Аннотация
Исследована задача о
построении движений робота-снейкбордиста, включающего снейкборд и установленный
на нем маховик, способный совершать управляемое вращение относительно кроссбара
снейкборда. Указано программное управление осями колес для обеспечения заданной
трассы движения произвольной точки кроссбара. Построено управление угловым
ускорением маховика снейкборда, обеспечивающее требуемый режим изменения
скорости центра кроссбара. Решена задача о максимальном разгоне кроссбара на
траектории типа "восьмерка".
Abstract
The problem on a motion
design for a robot-snakeborder is investigated. The mechanical part of the robot
includes a snakeboard and a flywheel, capable to perform the controllable
motion relative to a crossbar of a snakeboard. The program laws of wheel axes
control for improvment of prescribed traces of an any point of a crossbar are
developed. The angle acceleration of a flywheel control is designed for
improvement of desirable regulation for a velocity of a crossbar center of
mass. The problem on maximum increment of velocity along the trace of the form
of "eight" is solved.
Введение
Снейкборд был изобретен в
1989 году Джеймсом Фишером (James Fisher) и Оливером Маклеод-Смитом (Oliver
Macleod-Smith) уроженцами Йоганессбурга в Южной Африке [www]. В это время они были
19 летними студентами колледжа. В процессе разработки ими было создано
значительное число прототипов снейкбордов. Многие из них ломались сразу после
первых нескольких испытаний.
Организующей частью
снейкборда служит кроссбар (перекладина), опирающийся на две колесные пары по
бокам кроссбара (рис. ). Колесные пары могут вращаться относительно кроссбара
вокруг параллельных осей - осей колесных пар, жестко ориентированных
относительно кроссбара и перпендикулярных к осям вращения колес. На осях
колесных пар монтируются платформы для постановки ног, параллельные к колесным
осям.
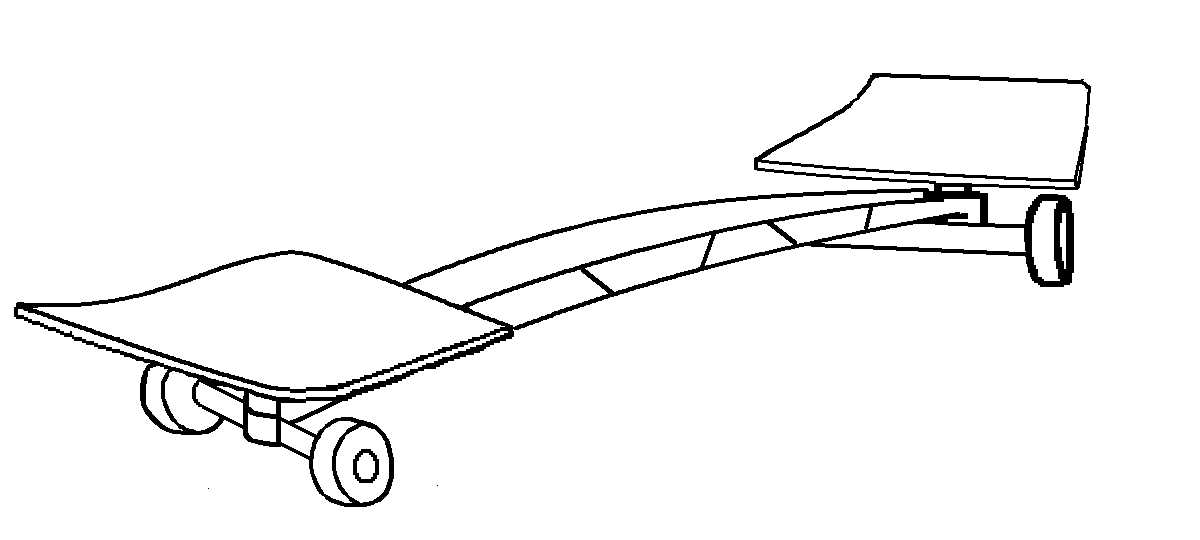
Figure 1: Общий вид снейкборда.
Для первого
прототипа кроссбар был сделан из куска старой водопроводной трубы, платформы
для постановки ног были вырезаны из старого стола для пинг-понга, а колеса для
платформ были взяты от старых роликов, разрезанных пополам. Сегодня кроссбары и
платформы делаются из очень прочного пластика и имеют совершенные пошипники в
колесах и в осях вращения платформ. Колеса делаются из специального материала,
имеющего хорошее сцепление с дорогой.
Благодаря своей конструкции и
специальному согласованному действию ног и корпуса спортсмена, снейкборд, в
отличие от скейтборда, совершая волнообразное движение, позволяет набирать
скорость без отталкивания ногой от земли, даже если перемещение происходит в
гору. Со временем выработался агрессивный тип катания на снейкборде, сопровождаемый
разнообразными трюками, и снейкбординг превратился в экстремальный вид спорта.
В 1994 г., через 5 лет после
изобретения снейкборда, был проведен первый чемпионат мира по снейкбордингу.
Джей Битти (Jay Beatty) был признан первым чемпионом мира по этому виду спорта.
С тех пор чемпионаты мира по снейкбордингу проводятся ежегодно (за исключением
1998 г.)
При отсутствии
проскальзывания колес относительно опорной поверхности снейкборд представляет
собой неголономную механическую систему с 9 степенями свободы и 4
неинтегрируемыми связями. Если возникает проскальзывание колес, то система
усложняется, так как для замыкания математической модели движения необходимо
иметь информацию об усилиях, возникающих в пятне контакта колеса с опорой.
Когда спортсмен, стоя на снейкборде, совершает относительные движения, система
становится еще более сложной.
Исследование динамики
снейкборда с помощью методов неголономной механики представляется естественным
[lewis,kuleshov]. Вместе с тем очевидно, что по существу все степени свободы системы
испытывают жесткое сервоуправление [golubev1,golubev3] со стороны спортсмена, а поле скоростей
кроссбара оказывается вращательным вокруг точки пересечения осей колес и
возникает вследствие действия теоремы о кинетическом моменте относительно этой
точки. С механической точки зрения система снейкборд-спортсмен аналогична
стержню, способному вращаться под управляемым воздействием маховика вокруг
некоторого центра. Причем положение центра вращения в свою очередь также может
волевым образом изменяться. В сходной задаче об управлении движением маятника с
помощью маховика положение центра вращения было зафиксировано как на стержне,
так и в пространстве [okh]. Пример более сложной системы, управляемой с помощью
маховика, исследован в [golubev2]. В предлагаемой работе сервосвязи, необходимые для
управления снейкбордом, формируются с учетом основных теорем механики системы.
Развиваемый подход дает возможность сознательно изменять как величину, так и
направление скорости движения и конструировать желаемую траекторию любой точки
кроссбара, когда все четыре колеса снейкборда находятся в соприкосновении с
опорой. Свойства движения такой системы служат выразительной иллюстрацией
понятия мгновенного центра скоростей, а также теоремы о кинетическом моменте
относительно подвижной точки. Безопорные фазы движения не рассматриваются.
0.1 Мгновенный центр скоростей
кроссбара
Исследуется механическая
система, состоящая из снейкборда, дополненного маховиком, вращающимся вокруг
оси, параллельной осям колесных пар и проходящей через середину кроссбара (рис.
). Предполагается наличие электроприводов, закрепленных на кроссбаре и
предназначенных для управления вращением маховика и изменения направления
колесных осей соответственно.

Figure 2: Робот снейкбордист.
С
кроссбаром снейкборда жестко свяжем подвижную систему координат Cxyz.
Начало C поместим в середину кроссбара, ось Cx направим вдоль
кроссбара, ось Cz - вертикально вверх, ось Cy - перпендикулярно
кроссбару и оси Cz так, чтобы вся система координат была правой. Пусть
кроссбар снейкборда имеет длину 2a, левая ось колес прикреплена к
кроссбару в точке A=(-a,0,0) и составляет с ним угол j1+p/2, правая ось прикреплена к кроссбару в точке D=(a,0,0)
и составляет с ним угол j2+p/2.
Примем, что колеса не могут проскальзывать в направлении, перпендикулярном
плоскости колеса. Тогда скорости точек шарнирного соединения кроссбара с осями
колес будут направлены горизонтально и перпендикулярно осям колес. Мгновенный
центр скоростей кроссбара лежит на пересечении осей колес. Его координаты в
осях Cxyz выражаются формулами
|
xv=-a
|
sin(j1+j2)
sin(j2-j1)
|
, yv=2a
|
cosj1cosj2
sin(j2-j1)
|
.
|
|
(1)
|
При j2-j1
→
pk, k=0,
±
1,
±
2,...,
мгновенный центр скоростей устремляется к бесконечности. Если координаты
мгновенного центра скоростей заданы, то углы поворота осей колес могут быть
найдены из равенств
|
tgj1=-
|
a+xv
yv
|
, tgj2=
|
a-xv
yv
|
.
|
|
(2)
|
Пусть Oxhz - абсолютная система координат, для которой ось Oz сонаправлена с осью Cz. В ней (xc,hc,zc)
суть координаты точки C. Ось Cx составляет с осью Ox угол y.
Найдем абсолютные координаты мгновенного центра скоростей
|
xv=xc+xvcosy-yvsiny, hv=hc+xvsiny+yvcosy.
|
|
(3)
|
Поле скоростей твердого тела
устроено так [golubev], что мгновенный центр скоростей как часть кроссбара имеет
абсолютную скорость, равную нулю. Поэтому для скорости центра кроссбара имеем
выражение
|
|
Ч
x
|
c
|
= |
Ч
y
|
(xvsiny+yvcosy), |
Ч
h
|
c
|
= |
Ч
y
|
(-xvcosy+yvsiny), |
| (4) |
а для произвольной точки (x,y,z)
в осях Cxyz, жестко связанных с кроссбаром, абсолютная скорость дается
формулами
|
|
Ч
x
|
=- |
Ч
y
|
[(x-xv)siny+(y-yv)cosy], |
Ч
h
|
= |
Ч
y
|
[(x-xv)cosy-(y-yv)siny]. |
| (5) |
При фиксированных углах j1 и j2 как
относительное положение мгновенного центра скоростей в осях Cxyz, так и
абсолютное его положение в осях Oxhz сохраняются. Если же углы j1 и j2 зависят
от времени, тогда мгновенный центр скоростей будет смещаться и опишет в осях Cxyz
подвижную, а в осях Oxhz -
неподвижную центроиды. При этом скорость движения мгновенного центра скоростей
по подвижной центроиде выразится формулами
|
|
Ч
x
|
v
|
= |
|
a( |
Ч
j
|
2
|
sin2j1- |
Ч
j
|
1
|
sin2j2) |
sin2(j2-j1)
|
, |
Ч
y
|
v
|
= |
|
2a( |
Ч
j
|
1
|
cos2j2- |
Ч
j
|
2
|
cos2j1) |
sin2(j2-j1)
|
. |
|
а компоненты скорости
движения мгновенного центра скоростей по неподвижной центроиде будут иметь вид
|
|
Ч
x
|
v
|
= |
Ч
x
|
v
|
cosy- |
Ч
y
|
v
|
siny, |
Ч
h
|
v
|
= |
Ч
x
|
v
|
siny+ |
Ч
y
|
v
|
cosy. |
| (6) |
Если известны скорости [(x)\dot]v,
[(y)\dot]v, то угловые скорости поворота осей колес
вычисляются по формулам
|
|
Ч
j
|
1
|
= |
(a+xv)2+yv2
|
, |
Ч
j
|
2
|
=- |
(a-xv)2+yv2
|
. |
| (7) |
Задавая центроиды, можно
формировать требуемое движение какой-нибудь точки B=(x,0,0)
кроссбара. При x=0 точка B совпадает с точкой C, при x=▒a точка B
совпадает с одним из концов кроссбара.
1.1. Потребуем,
например, чтобы точка B двигалась параллельно оси Ox. В соответствии с формулами (5)
это означает, что должно быть
|
|
Ч
h
|
= |
Ч
y
|
[(x-xv)cosy+yvsiny]=0. |
|
Предположив, что [(y)\dot]
≠
0 (движение происходит), отсюда найдем
Это равенство еще не
определяет однозначно неподвижную центроиду.
В частности, можно
дополнительно потребовать, чтобы кроссбар двигался поступательно. Обозначим
квадрат расстояния от точки C
до мгновенного центра скоростей. Поступательное движение кроссбара со скоростью
v получается при
rv
→∞
, [(y)\dot]
→
0, причем [(y)\dot]rv=v. Тогда из равенств (8)
и (2) следует
|
|
lim
rv
→∞
|
|
xv
yv
|
=tgy, |
lim
rv
→∞
|
tgj1 = |
lim
rv
→∞
|
tgj2=-tgy. |
|
Иначе говоря, оси колес
должны быть параллельны оси Oh.
Другое дополнительное условие
можно взять, задав, например, расстояние rv=
√
{xv2+yv2}
от точки C до мгновенного центра скоростей. Тогда вместе с (8) получим
|
xv= |
1+tg2y
|
, yv= |
1+tg2y
|
. |
| (10) |
Эти выражения имеют смысл при
любом значении y, когда rv2
≥
x2. Уравнение подвижной центроиды дается соотношением (9), и при постоянном rv ему
отвечает окружность. Неподвижная центроида определена равенствами
|
xv=xc+xcosy, hv=hc
±
|
Ц
|
rv2-x2cosy
|
. |
|
При этом точка B будет
двигаться прямолинейно вдоль оси Ox со скоростью
|
|
Ч
x
|
b
|
=- |
Ч
y
|
(xsiny-± |
Ц
|
r2-x2cos2y
|
). |
|
Приведенные формулы для
прямолинейного движения точки B существенно упрощаются, когда x=0,
т.е. когда точка B совпадает с точкой C. Тогда при
соответствующем выборе знаков получим
|
xv=
±
rvsiny, yv=
±
rvcosy, xv=xc, hv=hc
±
rv, |
Ч
x
|
c
|
=
±
|
Ч
y
|
rv. |
| (11) |
Выберем в правых частях
формул (11) знак "+". Тогда при постоянном rv
неподвижная центроида есть прямая, параллельная Ox. Точка C отстоит от нее на расстояние 2a
ближе к началу координат, абсолютная ордината точки C остается
постоянной, и при положительном значении [(y)\dot] абсолютная абсцисса точки C возрастает.
Аналогично, если в правых
частях формул (11) взять знак "-", то при постоянном rv
неподвижная центроида по-прежнему есть прямая, параллельная Ox. Однако, в этом случае она отстоит от точки C
ближе к началу координат O на расстояние 2a. Абсолютная ордината
точки C остается постоянной, и при положительном значении [(y)\dot] абсолютная абсцисса точки C убывает.
При постоянном rv
скорость точки C пропорциональна [(y)\dot]. Для того, чтобы направление движения точки C не менялось
при изменении знака [(y)\dot], в
правых частях формул (11) в моменты времени, когда [(y)\dot]=0, следует менять знак на противоположный.
Движение точки C будет происходить строго в одну сторону, если операцию
смены знака выполнять почти мгновенно. Однако, в любом случае движение точки C
будет происходить с остановками при [(y)\dot]=0.
Избежать остановок точки C
при [(y)\dot]=0 возможно. Для этого
необходимо в соответствующие событию [(y)\dot]=0 моменты времени устремлять мгновенный центр скоростей к
бесконечности. Например, с учетом того, что x=0, можно принять
где k - постоянный коэффициент, имеющий размерность
времени. Тогда, выбирая знак "+" в формулах (11),
получим
Таким образом, при любом
законе y = y(t), определяющем угловое движение кроссбара,
где t - время и существование производной [(y)\dot] предполагается, точка C будет двигаться
прямолинейно параллельно оси Ox с постоянной скоростью, направление которой зависит от знака
коэффициента k, причем
чем меньше |k|, тем больше скорость точки C.
1.2. Рассмотрим
движение, при котором точка A перемещается строго вдоль оси Ox, а точка D - строго вдоль оси Oh. Тогда точка C будет вынуждена двигаться по
дуге окружности радиуса a с центром в точке O. При этом
|
j1=-y, j2=
|
p
2
|
-y, xv=-acos2y,
yv=asin2y.
|
|
Как и следовало ожидать,
подвижная центроида есть окружность постоянного радиуса rv=a
с центром в точке C. Далее
|
xc=-acosy, hc=asiny, xv=-2acosy, hv=2asiny,
|
|
и неподвижная центроида есть
окружность постоянного радиуса 2a с центром в точке O. Скорость
точки C выражается формулами
|
|
Ч
x
|
c
|
= |
Ч
y
|
asiny, |
Ч
h
|
c
|
= |
Ч
y
|
acosy. |
|
При [(y)\dot] > 0 точка C движется по ходу часовой
стрелки, если смотреть со стороны положительного направления оси Oz.
1.3. Исследуем вариант
движения, при котором кроссбар направлен по касательной к траектории
произвольной точки кроссбара. Снова возьмем на оси Cx некоторую точку B=(x,0,0)
кроссбара. Для простоты примем
|
(a+x)tgj2=(x-a)tgj1=
|
(a2-x2)
d
|
,
|
|
(14)
|
где d имеет
размерность длины. Тогда из (1) и (5)
получим
|
xv=x, yv=d, rv= |
Ц
|
x2+d2
|
, |
Ч
x
|
b
|
=d |
Ч
y
|
cosy, |
Ч
h
|
b
|
=d |
Ч
y
|
siny. |
| (15) |
Другими словами, скорость vb=
√
{[(x)\dot]b2+[(h)\dot]b2} точки B
оказывается пропорциональной d, а угол наклона касательной к траектории
точки B совпадает с наклоном кроссбара к оси Ox:
Если d выбрано
постоянным, то тогда мгновенный центр скоростей есть неподвижная точка в осях Cxy,
а значит (см. формулы (6)) и в осях Oxh. Имеем
|
xb(t)-xb(t0)=d(siny-siny0), hb(t)-hb(t0)=-d(cosy-cosy0),
|
|
где y0 -
начальное значение угла y. Движение
точки B происходит по окружности радиуса d с центром в точке с
координатами
|
x = xb(t0)-dsiny0,
h = hb(t0)+dcosy0,
|
|
которая совпадает с выбранным
в данном случае мгновенным центром скоростей, а кроссбар ориентирован по
касательной к окружности в этой точке.
В том случае, когда d
меняется, подвижная центроида есть прямая, проходящая через точку B
перпендикулярно кроссбару. Для движения точки B по произвольной кривой с
постоянной скоростью примем
|
d= |
a
|
, tgj1=- |
a+x
a
|
k |
Ч
y
|
, tgj2= |
a-x
a
|
k |
Ч
y
|
. |
| (16) |
Тогда неподвижная центроида
совпадет с геометрическим местом центров кривизны заданной траектории движения
точки B.
При использовании формул (16) обеспечить прямолинейное движение точки B
невозможно. Однако, если в процессе движения будет выполнено неравенство -p/2 < y < p/2, то
движение будет колебательным и в среднем будет происходить вдоль оси Ox (отсюда и название "snakeboard"). Требуемую
траекторию движения точки B вдоль оси Ox можно задать посредством дважды непрерывно
дифференцируемой функции hc=hc(xc).
Тогда будем иметь cosy > 0 и
|
tgy = hўb, |
cos2y
|
= h"b |
Ч
x
|
b
|
, |
Ч
y
|
= |
ah"b
k[1+(hўb)2][ 3/2]
|
, |
|
где штрихом обозначено
дифференцирование по xb. Например, можно взять зависимость
|
hb=asin(w[x-xb(t0)])+hb(t0).
|
|
При малых значениях
коэффициентов a и w такая траектория будет незначительно отличаться от
прямой, параллельной оси Ox.
Траекторию точки B
достаточно произвольной формы на плоскости можно задать параметрически:
где p - параметр
траектории. Чтобы определить соответствующее такому движению значение [(y)\dot], воспользуемся формулами (15).
Тогда
|
xbў |
Ч
p
|
= |
a
k
|
cosy, hbў |
Ч
p
|
= |
a
k
|
siny, tgy= |
hbў
xbў
|
, |
Ч
p
|
= |
a
|
, |
Ч
y
|
= |
a(hb"xbў-hbўxb")
k(xbў2+hbў2)[ 3/2]
|
. |
|
Для возможности выполнения
требуемого движения выбранным способом (16) необходимо
соответствие начальных условий, и в частности должно быть
|
tgy(t0)=hb
′
(p(t0))/xb
′
(p(t0)).
|
|
Пусть кроссбар уже
ориентирован по отношению к оси Ox под углом y0. Пусть также стандартные уравнения кривой точки B
заданы в некоторой прямоугольной системе координат O
′
[(x)\tilde][(h)\tilde] уравнениями
Найдем такое преобразование
координат
|
x = x0+
|
|
cosa-
|
|
sina, h = h0+
|
|
sina+
|
|
cosa,
|
|
(18)
|
чтобы при p=0 было
выполнено
|
|
|
xb(t0)=x0+ |
~
x
|
(0)cosa- |
~
h
|
(0)sina, |
| |
hb(t0)=h0+ |
~
x
|
(0)sina+ |
~
h
|
(0)cosa, |
|
|
cosy0= |
|
~
x
|
ў(0)cosa- |
~
h
|
ў(0)sina |
|
, |
| |
siny0= |
|
~
x
|
ў(0)sina+ |
~
h
|
ў(0)cosa |
|
, |
|
|
|
|
Эти уравнения однозначно
определяют преобразование (18), а вместе с ним и
зависимость (17), согласованную по начальным условиям
с начальным положением кроссбара. В качестве примеров кривых, реализуемых
указанным методом, приведем
0.2 Уравнение кинетического момента
Учтем, что снейкборд снабжен
маховиком, ось которого проходит через точку C параллельно направлению
осей вращения колес (рис. 2). Маховик приводится во
вращение электродвигателем, установленным на кроссбаре. Угол вращения маховика
относительно кроссбара обозначим j. Аналогично, колесные пары приводятся во вращение соответствующими
электродвигателями, также расположенными на кроссбаре. Будем считать, что
сопротивление качению колес по плоскости отсутствует, а система обладает
свойством массовой симметрии относительно точки C. Это значит, что
центры масс кроссбара и маховика расположены в точке C, а массы и
моменты инерции колесных пар одинаковы. Для простоты примем, что снейкборд
движется по горизонтальной плоскости. При отсутствии продольного сопротивления
качению реакции плоскости, препятствуя смещению колес вдоль их осей, направлены
точно в мгновенный центр скоростей кроссбара. Поэтому проекция уравнения
изменения кинетического момента снейкборда вместе с маховиком относительно
мгновенного центра скоростей кроссбара на ось Oz примет вид [golubev]
|
|
dK
dt
|
-M |
Ч
y
|
(xv |
Ч
x
|
v
|
+yv |
Ч
y
|
v
|
)=0. |
| (19) |
Здесь K - кинетический
момент всей системы относительно оси, проходящей через мгновенный центр
скоростей параллельно Oz, M
- масса всей системы, выражение в круглых скобках есть составляющая на ось Oz скорости мгновенного центра скоростей, векторно
умноженной на скорость центра масс C. По теореме Кенига [golubev] найдем
|
K= |
Ч
y
|
[Mrv2+b]+Jg |
Ч
j
|
+Jw( |
Ч
j
|
1
|
+ |
Ч
j
|
2
|
), |
| (20) |
где
|
M=m+mg+2mw,
b=2mwa2+J+Jg+2Jw,
|
|
m - масса кроссбара, mg - масса
маховика, mw - масса колесной пары, J - момент инерции
кроссбара вместе с жестко закрепленными на нем частями колесных систем
относительно оси Cz, Jg
- момент инерции маховика относительно той же оси, Jw -
момент инерции колесной пары относительно ее оси. Нетрудно заметить, что
|
xv |
Ч
x
|
v
|
+yv |
Ч
y
|
v
|
= |
d
dt
|
|
ж
и
|
rv2
2
|
ц
ш
|
. |
|
Из формул (1)
следует, что величина rv2 есть
функция от углов j1 и j2, реализуемых соответствующими электродвигателями. При
задании сервосвязей [golubev1] в виде зависимостей величины rv как
функции от углов и угловых скоростей кроссбара и маховика уравнение (19) определит взаимное влияние движений маховика и
кроссбара. Задавая в этом случае требуемое движение кроссбара, можно будет
получить закон изменения угловой скорости маховика, реализующий это движение.
0.3 Программные управления
Отвлекаясь в этом разделе от
влияния переходных процессов, возникающих при реализации сервосвязей [golubev1],
рассмотрим несколько примеров.
3.1. Сервосвязь вида rv=rv([(y)\dot]). Уравнение (19) можно
привести к виду
|
|
d
dt
|
|
ж
з
и
|
K- |
2
|
rv2 |
ц
ч
ш
|
+ |
2
|
rv2=0. |
|
Отсюда следует, что если
величина rv зависит только от [(y)\dot], то уравнение кинетического момента допускает
первый интеграл
|
K- |
2
|
+F( |
Ч
y
|
)=s, F( |
Ч
y
|
)= |
M
2
|
|
у
х
|
rv2( |
Ч
y
|
) d |
Ч
y
|
, |
| (21) |
где s - постоянная интегрирования, [(y)\dot] - начальное значение угловой скорости
кроссбара.
3.1.а. Пусть задан закон
y = ys(t)
требуемого углового движения кроссбара и для него выполнены равенства (8) и (12), означающие, что точка C
движется прямолинейно вдоль оси Ox с постоянной скоростью. Тогда
|
rv2= |
4a2
|
, F( |
Ч
y
|
s
|
)=- |
2Ma2
|
. |
| (22) |
Интеграл кинетического
момента для y
≡
ys принимает вид
|
b |
Ч
y
|
s
|
+Jg |
Ч
j
|
s
|
+Jw( |
Ч
j
|
1
|
+ |
Ч
j
|
2
|
)=s. |
| (23) |
Этот интеграл получен в
предположении, что, как следует из (2), (13), углы колесных пар удовлетворяют равенствам
|
tgj1s=- |
2acosys
|
-tgys, tgj2s= |
2acosys
|
-tgys. |
| (24) |
Совокупность соотношений (23), (24) следует рассматривать как набор
сервосвязей, обеспечивающих заданное с помощью программной функции y = ys(t) движение
кроссбара при условии, что в начальный момент времени сервосвязи
удовлетворяются. Поскольку в реальности начальные условия могут оказаться
произвольными, необходимо за счет управления движением маховика и колесных пар
обеспечить соотношения
|
y
→
y
s,
j
→
j
s,
j1
→
j1s, j2
→
j2s
при t
→∞
.
|
|
(25)
|
С учетом того, что функция ys(t)
считается заданной и известной, соотношения (24) представляют
собой геометрические связи. Соответствующие им дифференциальные связи имеют
вид:
|
|
|
|
Ч
j
|
1s
|
=- |
cos2j1s
cos2ys
|
(q+ |
Ч
y
|
s
|
), |
Ч
j
|
2s
|
= |
cos2j2s
cos2ys
|
(q- |
Ч
y
|
s
|
), |
|
|
q= |
k
2a
|
( |
ЧЧ
y
|
s
|
cosys+ |
Ч
y
|
2
s
|
sinys). |
|
|
|
| (26) |
Для построения переходного
процесса требуются также вторые производные от функций (26):
|
|
|
|
ЧЧ
j
|
1s
|
=-2 |
Ч
j
|
2
1s
|
tgj1s- |
cos2j1s
cos3ys
|
[( |
Ч
q
|
+ |
ЧЧ
y
|
)cosys+2(q+ |
Ч
y
|
s
|
)sinys], |
|
|
|
ЧЧ
j
|
2s
|
=-2 |
Ч
j
|
2
2s
|
tgj1s+ |
cos2j2s
cos3ys
|
[( |
Ч
q
|
- |
ЧЧ
y
|
)cosys+2(q- |
Ч
y
|
s
|
)sinys], |
|
|
|
Ч
q
|
= |
k
2a
|
|
й
л
|
ж
и
|
d3ys
dt3
|
+ |
Ч
y
|
3
s
|
ц
ш
|
cosys+ |
ЧЧ
y
|
s
|
|
Ч
y
|
s
|
sinys |
щ
ы
|
. |
|
|
|
| (27) |
Кроме того, заметим, что
вторую производную от связи (23) можно с учетом (22) представить в эквивалентном виде
|
|
d
dt
|
[ |
Ч
y
|
s
|
(Mrv2+b)+Jg |
Ч
j
|
s
|
+Jw( |
Ч
j
|
1s
|
+ |
Ч
j
|
2s
|
)]- |
M
2
|
|
Ч
y
|
s
|
|
drv2
dt
|
=0. |
| (28) |
3.1.б. Предположим,что
задан закон y = ys(t)
углового движения кроссбара и для него выполнены равенства (16).
В этом случае
3.1.Ў. _а_¤ЇR y = ys(t)
г_16). ' нвR¬ б<гз _
|
rv2=x2+ |
a2
|
, F( |
Ч
y
|
s
|
)= |
M
2
|
|
ж
з
и
|
x2 |
Ч
y
|
s
|
- |
a2
|
ц
ч
ш
|
, |
|
интеграл кинетического
момента (21) принимает вид
|
(Mx2+b) |
Ч
y
|
s
|
+Jgjs+Jw(j1s+j2s)=s, |
| (29) |
а углы j1s
и j2s определены формулами
|
tgj1s=- |
a+x
a
|
k |
Ч
y
|
s
|
, tgj2s= |
a-x
a
|
k |
Ч
y
|
s
|
, |
| (30) |
Дифференцирование сервосвязей
(30) приводит к равенствам
|
|
|
|
Ч
j
|
1s
|
=- |
a+x
a
|
k |
ЧЧ
y
|
s
|
cos2j1s, |
Ч
j
|
2s
|
= |
a-x
a
|
k |
ЧЧ
y
|
s
|
cos2j2s, |
|
|
|
ЧЧ
j
|
1s
|
=- |
a+x
a
|
k |
ж
и
|
d3ys
dt3
|
cos2j1s- |
ЧЧ
y
|
s
|
|
Ч
j
|
1s
|
sin2j1s |
ц
ш
|
, |
|
|
|
ЧЧ
j
|
2s
|
= |
a-x
a
|
k |
ж
и
|
d3ys
dt3
|
cos2j2s- |
ЧЧ
y
|
s
|
|
Ч
j
|
2s
|
sin2j2s |
ц
ш
|
. |
|
|
|
| (31) |
Производную от уравнения
сервосвязи (29) можно привести к виду (28).
Видим, что как в случае
3.1.а, так и в случае 3.1.б, для построения переходного процесса управлением
колесных пар требуется существование не только вторых, но и третьих производных
по времени от программной функции ys(t)
3.2. Сервосвязь вида rv=rv(j,[(j)\dot]).
Уравнение кинетического момента (19) можно привести к
виду
|
|
ЧЧ
y
|
(Mrv2+b)+ |
M
2
|
|
Ч
y
|
|
d
dt
|
rv2 = -Jg |
ЧЧ
j
|
-Jw( |
ЧЧ
j
|
1
|
+ |
ЧЧ
j
|
2
|
). |
|
Воспользуемся тем, что левая
часть этого уравнения имеет интегрирующий множитель (
±√
{Mrv2+b})-1:
|
|
d
dt
|
|
ж
и
|
+ |
Ч
y
|
|
Ц
|
Mrv2+b
|
ц
ш
|
= -± |
|
Jg |
ЧЧ
j
|
+Jw( |
ЧЧ
j
|
1
|
+ |
ЧЧ
j
|
2
|
) |
|
. |
|
Учитывая возможность
отрицательных значений rv, перепишем это соотношение в виде
|
|
d
dt
|
|
ж
и
|
Ч
y
|
rv |
Ц
|
M+brv-2
|
ц
ш
|
= - |
|
Jg |
ЧЧ
j
|
+Jw( |
ЧЧ
j
|
1
|
+ |
ЧЧ
j
|
2
|
) |
|
. |
| (32) |
Стесним движения колесных пар
связями (14), где для простоты положим x=0. Тогда
точка B совпадает с серединой C снейкборда, причем rv=d,
так что
|
tgj1s=-
|
a
rv
|
, tgj2s=
|
a
rv
|
,
j1s+j2s
≡
0,
|
|
(33)
|
и уравнение кинетического
момента примет вид
|
|
d
dt
|
|
ж
и
|
Ч
y
|
rv |
Ц
|
M+brv-2
|
ц
ш
|
= - |
|
. |
| (34) |
3.2.а. При условии rv=rv([(j)\dot]) уравнение (34)
допускает первый интеграл
|
|
Ч
y
|
rv |
Ц
|
M+brv-2
|
+F1( |
Ч
j
|
)=s1, |
| (35) |
где
Интеграл (35)
означает, что если функция j
будет периодической, то такой же будет и скорость vc=[(y)\dot]rv середины C
кроссбара. Другими словами, в данном случае не будет происходить накопление
скорости кроссбара. Например, пусть rv=k[(j)\dot]-1. Тогда
и интеграл (35)
принимает вид
3.2.б. Зададим периодический
закон изменения угла j с помощью
уравнения
Пусть, кроме того, rv=k1j-1. Тогда
уравнение (34) примет вид
|
|
d
dt
|
|
ж
и
|
Ч
y
|
rv |
Ц
|
M+brv-2
|
ц
ш
|
= |
Jgw2j2
|
. |
| (37) |
Правая часть этого уравнения
неотрицательна. Поэтому при j
¬≡
0 скорость vc=[(y)\dot]rv будет возрастать, и,
например, при j = acosw(t-t0) ее можно сделать неограниченно большой. Чтобы
проиллюстрировать сказанное, вместо точного уравнения (37)
рассмотрим приближенное уравнение
|
|
d
dt
|
|
ж
и
|
Ч
y
|
rvЦM |
ц
ш
|
= |
Jgw2j2
k1ЦM
|
, |
| (38) |
характеризующее разгон
снейкборда при малых амплитудах a. Пусть t = t-t0. Интегрируя, найдем
|
vc= |
Jgw2a2
2k1ЦM
|
|
ж
и
|
t+ |
sin2wt
2w
|
ц
ш
|
, y = |
Jgwa2
2k12M
|
|
ж
и
|
tsinwt- |
3coswt+cos3wt-4
3w
|
ц
ш
|
. |
|
Видим, что при выбранном
режиме управления осями колес происходит линейное увеличение амплитуды
колебаний по углу y со
временем.
3.3. Рассмотрим возможность
разгона кроссбара в том случае, когда задана траектория его середины C.
При этом будем предполагать, что осевая линия кроссбара направлена по
касательной к указанной траектории, а управление осями колес осуществляется в
соответствии с формулами (14), в которых примем x=0.
3.3.а. Назначим траекторию
движения точки C в виде
|
h = h(x), hў= |
dh
dx
|
, h" = |
d2h
dx2
|
, |
1
rv
|
= |
h"
[1+(hў)2]3/2
|
. |
|
Уравнение (34)
можно тогда представить в виде
|
|
d(mvc)
dt
|
=- |
m[1+(hў)2]3/2
|
, m = |
ж
Ц
|
|
. |
| (39) |
Величина m нигде не обращается в нуль и ограничена по величине
при ограниченных значениях h
′
и h". Следовательно, для того
чтобы обеспечить увеличение скорости точки C, достаточно управлять
движением маховика так, чтобы почти на всей заданной траектории разгона было
выполнено неравенство
Наоборот, чтобы погасить
скорость движения, достаточно за счет управления маховиком добиться выполнения
неравенства
Углы колесных пар в
соответствии с равенствами (33) определяются положением
точки C на траектории
|
tgj2s=-tgj1s= |
ah"
[1+(hў)2]3/2
|
. |
|
Пусть, например, траектория
точки C задана в виде
|
h = h0sin[n(x-x0)], hў=h0ncos[n(x-x0)], h"=-n2h. |
| (41) |
В этом случае увеличение
скорости точки C будет обеспечено, если в соответствии с (40) при h
> 0 угловое ускорение [(j)\ddot]
сделать положительным, а при h
< 0 - отрицательным. Далее, пусть h0n << 1. Это означает, что длина волны l = 2p/n траектории значительно превосходит амплитуду ее
колебаний (движение происходит почти по прямой). Тогда
Другими словами, углы,
составляемые осями колесных пар с вертикалью, должны быть малыми и
пропорциональными отклонению траектории от оси Ox. При положительных значениях h они будут, как и следовало ожидать, j2s=-j1s
< 0, а при h < 0 -
наоборот j2s=-j1s > 0.
Описанный метод разгона
кроссбара вдоль траектории (41) не дает возможности начать
движение с точки, где h = 0, так
как в ней оси колес оказываются перпендикулярными кроссбару, а знак [(j)\ddot] неопределен. Избежать этого затруднения можно,
немного сместив начало координат, а тем самым и всю программную траекторию
параллельно самой себе так, чтобы в начальный момент времени движения оказалось
h
≠
0.
3.3.б. Пусть траектория
задана параметрически в виде
|
|
|
x = x(p), h = h(p), xў= |
dx
dp
|
, hў= |
dh
dp
|
, |
|
|
x"= |
d2x
dp2
|
, h"= |
d2h
dp2
|
, |
1
r
|
= |
xўh"-hўx"
[(xў)2+(hў)2]3/2
|
. |
|
|
|
| (42) |
Уравнение (34)
принимает вид
|
|
d(m0 vc)
dt
|
=- |
m0[(xў)2+(hў)2]3/2
|
, m0= |
ж
Ц
|
|
M+ |
b(xўh"-hўx")2
[(xў)2+(hў)2]3
|
|
. |
| (43) |
Величина m0 ни в
одной точке траектории не обращается в нуль, а для траекторий, не имеющих
особенностей, она будет также и ограничена. Отсюда видно, что увеличение
скорости движения на траектории достигается при
а уменьшение скорости
происходит при
Другими словами, если
траектория поворачивает справа налево относительно направления касательной, то
ускорение маховика должно быть отрицательным, а если слева направо, то -
положительным. Очевидно, что по абсолютной величине угловое ускорение
определяется требуемой величиной прироста скорости. При [(j)\ddot]
≡
0 скорость движения, вообще говоря, не будет
постоянной из-за изменения радиуса кривизны траектории:
где s - постоянная интеграла кинетического момента при [(j)\ddot]
≡
0.
Углы осей колесных пар
определены формулами
|
tgj2s=-tgj1s = |
a(xўh"-hўx")
[(xў)2+(hў)2]3/2
|
. |
| (44) |
Изменение параметра p
задается уравнением
Таким образом, система
уравнений (43), (42), (45) оказывается замкнутой. Для того, чтобы начать движение,
достаточно привязать траекторию к положению точки C на плоскости,
установить углы осей колес в соответствии с требуемым радиусом кривизны и
придать маховику угловое ускорение, противоположное по знаку радиусу кривизны.
Неизбежные ошибки в управлении осями колес приведут к искажению заданной
траектории движения. Однако, если не предъявлять сверхвысоких требований к
качеству реализации траектории, то траектория получаемого движения будет иметь
определенное сходство с заданной даже при отсутствии точной навигационной
привязки к местности. Отметим также, что при выполнении сложных траекторий
постоянное увеличение скорости не требуется, т.к. может возникнуть
проскальзывание колес относительно опорной поверхности.
В качестве примера получим
расчетные формулы движения по восьмерке, заданной уравнением
|
x = rcosp,
h = rsin2p,
r=const.
|
|
Предположим, что в начальный
момент движения p=0, точка C имеет координаты xc=r,
hc=0, а кроссбар ориентирован перпендикулярно оси Ox. Имеем
|
|
|
xў=-rsinp, hў=2rcos2p, x"=-rcosp, h" = -4rsin2p, |
|
|
xўh"-hўx"=2r2cosp(1+2sin2p), |
1
r
|
= |
2cosp(1+2sin2p)
r(sin2p+4cos22p)3/2
|
. |
|
|
|
|
Следовательно, в случае
разгона угловое ускорение маховика должно быть отрицательным при x > 0 и положительным при x < 0. Углы поворота осей колес определены формулами
|
tgj2s=-tgj1s = |
2acosp(1+2sin2p)
r(sin2p+4cos22p)3/2
|
. |
|
Они обращаются в нуль только
в точке x = h = 0. Видим, что формулы для расчета управления осями
колес оказываются непростыми. Проблема расчета управления осложнена еще и тем
обстоятельством, что текущее значение параметра p определено уравнением
(45).
3.3.с. Более простой
вариант расчета управления можно получить, если составить восьмерку из двух
окружностей одинакового радиуса r/2. Пусть одна из окружностей имеет
центр в точке с координатами x = r/2,
h = 0, а другая имеет центр в
точке с координатами x = -r/2, h = 0. Эти окружности касаются в точке x = h =
0. Параметрические уравнения кривой в целом имеют вид
|
2x = |
м
п
н
п
о
|
| , 2h = rsinp. |
| (46) |
Следовательно,
|
2xў= |
м
п
н
п
о
|
| , 2hў=rcosp, (xў)2+(hў)2= |
r2
4
|
. |
|
Далее
|
2x"= |
м
п
н
п
о
|
| 2h"=-rsinp, |
1
r
|
= |
м
п
н
п
о
|
| |
|
Задача управления. Точка C кроссбара должна двигаться по
траектории (46). В начальный момент времени t=t0
точка C имеет координаты x0=r,
h = 0. Ось Cx кроссбара
ориентирована в направлении оси Oh, а ось Cy направлена в сторону, противоположную оси Ox. Линейная скорость точки C в начальный момент
имеет величину vc=v0 и направлена вдоль оси
Cx. Требуется, чтобы скорость точки C достигла максимального
значения к моменту времени t=tf завершения движения по
восьмерке, когда робот вновь придет в исходную позицию. При этом в момент tf
угловая скорость маховика должна быть равна нулю. Полученное к моменту tf
угловое положение маховика не имеет значения.
Решение. Ограничим допустимые значения углового ускорения
маховика
Из-за того, что управление
входит линейно [golubev], максимальное приращение скорости достигается в режиме
релейного управления маховиком: [(j)\ddot]=▒e.
Следовательно, требование равенства нулю угловой скорости маховика в конце
маневра разгона кроссбара означает, что сумма интервалов времени, когда [(j)\ddot]=e, должно быть равно сумме интервалов времени, когда [(j)\ddot]=-e.
Уравнения (43)
вместе с (44) и (45), описывающие
процесс управления в режиме увеличения скорости, принимают вид
|
|
dvc
dt
|
= |
2Je
rm0
|
, tgj2s=-tgj1s= |
a
r
|
, |
Ч
p
|
= |
2vc
r
|
, m0= |
ж
Ц
|
|
. |
| (47) |
Таким образом, углы осей
колес оказываются кусочно-постоянными и задают радиус r = ▒r/2 кривизны траектории.
Центр кривизны совпадает с точками, имеющими координаты x = r/2, h = 0 и x = -r/2, h = 0 соответственно. Обозначим t время действия ненулевого ускорения маховика на
участке траектории при 0
≤
p
≤
p, а t1 > 0 разность времени действия ненулевого ускорения
при p < p
≤
3p и
времени t. Кроме того, пусть
|
t*=
|
v0rm0
Je
|
, T2=
|
pr2m0
2Je
|
.
|
|
Время t1
дополнительной работы маховика при p < p
≤
3p должно быть скомпенсировано при 3p < p
≤
4p. Поскольку действие ненулевого ускорения
маховика того или иного знака ограничено соответствующим участком постоянства
знака радиуса кривизны траектории, значения t и t1 стеснены системой неравенств
|
|
|
|
|
(t*+2t)(t+t1)+(t+t1)2
≤
2T2,
|
|
|
|
|
|
|
Эту систему с учетом того,
что по смыслу задачи должно быть t
≥
0, t1
≥
0, можно представить в эквивалентном виде
|
0
≤
t
≤
g1, 0
≤
t+t1
≤
g2, 0
≤
t1
≤
g3,
|
|
(48)
|
где
Величина t+t1 пропорциональна величине накопленной скорости за
время прохождения восьмерки. Нетрудно убедиться в том что функции g2(t) и g3(t)
монотонно убывают с ростом t.
Поэтому оптимальным в смысле максимума накопленной скорости будет значение t = 0. Кроме того, справедливо неравенство g2(0) > g3(0).
Следовательно, оптимальным будет значение
Найдем максимальное значение
скорости точки C в конце маневра:
где [`(t)]1
определено формулой (49). Суммируя результат решения
задачи, представим синтез оптимального закона управления маховиком.
|
|
ЧЧ
j
|
= |
м
п
п
н
п
п
о
|
| p1=p+ |
r
|
+ |
r2m0
|
< 3p. |
| (50) |
Выражение (50)
вместе с формулами (47) составляет оптимальный закон
управления снейкбордом в целом на выбранной траектории (46).
Может показаться
удивительным, что на первом участке траектории при 0
≤
p < p управление маховиком вообще отсутствует. Особенно это кажется странным
при v0=0. Тогда точка C вообще не может сдвинуться с
места. В случае v0=0 закон управления (50)
следует рассматривать как предельный при
t
→
0. Практически это означает, что при v0=0
следует дать ускорение маховика на очень коротком интервале времени, а затем
подождать, когда точка C попадет на участок траектории с отрицательным
значением кривизны. Отмеченная особенность оптимального управления связана с
тем, что при увеличении скорости входа на участок с отрицательной кривизной
время для управления маховиком на этом участке уменьшается. При этом суммарные
времена пребывания точки C на участках с положительной и отрицательной
кривизнами должны совпадать. Обсуждаемая особенность оптимального управления
будет отсутствовать, если начальное положение точки C совместить с
началом координат.
Обозначим k номер
прохождения одного цикла движения по "восьмерке". Тогда
последовательность значений величины t*k, соответствующих начальным скоростям вхождения в
цикл, можно представить в рекуррентном виде
Полученная последовательность
расходится при k
→∞
.
Отсюда следует, что, используя полученный закон управления на
последовательности прохождения циклов движения по восьмерке, можно получить
любую заданную скорость движения. Препятствовать этому может лишь опасность
возникновения проскальзывания колес по опорной плоскости.
Заключение
В работе изучена динамика
управляемого движения робота-снейкбордиста - неголономной механической системы,
имеющей достаточно сложную кинематическую конфигурацию, включающую снейкборд и
расположенный на нем маховик. В основу исследования положено уравнение
кинетического момента снейкборда относительно подвижного мгновенного центра
скоростей его кроссбара. Получены следующие результаты
1. На основе кинематического
анализа системы предложены алгоритмы отслеживания произвольной достаточно
гладкой трассы заданной точкой кроссбара при ненулевом значении скорости этой
точки за счет управления осями колес.
2. С использованием уравнения
кинетического момента изучены консервативные алгоритмы управления угловой
скоростью маховика для возможности перемещения по заданной траектории центра
кроссбара.
3. Сформулирован и обоснован
принцип управления угловым ускорением маховика, обеспечивающий монотонное
возрастание линейной скорости центра кроссбара на заданной траектории движения.
Построено управление угловым ускорением маховика с целью разгона робота на
волнообразной траектории с прямолинейной осью, сохраняющее нулевую в среднем
угловую скорость маховика.
4. Решена задача о
максимальном приросте скорости за счет углового ускорения маховика на
траектории типа "восьмерка", состоящей из двух касающихся
окружностей, при условии, что в начале и в конце маневра угловая скорость
маховика равна нулю.
References
[www]
http://www.snakeboarder.com
[lewis]
Lewis A.D.,
Ostrowski J.P., Murray R.M. and Burdick J.W. Nonholonomic
mechanics and locomotion: the Snakeboard example// Proc. of the IEEE ICRA, San
Diego, May 1994. IEEE, pp 2391-2400.
[kuleshov]
Кулешов А.С.
Элементарное изложение динамики снейкборда. Мобильные роботы и мехатронные
системы: материалы научной школы-конференции (Москва, 17-18 ноября 2003).- М.:
Изд-во Моск. ун-та, 2004. С. 159-166.
[golubev1]
Голубев Ю.Ф.
Механические системы с сервосвязями.-М.: Наука. ПММ, т. 65 вып.2,
2001.-с. 211-224.
[golubev3]
Голубев Ю.Ф.
Движение с постоянным модулем скорости в центральном поле тяготения. ПММ,т.66,
вып.6, с.1052-1065, 2002.
[okh]
Охоцимский Д.Е.,
Гришин А.А., Ленский А.В., Панин Д.А., Формальский А.М. О
синтезе управления неустойчивым объектом. Перевернутый маятник. Известия РАН,
Теория и системы управления, 5, 2002.-с.
[golubev2]
Голубев Ю.Ф.
Робот-эквилибрист на цилиндре. ПММ,т.67,вып.4, с. 603-619, 2003.
[golubev]
Голубев Ю.Ф.
Основы теоретической механики: Учебник. 2-е изд., перераб. и дополн.-М.: Изд-во
МГУ,2000.-719 с.
File translated from TEX
by TTH, version
3.40.
On 09 Feb 2005, 15:19.
|