Аннотация
Описывается программный комплекс автоматического визуального мониторинга процесса сближения
и стыковки космических кораблей «Прогресс» с Международной космической станцией. Исходной
информацией служит видеосигнал, идущий от телекамеры на борту корабля. Получаемая
последовательность кадров обрабатывается в реальном времени. В каждом кадре выделяются
детали специальной мишени, размеры которых и геометрические параметры взаимного расположения
используются как первичные измерения. По этим измерениям восстанавливается движение корабля
относительно станции. Приводятся примеры обработки реальных видеоданных, полученных в процессе
сближения и стыковки. Обсуждаются точность восстановления движения корабля и перспективы
развития программного комплекса.
Abstract
The software package is described which intended for the automatic visual monitoring of a
spacecraft Progress docking to International Space Station. Initial information for the
software is a video signal received from the TV-camera, mounted on the spacecraft board.
An obtained sequence of frames is processed in real time. In each frame, the software finds
out the details of the special target and determines geometric parameters of their mutual
arrangement. Values of those parameters are used as primary measurements for determining
the spacecraft motion relative to the station. The examples are given for processing the real
video data obtained during the spacecraft Progress docking to International Space Station.
The accuracy of the estimation of the motion and perspectives of the use of the software
are discussed.
1. Введение
Одной из наиболее трудных и
важных стадий управления полетом космических кораблей «Союз» и «Прогресс»
является их стыковка с орбитальной станцией. Радиотехнические средства
управления стыковкой, используемые в течение многих лет в отечественной
космической практике, очень дороги и не позволяют стыковаться с некооперируемой
станцией. Применяются также ручные методы, в которых в качестве одного из
оптических вспомогательных средств используется телекамера. В частности, при
стыковках беспилотных кораблей «Прогресс» с орбитальной станцией «Мир»
применялся так называемый телеоператорный режим управления в котором космонавт
на станции управляет стыкующимся с ней кораблем руководствуясь телевизионным изображением
станции, получаемым от телекамеры, установленной на корабле.
В Центре управления полетами
имеются средства контроля параметров относительного движения объектов при
стыковке (дальность, скорость, угловые отклонения). Применяются
полуавтоматические средства, использующие телевизионные системы 60-х годов и не
удовлетворяющие современным требованиям. В настоящее время имеются и технические
средства получения видеоинформации и способы ее обработки, позволяющие проводить
мониторинг стыковки на более высоком уровне. Ниже описывается программный
комплекс автоматизированного
визуального мониторинга процесса стыковки космических кораблей с Международной
космической станцией (далее для краткости – комплекс), позволяющий в
автоматическом режиме и реальном времени определять движение корабля
относительно станции.
Комплекс реализован на ЭВМ
типа IBM PC. Исходной информацией для
комплекса служит передаваемое на Землю телевизионное изображение станции в
ТВ-камере на борту корабля. ТВ-сигнал вводится в ЭВМ с помощью устройства ввода
зрительных данных. Кроме того, предусмотрена возможность обработки уже
оцифрованных последовательностей изображений формата AVI. Весь комплекс реализован в
среде ОС Windows 98-XP.
Конечная
цель разработки комплекса состоит в полной автоматизации визуального слежения
за процессом сближения корабля и станции, начиная с момента видимости станции в
поле зрения ТВ-камеры (около 500
м) до окончания стыковки. Однако возможности
используемой в настоящее время видеосистемы более скромные. На расстоянии менее
15 м от
станции параметры положения корабля относительно нее, а именно, координаты
фокуса камеры и ориентация связанной с камерой системы координат, полностью
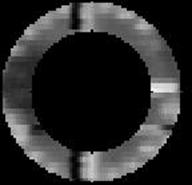
определяется по параметрам изображения специальной мишени. Мишень представляет
собой окружность с внешним радиусом 0.4 м, образованную белыми метками в виде
квадратов и прямоугольников. Окружность расположена рядом со стыковочным узлом
на торце Служебного модуля. Плоскость мишени совпадает с плоскостью этого
торца. В центре мишени перпендикулярно ее плоскости расположен стержень длиной 0.6 м. На конце стержня
установлен прямой крест. Плоскость креста параллельна плоскости мишени, размах
каждой его перекладины – 0.2 м.
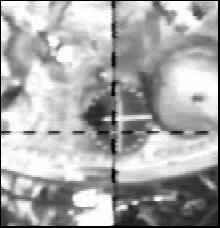
Видеоизображение мишени и креста показано на приводимом ниже рис. 2.
При
идеальной стыковке центр креста на видеоизображении должен совпадать с центром
мишени, а концы перекладин креста – находиться против выделенных меток в форме
прямоугольников. В реальном процессе (ср. рис. 2) эта конфигурация нарушена.
Оказывается, по размеру мишени, по горизонтальному и вертикальному смещениям ее
центра относительно центра креста на видеоизображении можно найти положение
фокуса камеры относительно станции. По смещениям центра мишени относительно
центра кадра и по углу поворота креста относительно границ кадра можно найти
три угла, задающие ориентацию связанной с камерой системы координат
относительно системы координат станции. Таким образом, вблизи станции
видеоизображение мишени и креста дает исчерпывающую информацию о положении
корабля. Имея последовательность кадров с измерениями указанных смещений и
углов, можно восстановить и движение корабля относительно станции.
На
расстоянии более 15 м
по видеоизображению достаточно надежно определяется только расстояние между
кораблем и станцией. Такое определение выполняется по размеру окружности,
являющейся изображением торца Служебного модуля, при дополнительном
предположении, что этот торец расположен примерно перпендикулярно оптической
оси камеры. Иными словами, продольные оси Служебного модуля и корабля
параллельны. Раз уж такое предположение принято, то естественно принять, что
соответствующие оси систем координат мишени и камеры параллельны. Анализ
большого числа стыковок показывает, что такое предположение допустимо. В его
рамках удается восстановить движение центра масс корабля относительно станции.
Опишем
работу комплекса. Основные этапы сбора и обработки зрительных данных в
комплексе реализованы подобно действиям оператора-человека.
В
предъявленном поле зрения:
Ø
выделяется объект интереса (в зависимости от
дальности наблюдения им может быть либо вся станция целиком, либо стыковочный
узел, либо специальная мишень для прицеливания);
Ø
определяются его характерные элементы, образы
которых хорошо различимы на изображении (измерительная часть);
на
основе полученных данных:
Ø
определяется положение этих элементов
относительно системы координат, связанной с изображением; для оператора это
перекрестие визира (измерительная часть);
Ø
вычисляются параметры, характеризующие
относительное расположение корабля и станции (расчетная часть).
Ø
Дополнительно к действиям оператора-человека
комплекс вычисляет и отображает в принятом для анализа виде параметры, характеризующие
процесс стыковки.
2. Измерительная
часть
Целью этой части
комплекса является определение координат точек и характерных размеров объектов
интереса на изображении. Достижение этой цели разбивается на четыре задачи:
1. выделение области интереса
в очередном цифровом изображении;
2. предобработка зрительных
данных в области интереса;
3. выделение объектов интереса;
4. определение координат
заданных точек на объектах интереса.
Обеспечение надежности. Для надежного выделения
образов объектов-ориентиров на изображении используются следующие приемы:
Ø
настройка яркости и контрастности анализируемого изображения – оптимальных
с точки зрения выделения интересующих объектов.
Ø
резервное дублирование и троирование ориентиров, выделение которых
необходимо для надежной работы
комплекса.
Ø
самоконтроль системы на основе априорной информации.
Система координат изображения. Положение образов объектов
интереса и их частей задаются в системе координат, связанной с изображением
(рис. 1). В качестве единицы измерения длины берется расстояние между двумя соседними
элементами цифрового изображения – пикселами.
Ø
заданием области интереса (Рис. 2) извне (на основе информации,
полученной на предыдущих этапах решения задачи слежения или указанной
оператором);
Ø
вычислением координат и размеров области
интереса на основе информации, полученной в ходе измерений на предыдущих кадрах
видеоданных.
Вторая
задача решается на основе анализа гистограммы, характеризующей распределение
точек области интереса по уровням яркости. Ее вид должен допускать надежный переход
к бинарному изображению. В рассматриваемой задаче это бимодальность. Управление
видом гистограммы достигается с помощью регулировок яркости и контраста устройства
ввода видеосигнала в ЭВМ. (Рис. 2, пример гистограммы области интереса).
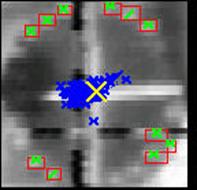
Третья
задача. В качестве объектов интереса в процессе сближения корабля и станции
выбраны внешний обвод станции, диск стыковочного узла, крест на стержне перед
мишенью для прицеливания и сам мишень.
Характерными
элементами – ориентирами, определяемыми на образах этих объектов на изображении,
являются край станции, крест и деления мишени.
Четвертая задача –
определение координат заданных точек на объектах интереса – представляет собой
чисто техническую операцию выбора требуемых координат.
3. Расчетная
часть
Измерительная информация, полученная в результате обработки одного телевизионного
полукадра кадра, имеет вид:
 – время привязки
полукадра (в секундах от начала видеоклипа); – время привязки
полукадра (в секундах от начала видеоклипа);
 – координаты центра
креста (действительные числа); – координаты центра
креста (действительные числа);
 – количество точек на
верхней/нижней горизонтальной стороне креста (целое число); – количество точек на
верхней/нижней горизонтальной стороне креста (целое число);
  – координаты точек на
верхней горизонтальной стороне креста (целые числа – координаты точек на
верхней горизонтальной стороне креста (целые числа – координаты точек на
нижней горизонтальной стороне креста (целые числа); – координаты точек на
нижней горизонтальной стороне креста (целые числа);
 – координаты точек); – координаты точек);
на левой/правой вертикальной
стороне креста (целые числа);
  – координаты точек на
левой вертикальной стороне креста и их координаты (целые числа); – координаты точек на
левой вертикальной стороне креста и их координаты (целые числа);
 – координаты точек на
правой вертикальной стороне креста (целые числа); – координаты точек на
правой вертикальной стороне креста (целые числа);
 – координаты центра
окружности мишени и ее радиус (действительные числа); – координаты центра
окружности мишени и ее радиус (действительные числа);
 – количество точек на
окружности мишени и их координаты (целые числа); – количество точек на
окружности мишени и их координаты (целые числа);
 – координаты центра
внешнего обода станции (окружности) и ее радиус (действительные числа). – координаты центра
внешнего обода станции (окружности) и ее радиус (действительные числа).
Здесь все координаты
выражены в пикселах. Некоторые из чисел ,
и  могут быть нулевыми.
Например, равенство могут быть нулевыми.
Например, равенство  означает отсутствие
данных означает отсутствие
данных  , ,  . Несмотря на то, что результаты обработки кадра – величины и – в указанных данных
имеются, в процедуре определения движения эти величины, если имеется возможность
(при положительных соответствующих . Несмотря на то, что результаты обработки кадра – величины и – в указанных данных
имеются, в процедуре определения движения эти величины, если имеется возможность
(при положительных соответствующих  ), находятся независимо по исходной информации. Описываемые
ниже вычисления параметров креста и мишени относятся к случаю, когда в исходных
данных соответствующие ), находятся независимо по исходной информации. Описываемые
ниже вычисления параметров креста и мишени относятся к случаю, когда в исходных
данных соответствующие  и и  . Последние соотношения служат ключами к анализу входной
информации. . Последние соотношения служат ключами к анализу входной
информации.
Определение координат центра креста. После преобразования данных
 , ,  ( ( ) )
точки  лежат на средней линии
горизонтальной полосы креста, точки лежат на средней линии
горизонтальной полосы креста, точки  – на средней линии
вертикальной полосы креста. Уравнения этих линий запишем в виде: – на средней линии
вертикальной полосы креста. Уравнения этих линий запишем в виде:  (горизонтальная), (горизонтальная),  (вертикальная). Здесь (вертикальная). Здесь  , ,  и и  – коэффициенты. На
самом деле угол между средними линиями полос креста отличен от прямого, но это
отличие – эффект второго порядка, который при имеющемся качестве изображения
незаметен. Значения коэффициентов , и находятся методом
наименьших квадратов из условия – коэффициенты. На
самом деле угол между средними линиями полос креста отличен от прямого, но это
отличие – эффект второго порядка, который при имеющемся качестве изображения
незаметен. Значения коэффициентов , и находятся методом
наименьших квадратов из условия
 по по  . .
Для определения этих коэффициентов получаем линейную
систему. Центр креста – точка пересечения указанных средних линий – имеет координаты
 , ,  . .
Как правило, рассогласования
 и и  не превышают 1.5
пикселов. При определении движения используются величины , не превышают 1.5
пикселов. При определении движения используются величины ,  и и  . .
Определение координат центра окружности мишени и ее радиуса. Рассматривается
множество   точек мишени.
Находится пара точек точек мишени.
Находится пара точек  и и  , на которой реализуется диаметр этого множества. Находится
вторая пара точек , на которой реализуется диаметр этого множества. Находится
вторая пара точек  и и  , на которой реализуется диаметр множества, являющегося
проекцией множества , на которой реализуется диаметр множества, являющегося
проекцией множества  на прямую,
перпендикулярную отрезку на прямую,
перпендикулярную отрезку  . Отрезки и . Отрезки и  рассматриваются как
хорды одной и той же окружности. Через центр каждой хорды проводится
перпендикуляр, и находится точка пересечения этих перпендикуляров – первое приближение
центра окружности мишени. Координаты последней точки обозначим рассматриваются как
хорды одной и той же окружности. Через центр каждой хорды проводится
перпендикуляр, и находится точка пересечения этих перпендикуляров – первое приближение
центра окружности мишени. Координаты последней точки обозначим  . Первое приближение радиуса окружности мишени находится по
формуле . Первое приближение радиуса окружности мишени находится по
формуле
 . .
Окончательные значения
координат центра окружности и ее радиуса находятся методом наименьших квадратов
из условия
 по по  . .
Сформулированная задача решается по схеме
Гаусса-Ньютона [1]. Ее решение обозначим  , ,  и и  . Как правило, рассогласования . Как правило, рассогласования  , ,  и и  не превышают 1.5
пикселов. При определении движения используются величины не превышают 1.5
пикселов. При определении движения используются величины  , ,  и и  . Ниже для простоты записи звездочки у перевычисленных
параметров изображения не указываются. . Ниже для простоты записи звездочки у перевычисленных
параметров изображения не указываются.
Основные геометрические соотношения. С мишенью свяжем правую декартову систему
координат  . Точка . Точка  – центр мишени, ось – центр мишени, ось  направлена перпендикулярно
плоскости мишени в сторону от станции, т. е. параллельна продольной оси Служебного
модуля, ось направлена перпендикулярно
плоскости мишени в сторону от станции, т. е. параллельна продольной оси Служебного
модуля, ось  пересекает ось стыковочного
узла Служебного модуля. пересекает ось стыковочного
узла Служебного модуля.
С камерой корабля свяжем
правую декартову систему координат  . Плоскость . Плоскость  совпадает с картинной
плоскостью камеры, ось совпадает с картинной
плоскостью камеры, ось  совпадает с оптической
осью камеры и направлена по движению корабля, ось совпадает с оптической
осью камеры и направлена по движению корабля, ось  пересекает ось
стыковочного узла корабля. Матрицу перехода от системы к системе обозначим пересекает ось
стыковочного узла корабля. Матрицу перехода от системы к системе обозначим  , где , где  – косинус угла между
осями – косинус угла между
осями  и и  . Формулы перехода между этими системами координат имеют вид . Формулы перехода между этими системами координат имеют вид
  , ,   . .
Здесь
 – координаты точки – координаты точки  в системе . в системе .
Идеальная стыковка
характеризуется матрицей  . При реальной стыковке матрица перехода представляется
следующим образом . При реальной стыковке матрица перехода представляется
следующим образом
 . .
Здесь  – компоненты вектора
бесконечно малого поворота системы относительно ее
положения при идеальной стыковке. Полагаем, что отклонения от идеальной
стыковки малы. – компоненты вектора
бесконечно малого поворота системы относительно ее
положения при идеальной стыковке. Полагаем, что отклонения от идеальной
стыковки малы.
Если
некоторая точка имеет в системе координаты  , то координаты изображения этой точки в картинной плоскости
камеры будут , то координаты изображения этой точки в картинной плоскости
камеры будут
 , ,  . .
Здесь  – фокусное расстояние
камеры. Именно координаты – фокусное расстояние
камеры. Именно координаты  и и  , выраженные в пикселах, имелись в виду при описании
обработки отдельного кадра видеоизображения (см. выше). Пусть координаты той же
точки в системе будут , выраженные в пикселах, имелись в виду при описании
обработки отдельного кадра видеоизображения (см. выше). Пусть координаты той же
точки в системе будут  . Тогда . Тогда
  . .
5. Заключение
Описанная
система в настоящее время используется как средство, позволяющее наземным
операторам получать информацию о параметрах движения стыкующегося корабля в
реальном времени. Наиболее существенная часть этой информации передается на
Землю (и всегда передавалась) по телеметрическому каналу. Она также
высвечивается на дисплее. Однако эта так называемая штатная информация
относится к текущему моменту времени и без дополнительной обработки не может
дать целостной картины процесса стыковки. Такая дополнительная обработка
организационно гораздо сложнее и дороже обработки видеоизображения. Следует
отметить, что определение параметров движущихся объектов по видеоизображению в
настоящее время становится наиболее доступным и универсальным средством решения
задач такого рода в ситуациях, когда цена отказа сравнительно невелика. Оно
находит широкое применение в быту и технике, в частности, в автоматическом мониторинге
скоростей автомобилей, автоматическом управлении роботами и т. п. В ближайшем будущем
можно ожидать вовлечения в сферу применения этого подхода задач, решение
которых требует определенной надежности.
Данная
работа выполнена при поддержке РФФИ (проекты 04-01-00475, 02-01-00671,
02-07-90425).
Литература
1. Бард
Й. Нелинейное оценивание параметров. М., «Статистика», 1979.
2. Себер Дж. Линейный
регрессионный анализ. М., «Мир», 1980.
3. Эльясберг П.В. Определение
движения по результатам измерений. М., «Наука», 1976.
Рисунки
    

а)
б)
Рис. 2. Пример выделения области интереса в поле
зрения ТВ-камеры, расположенной на
корабле; а) - все поле зрения; б) - область интереса.
Рис. 3. Выделение креста из всех кандидатов на основе
априорной информации: размеров планок креста и их взаимного пересечения.
Рис. 4. Пример выделения образа мишени на основе
найденных координат креста и априорной информации о расположении меток мишени:
а) определение области интереса на основе априорной информации и найденного
положения центра креста; б) уточнение области мишени диагональными пробниками;
в) область интереса для поиска меток мишени; г) результат выделения меток мишени.
Рис.5. Пример выделения края внешнего обвода
станции. а) - слева; б) - по центру; в) - справа.
|
 ,
, .
. ,
, .
. ,
, .
. ,
, .
. .
.
 .
. ,
, ,
,
 .
.
 ,
, ,
, ,
, .
. ,
, .
. ,
, .
.
 ,
,
 ,
, ,
, .
.