Аннотация
Приведена линейная модель гидропривода ноги шагающей машины с насосом с LS-управлением.
Проведено моделирование данной системы в системе "Matlab+Simulink". Получены динамические
характеристики гидропривода по каждой степени свободы ноги (ЛАЧХ, ЛФЧХ, переходные процессы).
Abstract
The linear model of a hydraulic drive with the pump with LS-control of one leg of the walking
machine is composed. The simulation of the given system is held through a system
"Matlab+Simulink". The dynamic responses of a hydraulic drive of each degree of freedom are
obtained.
Содержание
Введение
1. Линейная модель гидропривода с LS-регулированием
2. Результаты моделирования динамики гидропривода с
LS-регулированием
Список литературы
Введение
В настоящее время имеются
два основных подхода - к математическому описанию динамики автоматических
систем. Первый подход базируется на передаточных функциях и тесно связанных с
ним частотных методах, второй – на методах пространства состояний. Метод
передаточных функций и частотные характеристики к середине 50-х годов
практически позволили решить проблему проектирования линейных автоматических
систем с одним входом и выходом. Несмотря на тенденцию широкого внедрения ЭВМ в
область анализа и синтеза автоматических систем; частотные методы не утратили
своего значения и сейчас. Реализация их на ЭВМ дает возможность в короткий срок
получить ценную информацию о проектируемой системе. По амплитудно-фазовым
частотным характеристикам можно судить о таких качественных показателях, как
запасы устойчивости по амплитуде и по фазе, резонансная частота, частота среза
и т.д. Комбинирование частотных и корневых методов при автоматизированном
анализе и синтезе линейных систем высокого порядка часто позволяет получить
достаточно полную информацию для синтеза.
Проектирование систем
управления с помощью амплитудно-фазовых частотных характеристик дает
возможность анализировать структуры и влияние параметров объекта и отдельных
его частей, решать задачи синтеза регулятора путем подбора корректирующих
звеньев, выполнять идентификацию по экспериментально снятым частотным
характеристикам и решать другие задачи.
В работе приведена
линеаризованная математическая модель, описывающая динамику гидропривода ноги
шагающей машины (ШМ). В гидроприводе использованы распределители с
пропорциональным управлением, насос с LS-управлением и
гидроцилиндры.
Моделирование
гидропривода, основанное на методах пространства состояний, было проведено
в [3].
В данной
работе представлена структурная схема гидропривода, состоящая из передаточных
функций соответствующего вида. В результате моделирования динамики гидропривода
были получены логарифмические амплитудные фазовые частотные характеристики. На
них показаны запасы по фазе и амплитуде, которые позволяют судить об
устойчивости системы. Также показаны переходные процессы для гидроприводов
каждой степени свободы ноги (голень, поворот стойки, бедро). Результаты
моделирования линеаризованной модели гидропривода, проведенного с помощью
системы "MATLAB+Simulink", представлены на графиках.
1. Линейная модель гидропривода с LS-регулированием.
При составлении линейной модели
гидропривода ШМ были приняты следующие предположения и допущения: коэффициенты
расходов дросселей и рабочих окон золотника являются постоянными;
гидродинамические силы, действующие на золотники LS-регулятора, ограничителя давления, пилотного
золотника пропорционального распределителя пренебрежимо малы; перетечки рабочей
жидкости через радиальные зазоры золотников и гидроцилиндров пренебрежимо малы;
нагружающий момент на шайбе насоса создается приведенной к штоку управляющего
гидроцилиндра массой подвижных частей; давление слива постоянно; величины
вязкости и модуля объёмной упругости не изменяются.
На рис.1,2 приведены
соответственно принципиальная и структурная схемы гидропривода с LS-управлением. На
рис.3 приведена принципиальная схема пропорционального распределителя.
Математическая модель двухступенчатого гидрораспределителя (рис.3) с
пропорциональным управлением представляет собой совокупность уравнений,
записанных для отдельных его элементов [2,3].
Уравнение
напряжений в электрической цепи магнита (ЭМ):
 (1) (1)
где  напряжение на выходе электронного усилителя; напряжение на выходе электронного усилителя;  активное сопротивление обмотки управления электромагнита; активное сопротивление обмотки управления электромагнита;  индуктивность обмотки управления электромагнита; индуктивность обмотки управления электромагнита;  коэффициент противо-ЭДС; коэффициент противо-ЭДС;  смещение якоря
электромагнита пилотного золотника. смещение якоря
электромагнита пилотного золотника.
После преобразований
уравнение цепи управления ЭМ будет иметь вид:
 (2) (2)
Из уравнения
цепи управления электромагнита следует, что передаточная функция цепи
управления электромагнита будет следующей:
 (3) (3)
Здесь  постоянная времени передаточной функции цепи управления
электромагнита, где постоянная времени передаточной функции цепи управления
электромагнита, где  индуктивность обмотки управления электромагнита; индуктивность обмотки управления электромагнита;  активное сопротивление обмотки электромагнита; активное сопротивление обмотки электромагнита;  сопротивление выходного каскада электронного усилителя; сопротивление выходного каскада электронного усилителя;  постоянная электромагнита, постоянная электромагнита,  коэффициент передачи электронного усилителя. коэффициент передачи электронного усилителя.
Уравнение движения плунжера пилотного
золотника:
 (4) (4)
где  масса плунжера
пилотного золотника; масса плунжера
пилотного золотника;  коэффициент,
учитывающий вязкое трение в зазоре между плунжером пилотного золотника и
гильзой; коэффициент,
учитывающий вязкое трение в зазоре между плунжером пилотного золотника и
гильзой;  гидродинамическая
сила, действующая на пилотный золотник со стороны рабочей жидкости; гидродинамическая
сила, действующая на пилотный золотник со стороны рабочей жидкости;  сила электромагнита; сила электромагнита;  жесткость пружины
пилотного золотника. жесткость пружины
пилотного золотника.
Пренебрегая массой пилотного
золотника, получим уравнение движения пилотного золотника в виде:
 ,
(5) ,
(5)
где  коэффициент вязкого
трения пилотного золотника, коэффициент вязкого
трения пилотного золотника,  жесткость
центрирующих пружин пилотного золотника, жесткость
центрирующих пружин пилотного золотника,  сила, действующая со стороны электромагнита. сила, действующая со стороны электромагнита.
Отсюда
передаточная функция пилотного золотника:
 (6) (6)
Здесь  постоянная времени
пилотного золотника, постоянная времени
пилотного золотника,  коэффициент усиления пилотного золотника, коэффициент усиления пилотного золотника,  электромагнитная сила
пропорционального магнита, действующая на пилотный золотник. электромагнитная сила
пропорционального магнита, действующая на пилотный золотник.
Расход жидкости через пилотный золотник:
 , (7) , (7)
где  , коэффициенты линеаризации: , коэффициенты линеаризации:
 ,
(8) ,
(8)
 проводимость окон
пилотного золотника, проводимость окон
пилотного золотника,  давление питания, давление питания,  давление нагрузки в
точке линеаризации, давление нагрузки в
точке линеаризации,  плотность рабочей
жидкости, плотность рабочей
жидкости,  диаметр пилотного
золотника, диаметр пилотного
золотника,  коэффициент расхода
окон пилотного золотника. коэффициент расхода
окон пилотного золотника.
С другой стороны расход жидкости на
управление равен
 (9) (9)
Сжимаемостью
рабочей жидкости в полостях управления основного золотника пренебрегаем из-за
малости объёма.
Уравнение движения плунжера
основного золотника имеет вид:
 (10) (10)
где  масса плунжера
основного золотника; масса плунжера
основного золотника;  коэффициент,
учитывающий вязкое трение в зазоре между плунжером основного золотника и
гильзой; коэффициент,
учитывающий вязкое трение в зазоре между плунжером основного золотника и
гильзой;  жесткость пружины
основного золотника; жесткость пружины
основного золотника;  гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости; гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости;  сила сухого трения
действующая на золотник; сила сухого трения
действующая на золотник;  перепад рабочей
жидкости на торцах основного золотника. перепад рабочей
жидкости на торцах основного золотника.
Пренебрегая массой основного
золотника, получим:
 (11) (11)
Выразим из этого уравнения  и подставим его в
(1). Приравняв (1) и (2) получим и подставим его в
(1). Приравняв (1) и (2) получим
 , (12) , (12)
где  коэффициент вязкого трения между плунжером основного
золотника и гильзой; коэффициент вязкого трения между плунжером основного
золотника и гильзой;  жесткость
центрирующих пружин основного золотника; жесткость
центрирующих пружин основного золотника;  разность давлений в
полостях управления основного золотника; разность давлений в
полостях управления основного золотника;  площадь торца
плунжера основного золотника. площадь торца
плунжера основного золотника.
После простых преобразований
передаточную функцию для основного золотника запишем в виде:
 (13) (13)
где  постоянная времени
передаточной функции основного золотника, постоянная времени
передаточной функции основного золотника,  коэффициент усиления
передаточной функции основного золотника. коэффициент усиления
передаточной функции основного золотника.
Уравнения расходов через основной
золотник
Расход через основной золотник:
 . (14) . (14)
Линеаризованное уравнение расхода
через основной золотник:
 , (15) , (15)
где
 - коэффициенты линеаризации. - коэффициенты линеаризации.
С другой стороны, расход
через основной золотник равен:
 (16) (16)
Приравняв уравнения (3) и (4), после
несложных преобразований, получим:
 , (17) , (17)
где  объём полости силового гидроцилиндра; объём полости силового гидроцилиндра;  перемещение плунжера основного золотника пропорционального
распределителя. перемещение плунжера основного золотника пропорционального
распределителя.
Структурная схема
пропорционального распределителя и электронного усилителя представлена на
рис.4.
Гидродинамические силы  , действующие на
золотник, определяются по формулам для «гидродинамической пружины». , действующие на
золотник, определяются по формулам для «гидродинамической пружины».
Уравнение
движения поршня силового гидроцилиндра имеет вид:
 (18) (18)
где  приведенная масса
поршня и подвижных элементов силового гидроцилиндра; приведенная масса
поршня и подвижных элементов силового гидроцилиндра;  коэффициент вязкого
трения в гидроцилиндре; коэффициент вязкого
трения в гидроцилиндре;  внешняя нагрузка, действующая на шток; внешняя нагрузка, действующая на шток;  площадь, равная площади поршня гидроцилиндра за вычетом
площади штока; площадь, равная площади поршня гидроцилиндра за вычетом
площади штока;  площадь поршня; площадь поршня;  давление в поршневой полости гидроцилиндра, давление в поршневой полости гидроцилиндра,  давление в штоковой
полости гидроцилиндра, давление в штоковой
полости гидроцилиндра,  перемещение поршня
силового цилиндра. Отсюда передаточная функция давления в силовом
гидроцилиндре: перемещение поршня
силового цилиндра. Отсюда передаточная функция давления в силовом
гидроцилиндре:
 , (19) , (19)
где  постоянная времени
передаточной функции давления силового гидроцилиндра. Структурная схема
исполнительного гидроцилиндра представлена на рис.5. постоянная времени
передаточной функции давления силового гидроцилиндра. Структурная схема
исполнительного гидроцилиндра представлена на рис.5.
При расчетах характеристик медленной
гидравлической шагающей машины учитывалась весомость звеньев ног и не
учитывалась их инерционность, следовательно, уравнение движения силового
гидроцилиндра запишем в виде:
 . (20) . (20)
После преобразования
уравнения получим:
 . (21) . (21)
Передаточная функция для
силового цилиндра:
 , (22) , (22)
где  коэффициент усиления передаточной функции гидроцилиндра; коэффициент усиления передаточной функции гидроцилиндра;
Уравнение
движения плунжера LS-золотника:
 23) 23)
где  масса плунжера LS-золотника; масса плунжера LS-золотника;  перемещение плунжера LS-золотника; перемещение плунжера LS-золотника;  коэффициент,
учитывающий вязкое трение в зазоре между плунжером золотника и корпусом; коэффициент,
учитывающий вязкое трение в зазоре между плунжером золотника и корпусом;  жесткость пружины; жесткость пружины;  сила предварительного
поджатия пружины; сила предварительного
поджатия пружины;  гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости; гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости;  площадь торца
плунжера золотника. площадь торца
плунжера золотника.
Пренебрегая массой золотника
получим передаточную функцию LS-золотника:
 (24) (24)
Здесь  постоянная времени передаточной функции LS-золотника. постоянная времени передаточной функции LS-золотника.
Уравнение расхода рабочей
жидкости через LS – золотник:
 , (25) , (25)
где  коэффициент расхода окна LS-золотника; коэффициент расхода окна LS-золотника;  перемещение LS – золотника; перемещение LS – золотника;  давление насоса; давление насоса;  давление в ЦУ-2; давление в ЦУ-2;  диаметр плунжера LS-золотника. диаметр плунжера LS-золотника.
Расход жидкости через канал в ЦУ-2
 , (26) , (26)
где  коэффициент расхода канала в ЦУ-2; коэффициент расхода канала в ЦУ-2;  диаметр ЦУ-2; диаметр ЦУ-2;  зазор между гильзой гидроцилиндра и поршнем; зазор между гильзой гидроцилиндра и поршнем;  плотность
рабочей жидкости. плотность
рабочей жидкости.
Уравнение баланса
расхода через LS-золотника:
 .
(27) .
(27)
После преобразований
получим:
 (28) (28)
Структурная схема LS-золотника
представлена на рис.6.
Уравнение
движения поршней гидроцилиндров управления (ЦУ №1,2 на рис.1):
 (29) (29)
где  суммарная масса
поршней цилиндров управления и присоединенных частей; суммарная масса
поршней цилиндров управления и присоединенных частей;  коэффициент вязкого трения; коэффициент вязкого трения;  жёсткость пружины; жёсткость пружины;  сила предварительного поджатия пружины; сила предварительного поджатия пружины;  площади поршней
цилиндров управления; площади поршней
цилиндров управления;  суммарный момент сопротивления, приложенный к органу
регулирования насоса, суммарный момент сопротивления, приложенный к органу
регулирования насоса,  перемещение поршней
гидроцилиндров управления. перемещение поршней
гидроцилиндров управления.
Пренебрегая массой поршней
гидроцилиндра управления, получим уравнение движения гидроцилиндра управления:
 (30) (30)
Из (30) следует, что передаточная функция
цилиндра управления:
 (31) (31)
Здесь  коэффициент усиления передаточной функции цилиндра
управления. коэффициент усиления передаточной функции цилиндра
управления.
Уравнение расходов в напорной
гидролинии, исходя из условия неразрывности течения жидкости, можно записать в
виде:
 , где (32) , где (32)
 подача насоса, подача насоса,  рабочий объём насоса, рабочий объём насоса,
 угловая скорость вала
насоса, угловая скорость вала
насоса,  угол наклона шайбы насоса; угол наклона шайбы насоса;  максимальный угол
наклона шайбы насоса. максимальный угол
наклона шайбы насоса.
 расход жидкости, подводимой к гидроприводам; расход жидкости, подводимой к гидроприводам;
 расход, идущий на управление. расход, идущий на управление.
Структурная схема гидропривода
поворота стойки состоит из передаточных функций всех элементов, входящих в него
(рис.7). Структурная схема гидроприводов привода бедра и голени имеет
аналогичный вид. Отличия лишь в значениях коэффициентов обратных связей,
коэффициентов усиления, диаметров поршней. Структурная схема гидроприводов ноги
(поворота стойки, голени и бедра) состоит из 3-х блоков аналогичных,
представленным на рис.7.
2. Исследование динамики гидропривода с LS-регулированием.
Simulink – это одна из
прикладных программ, входящих в систему Matlab, которая предназначена для
моделирования динамических систем. Программа обладает графическим интерфейсом,
которая позволяет достаточно просто формировать структурные схемы систем любой
степени сложности. Simulink включает в себя библиотеку различных
линейных и нелинейных компонентов, источников входных сигналов и т.д. В Simulink существует также
возможность создания собственных блоков.
Построение схемы
исследуемой системы производится при помощи копирования или перемещения блоков
из библиотеки в рабочее окно. Свойства каждого блока задаются при помощи меню Block Parameters, в котором можно
задать все необходимые параметры блока. Для просмотра результатов моделирования
используются несколько блоков, которые позволяют наблюдать за процессом
моделирования в режиме реального времени. В системе “Matlab+Simulink” можно строить
характеристики, используемые в теории автоматического управления, например
амплитудные фазовые частотные характеристики (диаграммы Боде), диаграмма Найквиста,
переходные процессы и. т.д.
Структурная схема
гидропривода одной ноги ШМ, состоящая из передаточных функций, входящих в неё
элементов, набранная в системе “Matlab+Simulink” представлена на
рис.8
Элементы
гидроприводов ноги объединены в макроблоки, каждый из которых имеет
соответствующее название («Поворот стойки», «Бедро», «Голень»). Отдельно
расположен макроблок, объединяющий элементы, входящие в насос (LS- распределитель,
цилиндры управления). Каждый из макроблоков гидроприводов, в свою очередь, содержит
макроблоки, описывающие работу пропорционального распределителя и
гидроцилиндра. На рис.9 показано содержимое макроблока для привода поворота
стойки. Содержимое каждого макроблока можно посмотреть, сделав двойной щелчок
левой кнопки мыши на его изображении.
Работа
пропорционального распределителя, включая электронный усилитель, описывается
передаточными функциями элементов, входящих в него (рис.10). Содержание
макроблока «Гидроцилиндр» включает в себя передаточные функции, описывающие
гидроцилиндр (рис.11).
В системе “Matlab+Simulink” имеется
возможность ввода нелинейностей различного вида, которые позволяют описать
процессы неподдающиеся линеаризации. В модели насоса используются нелинейности,
которые ограничивают выходную величину. Такие блоки имитируют ограничение
перемещения цилиндров управления, смещение
LS-золотника. Блок Fcn позволяет выполнять
математические операции над сигналами. Этот блок использовался для ввода
нелинейных уравнений, описывающих расходы жидкости через LS-золотник и канал в ЦУ
№2 (рис.12). Содержание макроблока «Насос» включает в себя передаточные
функции, описывающие функционирование насоса (Рис.13).
Результаты
моделирования
На рис.14 представлены переходные процессы
движений поршней гидроцилиндров в гидроприводах ноги (поворота стойки, голени и
бедра). Вид переходных процессов показывает, что замкнутая система гидропривода
одной ноги устойчива. Время переходных процессов равно времени переходных
процессов, полученных в результате моделирования нелинейной системы [3].
Важной динамической
характеристикой систем автоматического управления являются частотные
характеристики, достоинство которых состоит в том, что частотные характеристики
позволяют просто выявлять влияние того или иного параметра на динамические
свойства системы (устойчивость, переходной процесс и т.д.). Частотные
характеристики звеньев и систем строятся на основании их комплексных
передаточных функций. Для анализа устойчивости исследуемой гидравлической
системы управления применяются логарифмические амплитудные фазовые частотные
характеристики (ЛАФЧХ) разомкнутой цепи. Для этого необходимо разорвать
обратную связь по скорости гидроцилиндра, обозначить точки ввода, "input point", и точку
вывода, "output point", которые необходимы для получения частотных
характеристик.
ЛАЧХ и ЛФЧХ для
гидропривода каждой степени свободы ноги представлены на рис 15-17. Запасы по
частоте и амплитуде должны быть не менее определенных значений. Рекомендуемые
запасы по амплитуде - 6-8 дБ, по фазе -
 . Для гидропривода поворота стойки (рис 15) запас по
амплитуде составляет 9.75 дБ, запас по фазе . Для гидропривода поворота стойки (рис 15) запас по
амплитуде составляет 9.75 дБ, запас по фазе  , что является вполне достаточным. Гидропривод голени ноги
(рис 16): запас по амплитуде равен 10 дБ, запас по фазе - , что является вполне достаточным. Гидропривод голени ноги
(рис 16): запас по амплитуде равен 10 дБ, запас по фазе -  . Частотные характеристики гидропривода бедра (17) имеют
запас по амплитуде 8 дБ, запас по фазе . Частотные характеристики гидропривода бедра (17) имеют
запас по амплитуде 8 дБ, запас по фазе  . Ещё одним способом проверки устойчивости системы является
критерий Найквиста, который можно сформулировать следующим образом: «Если
разомкнутая цепь системы устойчива, то для устойчивости замкнутой системы
необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика
разомкнутой цепи не охватывала точку (-1). На рис.18-20 изображены диаграммы
Найквиста для гидроприводов соответственно голени, бедра и поворота стойки. Как
видно из графиков ни один из них не охватывает точку (-1), которая на каждом из
графиков обозначена крестиком. Из диаграмм следует, что гидроприводы устойчивы. . Ещё одним способом проверки устойчивости системы является
критерий Найквиста, который можно сформулировать следующим образом: «Если
разомкнутая цепь системы устойчива, то для устойчивости замкнутой системы
необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика
разомкнутой цепи не охватывала точку (-1). На рис.18-20 изображены диаграммы
Найквиста для гидроприводов соответственно голени, бедра и поворота стойки. Как
видно из графиков ни один из них не охватывает точку (-1), которая на каждом из
графиков обозначена крестиком. Из диаграмм следует, что гидроприводы устойчивы.
Список литературы
1. Боровин Г.К.
Математическое моделирование гидравлической системы управления шагающей машины.
Препринт №106. М.: Ин.прикл.матем. им.М.В.Келдыша РАН, 1995.
2. Боровин Г.К., Костюк
А.В. Математические модели гидравлического привода с LS-управлением
шагающей машины. Препринт №56. М.: Ин.прикл.матем. им. М.В.Келдыша РАН, 2000.
3. Боровин Г.К., Костюк
А.В. Математическое моделирование гидравлического привода с LS-управлением
шагающей машины. Препринт №54. М.: Ин.прикл.матем. им. М.В.Келдыша РАН, 2001.
4. Боровин Г.К., Костюк
А.В. Математическое моделирование систем управления шагающих машин // Тез.
докл. Научно-техн. конф. "Гидромашины, гидроприводы и
гидропневмоавтоматика". М.: МГТУ им.Н.Э.Баумана, 1999.
5. Медведев В.С.,
Потемкин В.Г. Cjntrol System Toolbox. Matlab5 для студентов (под общей
ред. К.т.н. В.Г.Потемкина)-М.:Диалог - МИФИ, 1999.

Рис.1.
Принципиальная схема привода с LS-управлением.
Рис.2. Структурная
схема гидропривода с LS-управлением.
Рис.3. Принципиальная схема пропорционального распределителя.
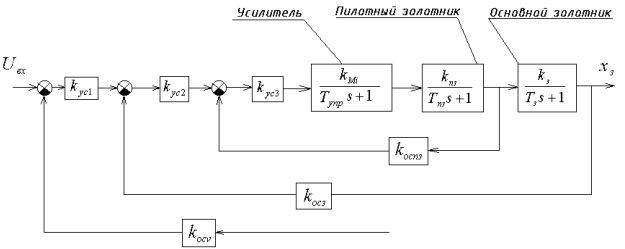
Рис.4. Структурная
схема пропорционального распределителя и электронного усилителя. (В этой схеме  коэффициент обратной связи по положению пилотного золотника; коэффициент обратной связи по положению пилотного золотника;  коэффициент обратной связи по положению основного золотника; коэффициент обратной связи по положению основного золотника;  коэффициент обратной
связи по скорости основного золотника) коэффициент обратной
связи по скорости основного золотника)
Рис.5. Структурная схема
исполнительного гидроцилиндра.
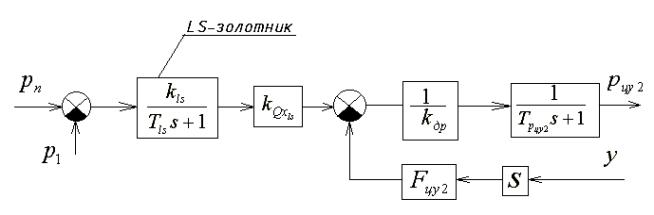
Рис.6. Структурная
схема LS-золотника.
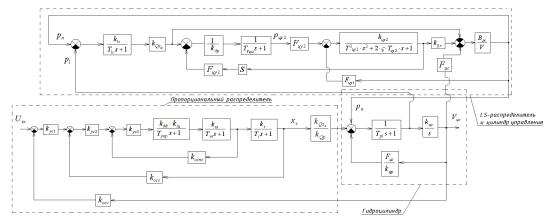
Рис.7. Структурная схема гидропривода поворота стойки ноги ШМ.
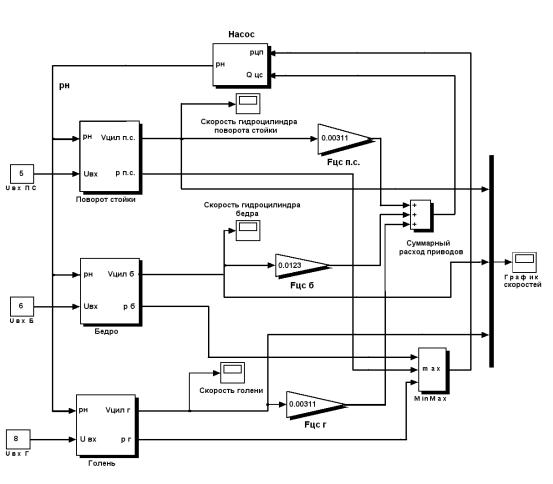
Рис.8. Структурная схема
гидроприводов ноги ШМ, набранная
в
системе ‘Matlab’.
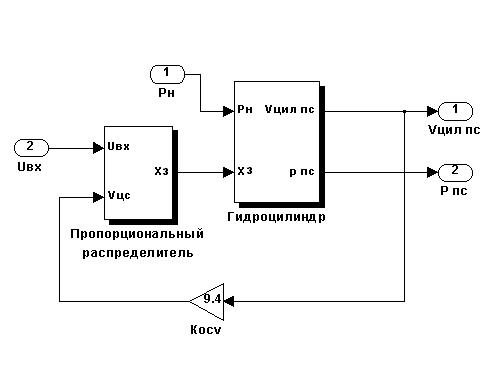
Рис.9. Макроблок для
гидропривода поворота ноги.
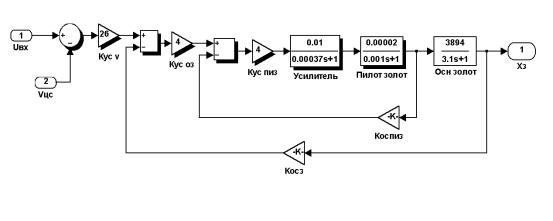
Рис.10. Макроблок для пропорционального
распределителя.
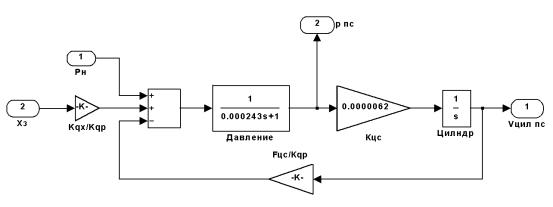
Рис.11.
Макроблок для гидроцилиндра.
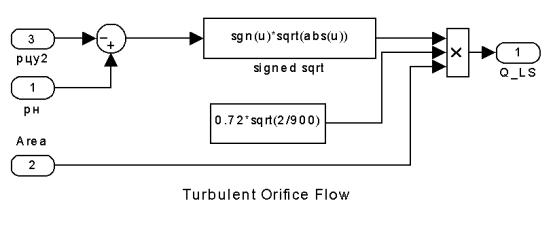
Рис.12. Макроблок,
описывающий уравнения расхода
жидкости через LS-золотник и канал ЦУ-2.
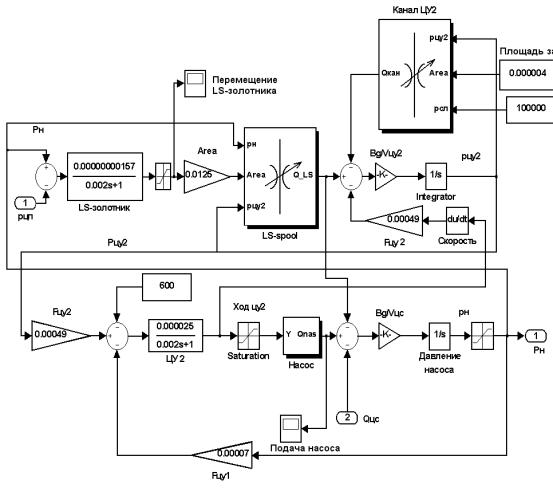
Рис.13.
Макроблок для насоса.
Рис.14. Переходные процессы в гидроприводах ноги ШМ.
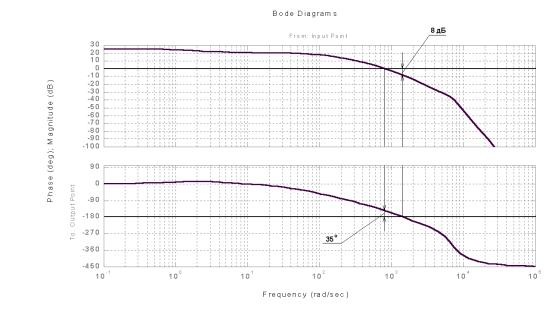
Рис.15.
ЛАФЧХ для гидропривода поворота стойки ноги.
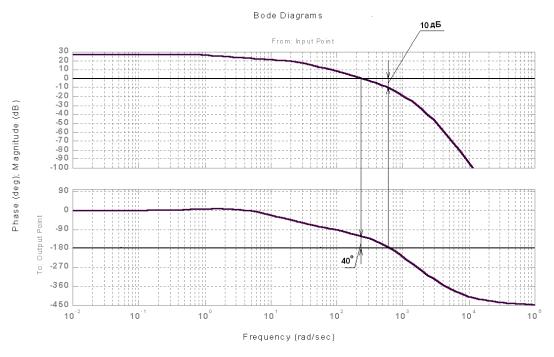
Рис.16.
ЛАФЧХ для гидропривода бедра ноги.
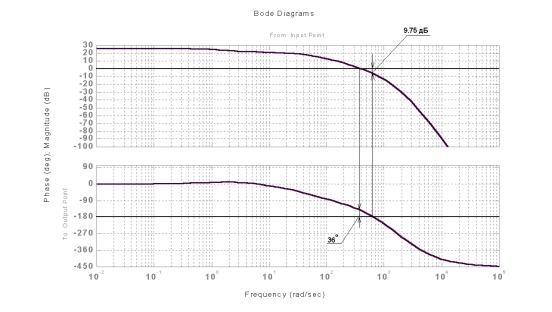
Рис.17.
ЛАФЧХ для гидропривода голени ноги.
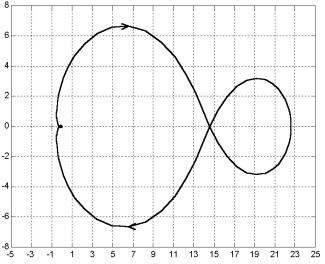
Рис.18. Диаграмма Найквиста
для привода голени.
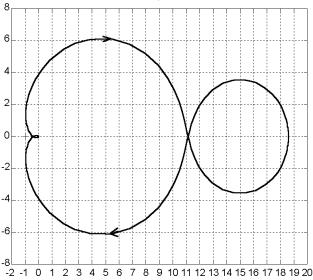
Рис.19. Диаграмма Найквиста
для привода бедра.
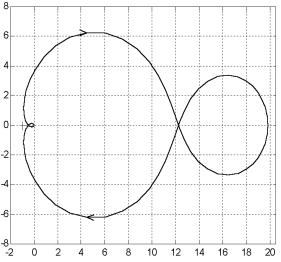
Рис.20. Диаграмма Найквиста
для привода поворота стойки.
|