|
УДК 531.8 УПРАВЛЕНИЕ
РУКОЯТКОЙ С ОТОБРАЖЕНИЕМ ИСПОЛНЕНИЯ ДВИЖЕНИЯ © Москва, Институт прикладной математики РАН Поступила в редакцию 01.05.04 г. Аннотация Описывается рукоятка с отображением исполнения движения. Рукоятка
обеспечивает задание движения по шести степеням свободы от шестикомпонентного
датчика силы и отображение исполнения движения с помощью подвижной платформы,
которой касается кисть руки. Информацию об исполнении движения оператор
воспринимает через кожу кисти, ощущая вектор и величину отклонения платформы от
начального положения. Отличие конструкции рукоятки от существующих устройств
шестикомпонентного управления с отображением усилий состоит в том, что органы
задания и отображения движения кинематически не связаны. Вследствие этого
перемещение платформы практически не влияет на работу задающей части рукоятки,
что позволяет качественно воспроизводить даже малые отклонения в заданном
движении. CONTROL OF JOYSTICK WITH FEEDBACK ON DEVIATION OF OBJECT POSITION
V Kartashev, vakart@keldysh.ru
Keldysh institute for Applied Mathematics of RAS The joystick with feedback on deviation of object position is
described. It supports control and reflection of deviation from given motion on 6
degree of freedoms. Sensor part uses 6 component force sensor. Movable part
consists of the platform. Operator hand feels displacements of the platform as
deviations between real and given motion. Experiments show that this scheme
excludes oscillations of moveable part because it is not connected mechanically
with sensor one.
ВВЕДЕНИЕ Разработка различных способов отображения информации о движении является актуальной задачей дистанционного управления механическими объектами. Многообразие условий применения дистанционного управления делает целесообразным развитие различных способов отображения информации о движении. Для управления перемещениями в контакте с рабочей средой наибольшее распространение получили манипуляторы, на конце которых находится рукоятка управления [1-7]. Возникновение препятствия движению имитируется приводами манипулятора путем торможения движения рукоятки. Например, широко известные манипуляторы PHANTOM с отражением усилий фирмы SensAble Technologies [2] рис. 1. Манипулятор имеет антропоморфную кинематическую схему. При перемещении оператором рукоятки изменяются углы в суставах основания. Если препятствие отсутствует, то управление на приводы не подается. Для того, чтобы обозначить возникновение препятствия, система управления включает приводы, которые тормозят дальнейшее движение. Простая конструкция приводов торможения делает такие рукоятки достаточно дешевыми. Например, рукоятка Wingman фирмы Logitech, которая имеет две степени свободы, используется для введения элементов виртуальной реальности в компьютерные игры. Недостатком таких рукояток является невысокая точность отображения геометрии препятствия. Действительно, для того, чтобы определить направление движения руки должна быть обеспечена некоторая свобода движения. Следовательно, рука должна иметь возможность смещаться даже в направлении препятствия. Если мы захотим двигаться вдоль препятствия, оказывая некоторое давление на него, то возникнет противоречие, так как для того, чтобы осуществить такое движение степени подвижности должны быть освобождены, однако имитация сопротивления со стороны препятствия приведет к блокировке приводов. Необходимость выполнения перемещений с оказанием давления на рабочую среду возникает во многих задачах дистанционного управления манипуляторами, например, при сборке, шлифовке или резке. Другим способом реализации отражения усилий сопротивления движению является использование электромеханического манипулятора, на котором вместо схвата установлен силоизмерительный датчик [5,6,8] (рис. 3). Этот способ позволяет точнее выполнять движение вдоль границы препятствия. Недостаток его заключается в том, что движение манипулятора происходит с ощутимыми автоколебаниями, что затрудняет работу оператора. Условия для автоколебаний возникают в связи с тем, что величина перемещения рукоятки пропорциональна оказываемой на нее силе. В настоящей работе рассматривается рукоятка, в которой движение задается с помощью шестикомпонентного датчика силы, а исполнение движения отображается через перемещение платформы, воспринимаемое тактильной чувствительностью кисти руки рис. 3. Разделение задающей и отображающей частей позволяет избегать отмеченных недостатков как рукояток первого, так и рукояток второго типа. Кроме того, дополнительно появляется возможность оперативного определения величины отклонения от заданного движения, так как кисть руки и кончики пальцев достаточно хорошо ощущают смещение платформы относительно исходного положения. Достоинством разработанной конструкции является возможность ее миниатюризации при использовании малогабаритных двигателей, так как на отображающую платформу не действует сила тяжести руки. С учетом этого оказывается возможным использование редукторов с малым коэффициентом редукции, что уменьшит задержки и увеличит точность в отработке заданного движения платформы. КОНСТРУКЦИЯ РУКОЯТКИ Конструкция рукоятки состоит из двух частей: измерительной и исполнительной. Измерительная часть представляет собой цилиндр, на котором укреплен шестикомпонентный силоизмерительный датчик и сфера (рис. 4). Оператор кистью задает движение объекта, надавливая и поворачивая сферу. Возникающие при этом сила и момент интерпретируются системой управления как величины перемещений и поворота объекта управления. Исполнительная часть состоит из механизма, называемого гексаподом. Он представляет собой основание, шесть двигателей и тяги, которые поддерживают платформу. Обычно тяги гепсаподов выполняются на приводах линейного перемещения. С целью упрощения конструкции рукоятки гексапод исполнительной части реализован на приводах вращения. Кинематическая схема исполнительной части показана на рис. 5. Преимущество использования вращательных приводов заключается также в том, что они позволяют миниатюризировать конструкцию платформы. Платформа покрыта ворсистым материалом для того, чтобы улучшить контакт кожи кисти с платформой, на которую она опирается. В качестве двигателей использовались шаговые двигатели РР520 и редукторы с коэффициентом редукции 140 фирмы ESCAPE. Управление вращением двигателей осуществлялось от контроллеров EDM-483 той же фирмы.
СИСТЕМА УПРАВЛЕНИЯ Блок-схема системы управления показана на рис. 3. Система управления состоит из двух частей: задающей и отображающей. Задающая часть обеспечивает измерение векторов результирующей силы и момента воздействия оператора на рукоятку, приведение их к центру сферы и расчет управляющих воздействий на объект управления. Отображающая часть осуществляет управление платформой, обеспечивая отображение исполнения заданного движения. Рассмотрим работу каждой из частей подробнее. Задающая часть. Измеряет три компоненты силы и три компоненты момента в осях OXYZ, с которой рука оператора воздействует на сферу. Компоненты момента относительно осей OX и OY пересчитываются к центру сферы по формулам: MSX = MOX – SO×FY, MSY = MOY
– SO×FX. Здесь MSX и MSY - моменты, приведенные к центру сферы, FX и FY – компоненты силы воздействия оператора на сферу, SO – расстояние от центра сферы до силоизмерительного датчика. Пересчет выполняется для того, чтобы свести к минимуму зависимость этих моментов относительно компонент силы FX и FY , так как направления воздействия руки на сферу при создании силы и момента совпадают. Для того, чтобы компенсировать действие веса руки оператора на датчик, из измеренного значения вертикальной составляющей силы FOZ вычитается константа: FSZ = FOZ - PZ
. Вычисленные значения сил FSX, FSY, FSZ и моментов MSX, MSY, MSZ умножаются на константы (масштабируются) и поступают на выход системы управления в качестве управляющих воздействий UFX, UFY, UFZ, UMX, UMY, UMZ на объект управления: UFX = aFX FSX, UFY = aFY FSY, UFZ = aFZ FSZ, UMX =
aMX MSX, UMY = aMY MSY, UMZ = aMZ MSZ. Масштабирование позволяет скорректировать неравномерность воздействия руки на сферу по различным компонентам силы и момента. Настройка коэффициентов a осуществляется с помощью графического интерфейса. Отображающая часть. Входящие в систему сигналы отклонения по положению и углу поворота объекта масштабируются. di = li diвх, (i = 1,…,6), где diвх - отклонения объекта управления по положению и углами относительно абсолютных осей: d1вх
= rXо, d2вх
= rYо, d3вх
= rZо, d4вх
= jXо, d5вх
= jYо, d6вх
= jZо; di - смещение и поворот платформы в абсолютных осях: d1 = rX, d2 = rY, d3 = rZ, d4 = jX, d5 = jY, d6 = jZ. Здесь (rX, rY,rZ) - вектор смещения начала системы координат, жестко связанной с платформой, (jX, jY, jZ) – углы поворота относительно осей. Настройка коэффициентов l осуществляется с помощью графического интерфейса. Привод платформы, реализованный в виде гексапода, имеет нелинейную кинематическую схему. Точное перемещение платформы по любой из осей требует сложных преобразований координат. Однако, как показало использование рукоятки, кинематические ограничения в суставах кисти не позволяют оператору с приемлемой точностью задавать большие отклонения от нейтрального положения. В малых приращениях зависимость между управляющим усилием и положением платформы является линейной: w = А d, где w = (w1 , w2, , w3 , w4 , w5 , w6) - вектор углов поворота валов двигателей в приводах гексапода, d = (d1 , d2, , d3 , d4 , d5 , d6) - вектор смещений и поворотов платформы в абсолютных осях, А – матрица коэффициентов зависимостей между отклонениями и углами поворота валов двигателей. Их величины устанавливаются оператором при настройке системы управления. Процедура настройки оказывается следующей. Сначала платформа выводится в нейтральное положение, которое соответствует такому положению, когда управляющие усилия, воздействующие на сферу равны нулю. При этом силоизмерительный датчик выключен, а кисть оператора касается платформы. Положения валов приводов запоминаются. Затем платформа поочередно смещается в направлении каждой оси на небольшой отрезок длины Ri и поворачивается относительно оси на небольшой угол gi (i = 1, 2, 3). Изменения в углах поворота валов приводов eij (j = 1,…,6) в каждом из шести экспериментов запоминаются. Таким образом, углы поворота валов приводов связаны с требуемым смещением центра платформы и поворота относительно ее осей с линейной зависимостью: wi = УПРАВЛЕНИЕ РУКОЯТКОЙ Настройка рукоятки и оценка качества ее работы осуществлялись в эксперименте, в котором объектом управления служит сама платформа. Для этого сигналы управления сформированные на выходе измерительной части, подавались на вход отображающей части. Таким образом, управляющие усилие и момент, с которыми оператор воздействует на сферу, интерпретировались как величины смещения и поворота платформы: d1 = UFX, d2 = UFY, d3 = UFZ, d4 = UMX, d5 = UMY , d6 = UMZ. Эксперименты показали, что
при малых отклонениях платформа достаточно точно воспроизводит плавное движение
кисти оператора, которые она совершает за счет упругости кожи при воздействии
на сферу. При резких воздействиях на рукоятку запаздывание, вызванное
обработкой заданного движения, приводит к заметным ошибкам. Эти отклонения
ощущаются как исполнение объектом управления заданного движения. После
отработки заданного перемещения платформа выходила в требуемую позицию, что
субъективно воспринималось как отсутствие рассогласования в положении платформы
и кисти оператора. ВЫВОДЫ Необходимость разработки таких средств управления, которые создавали бы у оператора иллюзию движения объекта, является актуальной задачей дистанционного управления. Необходимость в такой системе возникает всегда, когда требуется обеспечить движение механической системы во взаимодействии с окружающей средой. Однако удовлетворительного решения этой задачи до сих пор не найдено. В сравнении с копирующими манипуляторами, в которых обратная связь с исполнением движения осуществляется механически, качество обратной связи электромеханических систем пока несравнимо хуже. В настоящее время системы управления с электромеханической обратной связью строятся на основе манипуляционного устройства, в котором имеется прямая механическая связь с исполнительным устройством. Наличие такой связи ведет к известным недостаткам в работе таких устройств. В предложенной конструкции задающая и исполняющая части рукоятки не связаны механически друг с другом. Эксперименты показали, что это позволяет избежать имеющихся недостатков при отображении исполнения объектом управления заданного движения по шести степеням свободы. Характеристики рукоятки могут быть улучшены при уменьшении ее размеров, допускаемое найденными техническими решениями, увеличении точности движения платформы путем использования контурного управления и уменьшении времени реакции за счет уменьшения коэффициентов редукции приводов. Литература URL: www.spacemouse.com. 2. SensAble Technologies, Product Literature, URL: www.sensable.com См. также Massie, T.M. and Salisbury, J.K., "The PHANToM Haptic Interface: A Device for Probing Virtual Objects," in 3rd Annual Symp. Haptic Interfaces for Virtual Environment and Teleoperator Systems, (Chicago, IL), 1994, DSC-Vol 1, pp. 295-301. 3. Logitech Wingman, Product Literature, URL: www.logitech.com. 4. Laparascopic Impulse Engine. Immersion
Corporation, Product Literature, URL: www.immerse.com. См. также
Rosenberg, L.B. Virtual Fixtures: Perceptual Tools for Telerobotic
Manipulation. Proceedings IEEE Virtual Reality Annual International Symposium,
1993. 5. CybernetImpact, CybernetDevices,Inc., Product Literature, URL: www.cybernetdevices.com. 6. Dextrous Master SarcosDevice, Inc., Product Literature, URL: www.sarcosdevice.com. См. также Jacobsen, S.C., Smith, F.M., Iversen, E.K.,
and Backman, D.K., 1990, "High Performance, High Dexterity, Force
Reflective Teleoperator," in Proc. 38th Conf. Remote Systems
Technology, (Washington, D.C.), pp. 180-185. 7. Direct Drive Force Feedback Joystick, EngineeringMatter, Inc.,
Product Literature, URL: www.engineeringmatters.com. 8. В.А.Карташев, А.В.Ленский, А.Ю.Шнейдер. Силовая обратная связь в системе управления шагающим аппаратом. Ст. в сб. Исследование робототехнических систем. М., Наука,1983. Рисунки
Рис.1 Рис.2
Рис.3 Рис.4 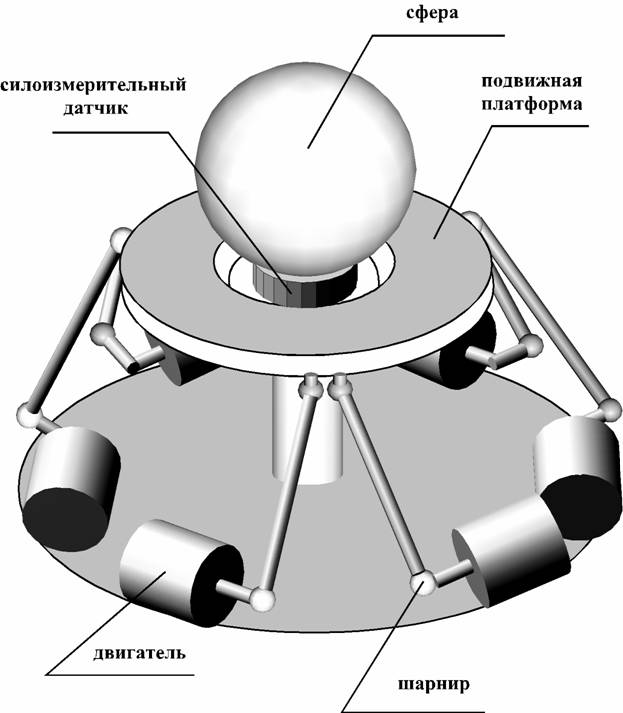 Рис.5 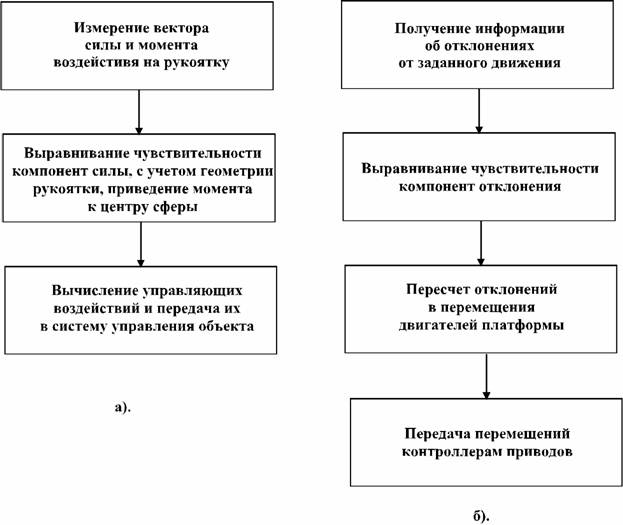 Рис. 6. Блок-схема системы управления рукояткой: а). задающая часть, б). отображающая часть |



