Равновесия и устойчивость спутника-гиростата с вектором гиростатического момента
в главной плоскости инерции спутника
|
Препринт
является продолжением серии работ, посвященных анализу равновесных конфигураций
спутника-гиростата на круговой орбите. В [1,2] показано, что в случае, когда вектор внутреннего
гиростатического момента коллинеарен одной из главных центральных осей инерции
спутника, на круговой орбите существует от 8 до 24 изолированных положений
равновесия. Найдены шесть групп изолированных решений, каждая из которых
описывает четыре положения равновесия спутника. Получены как достаточные, так и
необходимые условия устойчивости каждого из решений. Исследована эволюция
областей устойчивости в плоскости двух безразмерных инерционных параметров
спутника при изменении величины безразмерного гиростатического момента. Найдены
все бифуркационные значения безразмерного гиростатического момента, при которых
области выполнения необходимых и (или) достаточных условий устойчивости
изменяют свой качественный вид.
В настоящей работе рассматривается
более общая ситуация, когда вектор внутреннего гиростатического момента лежит в
одной из главных центральных плоскостей инерции. Задача в такой постановке
решалась в работе [3], где основное
внимание уделено рассмотрению равновесий, когда ни одна из связанных осей
спутника не совпадает с орбитальными осями.
В препринте предложен новый способ определения всех
положений равновесия и получены условия существования этих равновесий в
зависимости от трех безразмерных параметров системы. Численно-аналитическим
методом проведен детальный анализ эволюции областей существования различного
числа решений. Определены все бифуркационные значения параметров, при которых
происходит изменение числа положений равновесия. Получены в виде простых
неравенств достаточные условия устойчивости всех найденных равновесий. Проведен
численный анализ эволюции областей выполнения достаточных условий устойчивости
положений равновесия гиростата при
изменении безразмерных параметров системы.
Рассмотрим
задачу о вращательном движении спутника-гиростата (далее спутник или гиростат),
представляющего собой твердое тело с расположенными внутри него статически и
динамически уравновешенными роторами. Считаем, что угловая скорость вращения
роторов относительно корпуса спутника постоянна и центр масс спутника движется
по круговой орбите.
Введем две правые декартовы системы
координат с началом в центре масс О
спутника.![]()
![]() – орбитальная
система координат. Ось
– орбитальная
система координат. Ось ![]() направлена вдоль радиуса-вектора,
соединяющего центры масс Земли и спутника; ось
направлена вдоль радиуса-вектора,
соединяющего центры масс Земли и спутника; ось ![]() направлена вдоль вектора линейной
скорости центра масс O.
направлена вдоль вектора линейной
скорости центра масс O.
![]() – связанная со спутником система
координат;
– связанная со спутником система
координат; ![]() суть главные
центральные оси инерции спутника.
суть главные
центральные оси инерции спутника.
Определим
ориентацию системы координат ![]() относительно
орбитальной системы самолетными углами α, β, γ (рис. 1).
относительно
орбитальной системы самолетными углами α, β, γ (рис. 1).
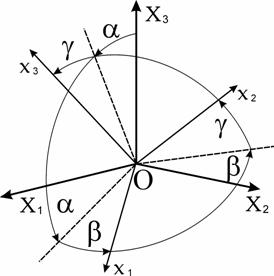
Рис. 1
Тогда
направляющие косинусы ![]() задаются выражениями
задаются выражениями
 (1)
(1)
а уравнения движения спутника-гиростата относительно его центра масс записываются в виде [4]
 (2)
(2)
 (3)
(3)
Здесь A, B, C – главные
центральные моменты инерции гиростата; p, q, r, ![]() - проекции абсолютной
угловой скорости гиростата и проекции вектора гиростатического момента на оси
- проекции абсолютной
угловой скорости гиростата и проекции вектора гиростатического момента на оси ![]() ;
; ![]() - угловая скорость
движения центра масс гиростата по круговой орбите. Точкой обозначено
дифференцирование по времени t.
- угловая скорость
движения центра масс гиростата по круговой орбите. Точкой обозначено
дифференцирование по времени t.
Для системы (2), (3) справедлив
обобщенный интеграл энергии [4]
 (4)
(4)
В [5] после
введения обозначений ![]() получена система уравнений
получена система уравнений
 (5)
(5)
позволяющая определить все
положения равновесия гиростата в орбитальной системе координат. При этом ![]() , как элементы ортогональной матрицы, удовлетворяют условиям
, как элементы ортогональной матрицы, удовлетворяют условиям
 (6)
(6)
При
![]() систему уравнений (5),
(6) можно разрешить относительно
систему уравнений (5),
(6) можно разрешить относительно ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . В результате получим [5]
. В результате получим [5]
 (7)
(7)
Здесь ![]() ,
, ![]() , а направляющие косинусы
, а направляющие косинусы ![]() ,
, ![]() ,
, ![]() определяются из трех
уравнений
определяются из трех
уравнений
 (8)
(8)
После
решения системы (8) формулы (7) позволяют определить оставшиеся шесть
направляющих косинусов. Отметим, что решения (7) существуют лишь в том случае,
когда из трех направляющих косинусов ![]() ,
, ![]() ,
, ![]() никакие два
одновременно не обращаются в нуль. Случаи
никакие два
одновременно не обращаются в нуль. Случаи ![]() ,
, ![]() ,
, ![]() являются особыми и их
следует рассматривать непосредственно обращаясь к системам (5) и (6).
являются особыми и их
следует рассматривать непосредственно обращаясь к системам (5) и (6).
В предыдущей работе [2] был рассмотрен
частный случай, когда вектор гиростатического момента коллинеарен одной из
главных центральный осей инерции спутника (![]() ). Далее исследуем более общий случай, когда вектор гиростатического момента
лежит в одной из главных центральных плоскостей инерции спутника. Пусть, например,
). Далее исследуем более общий случай, когда вектор гиростатического момента
лежит в одной из главных центральных плоскостей инерции спутника. Пусть, например, ![]() Тогда система (8)
после введения безразмерных параметров
Тогда система (8)
после введения безразмерных параметров
 (9)
(9)
принимает вид
 (10)
(10)
Заметим, что безразмерный
параметр ![]() , являясь по существу инерционным параметром спутника, сам по
себе форму его эллипсоида инерции не определяет. Однако можно указать на связь
, являясь по существу инерционным параметром спутника, сам по
себе форму его эллипсоида инерции не определяет. Однако можно указать на связь ![]() с безразмерными
инерционными параметрами
с безразмерными
инерционными параметрами ![]() и
и ![]()
 .
.
При исследовании
системы (10) необходимо рассмотреть два
случая: ![]() и
и ![]() . При
. При ![]() имеем
имеем
 (11)
(11)
Из второго уравнения системы (11)
следует, что если ![]() , то и
, то и ![]() , и наоборот. Существование решения, для которого
, и наоборот. Существование решения, для которого
![]() (12)
(12)
исследуем путем анализа исходных
уравнений (5), (6). При этом уравнения
(5) после перехода к безразмерным параметрам (9) и условия ортогональности (6)
сводятся к системе

откуда следует уравнение четвертого
порядка относительно ![]()
![]() (13)
(13)
В результате получаем положения
равновесия
 (14)
(14)
где ![]() - действительный
корень уравнения (13). Равновесия (14), число которых может доходить до 8,
образуют группу решений I.
- действительный
корень уравнения (13). Равновесия (14), число которых может доходить до 8,
образуют группу решений I.
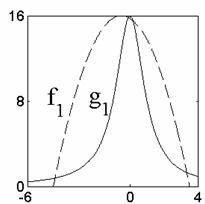
Если переписать уравнение
(13) в виде ![]() , где
, где
 ,
,
то становится очевидным, что оно
может иметь либо 2, либо 4 действительных корня (см. рис. 2, где показан
типичный вид функций ![]() и
и ![]() ).
).

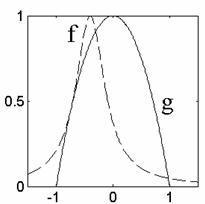

а
б в
Рис. 2: (а) ![]() ; (б)
; (б) ![]() ; (в)
; (в) ![]() .
.
Изменение числа корней происходит на
поверхности, определяемой условиями
![]()
которые могут быть переписаны в виде
 . (15)
. (15)
При этом уравнение (13) имеет три
корня, один из которых кратности 2 (рис. 2б).
Записав первое уравнение (15) в виде

и
разделив его на второе уравнение, получим
![]()
откуда
![]() . Подставляя найденное
. Подставляя найденное
![]() во второе уравнение (15), получим
во второе уравнение (15), получим
![]() .
(16)
.
(16)
Таким образом, уравнение (13) имеет
четыре корня при ![]() и два корня при
и два корня при ![]() . Следовательно, общее число равновесных ориентаций для
случая (12) в зависимости от соотношения между безразмерными параметрами
. Следовательно, общее число равновесных ориентаций для
случая (12) в зависимости от соотношения между безразмерными параметрами ![]() и
и ![]() может быть 8
или 4.
может быть 8
или 4.
Теперь рассмотрим систему (11) при ![]() и
и ![]() . Разделив второе
уравнение системы на
. Разделив второе
уравнение системы на ![]() и обозначая
и обозначая ![]() , перепишем его в виде
, перепишем его в виде
![]() .
(17)
.
(17)
Решение уравнения (17) имеет вид
 ,
(18)
,
(18)
где
![]() . (19)
. (19)
Первое и третье уравнения системы
(11) при подстановке в них ![]() приводят к системе
приводят к системе

разрешая которую относительно ![]() и
и ![]() , получим
, получим
 (20)
(20)
Поскольку ![]() и
и ![]() являются элементами
матрицы направляющих косинусов, то должны выполняться условия
являются элементами
матрицы направляющих косинусов, то должны выполняться условия ![]() и
и ![]() . Однако, если
. Однако, если
![]() ,
(21)
,
(21)
то условия ![]() , в силу третьего уравнения системы (11), выполняются
автоматически.
, в силу третьего уравнения системы (11), выполняются
автоматически.
Таким образом, для того,
чтобы решения (18), (20) отвечали положению равновесия спутника-гиростата,
должны выполняться условия (21), и, кроме того, детерминант (19) должен быть
неотрицателен.
Проанализируем знак
детерминанта. Очевидно, что ![]() , если
, если ![]() , т.е. при
, т.е. при ![]() , либо при
, либо при ![]() . Для того, чтобы
определить знак
. Для того, чтобы
определить знак ![]() на интервале
на интервале ![]() , запишем его в виде
, запишем его в виде
![]() .
.
Тогда становится очевидным, что ![]() при
при
 либо
либо  (22)
(22)
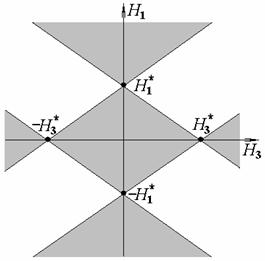
На рис. 3 соответствующие области в
плоскости ![]() заштрихованы.
заштрихованы.
Теперь перейдем к анализу
условий (21). С учетом (20) и соотношения
 ,
,
справедливого в силу второго уравнения (11), условия
(21) принимают вид
 (23)
(23)
|
|
|
Рис. 3
Левые части (23) представляют собой квадратные полиномы
относительно ![]() . Запишем их в виде
. Запишем их в виде
![]() ,
, ![]() , (24)
, (24)
где

Введем также следующие обозначения коэффициентов
уравнения (17):

Тогда подставляя
в неравенства (24),
получим
 (25)
(25)
Таким образом, решения
системы (11) при ![]() существуют и отвечают равновесным ориентациям
спутника-гиростата, если выполняются неравенства (25) и
существуют и отвечают равновесным ориентациям
спутника-гиростата, если выполняются неравенства (25) и ![]() .
.
Вообще говоря,
неравенства (25) могут выполняться для обоих или только для одного знака перед
радикалом, что означает существование положений равновесия, отвечающих обоим
корням (18), или только одному корню ![]() или
или ![]() . При этом,
. При этом, ![]() , направляющие косинусы
, направляющие косинусы ![]() и
и ![]() определяются из
(20), а остальные направляющие косинусы
с учетом (7) и (9) принимают вид
определяются из
(20), а остальные направляющие косинусы
с учетом (7) и (9) принимают вид

 (26)
(26)
Очевидно, что и в этом случае число
возможных равновесных ориентаций не превышает восьми. Далее будем называть эту
группу решений – группа II.
Рассмотрим, наконец, систему (10) в случае ![]() . Тогда имеем
. Тогда имеем
 (27)
(27)
Из
второго уравнения (27) следует, что если ![]() , то и
, то и ![]() (и наоборот, если
(и наоборот, если ![]() , то и
, то и ![]() ), что противоречит третьему уравнению системы.
), что противоречит третьему уравнению системы.
Домножив правую часть второго уравнения (27) на ![]() , получим
, получим
![]()
Разделим
полученное уравнение на ![]() и обозначим
и обозначим ![]() . Тогда получим уравнение
. Тогда получим уравнение
![]() ,
(28)
,
(28)
определив
из которого ![]() и подставив его в
третье уравнение (27), записанное в виде
и подставив его в
третье уравнение (27), записанное в виде
![]()
найдем
два значения ![]() , а затем
соответствующие значения
, а затем
соответствующие значения ![]() . Остальные направляющие косинусы можно получить, используя
формулы (26) с учетом равенства
. Остальные направляющие косинусы можно получить, используя
формулы (26) с учетом равенства ![]() . Окончательный вид матрицы
направляющих косинусов будет иметь вид
. Окончательный вид матрицы
направляющих косинусов будет иметь вид
 (29)
(29)
Так как число действительных корней
уравнения (28) не превышает четырех, то система уравнений (27) определяет не
более восьми равновесных ориентаций спутника-гиростата. Далее будем называть
эту группу решений – группа III.
Уравнение (28) четвертого
порядка и аналогично (13) может иметь 4 или 2 действительных корня. Перепишем
(28) в виде ![]() где
где

На
рис. 4 показано типичное поведение
функций ![]() и
и ![]() .
.


а
б в
Рис. 4: (а) ![]() ; (б)
; (б) ![]() ; (в)
; (в) ![]() .
.
Изменение
числа корней происходит на поверхности, определяемой условиями
![]() ,
,
или

откуда,
исключая ![]() , после несложных преобразований получаем
, после несложных преобразований получаем
![]() . (30)
. (30)
Таким
образом, уравнение (28) имеет 4 корня при ![]() и два корня при
и два корня при ![]() .
.
4. Анализ эволюции
равновесий
Результаты анализа числа корней уравнений
четвертого порядка (13) и (28) можно суммировать следующим образом. Кривые (16) и (30) делят плоскость ![]() на три подобласти
(рис. 5).
на три подобласти
(рис. 5).

Рис. 5
Если
![]() то оба уравнения имеют
по четыре корня и, следовательно, существует по 8 решений групп I и III; если
то оба уравнения имеют
по четыре корня и, следовательно, существует по 8 решений групп I и III; если ![]() , то (13) имеет два корня, а (28) – четыре, т.е. существуют 4
решения группы I и 8 решений группы III; если
, то (13) имеет два корня, а (28) – четыре, т.е. существуют 4
решения группы I и 8 решений группы III; если ![]() , то оба уравнения имеют по два корня, т.е. существует по 4
решения групп I и III.
, то оба уравнения имеют по два корня, т.е. существует по 4
решения групп I и III.
Рассмотрим
теперь решения группы II, для которых должны выполняться неравенства (25). Как
отмечалось ранее, неравенства (25) могут выполняться для обоих или только для
одного знака перед радикалом, что означает существование восьми положений равновесия, отвечающих корням ![]() , или четырех, соответствующих
, или четырех, соответствующих ![]() или
или ![]() . Условия (25)
обращаются в равенства на кривых
. Условия (25)
обращаются в равенства на кривых ![]() и
и ![]() . В зависимости от знака перед радикалом в (25) кривые будем
обозначать
. В зависимости от знака перед радикалом в (25) кривые будем
обозначать ![]() ,
, ![]() и
и ![]() ,
, ![]() . В области, ограниченной кривыми
. В области, ограниченной кривыми ![]() ,
, ![]() , существуют 4 решения группы II, а в области, ограниченной
кривыми
, существуют 4 решения группы II, а в области, ограниченной
кривыми ![]() ,
, ![]() , другие 4 решения этой группы. На пересечении этих областей
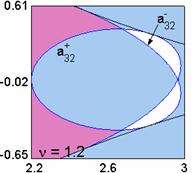
существуют все 8 решений группы II. Пример областей выполнения неравенств (25) при
, другие 4 решения этой группы. На пересечении этих областей
существуют все 8 решений группы II. Пример областей выполнения неравенств (25) при ![]() представлен на
рис. 6. Отметим, что в данном случае дискриминант (19) всегда положителен
и не требуется выполнение условий (22). Рис. 6.1 соответствует положительному знаку перед
радикалом, а рис. 6.2 отрицательному. В
заштрихованных областях существуют по четыре решения. На левом рис. 6.1 случай
положительного радикала представлен в более мелком масштабе, что позволяет
полностью показать область выполнения (25). На рисунках также показаны границы
(16) и (30).
представлен на
рис. 6. Отметим, что в данном случае дискриминант (19) всегда положителен
и не требуется выполнение условий (22). Рис. 6.1 соответствует положительному знаку перед
радикалом, а рис. 6.2 отрицательному. В
заштрихованных областях существуют по четыре решения. На левом рис. 6.1 случай
положительного радикала представлен в более мелком масштабе, что позволяет
полностью показать область выполнения (25). На рисунках также показаны границы
(16) и (30).


1)
2)
Рис. 6
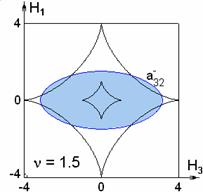
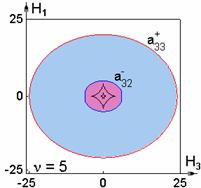
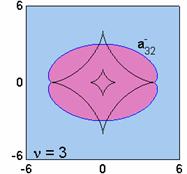
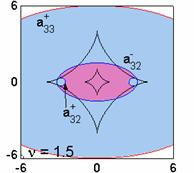
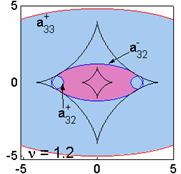
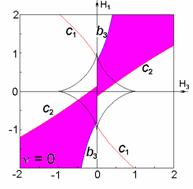
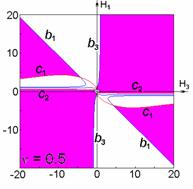
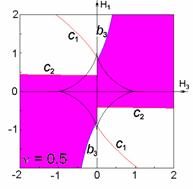
Результаты анализа числа
решений группы II в этом случае можно суммировать следующим образом. Кривые ![]() ,
, ![]() и
и ![]() ,
, ![]() делят плоскость
делят плоскость ![]() на ряд подобластей,
представленных на рис. 7 (граница
на ряд подобластей,
представленных на рис. 7 (граница ![]() находится вне поля
рисунка). В области, выделенной голубым цветом (объединение областей выполнения
(25) для положительного и отрицательного знаков), существуют 4 решения группы II, а в розовой области (пересечение
областей выполнения (25) для положительного и отрицательного знаков) существуют
все 8 решений группы II. Вне границы
находится вне поля
рисунка). В области, выделенной голубым цветом (объединение областей выполнения
(25) для положительного и отрицательного знаков), существуют 4 решения группы II, а в розовой области (пересечение
областей выполнения (25) для положительного и отрицательного знаков) существуют
все 8 решений группы II. Вне границы ![]() (рис. 6.1) нет
решений группы II.
(рис. 6.1) нет
решений группы II.

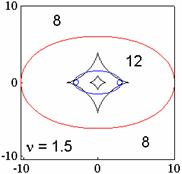
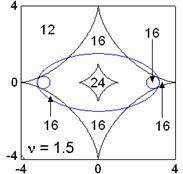
Рис. 7
Рис.8
На рис. 8 показано финальное
разбиение плоскости ![]() кривыми (16), (30) и
кривыми (16), (30) и ![]() ,
, ![]() ,
, ![]() ,
, ![]() на подобласти, в
каждой из которых существует определенное число равновесий (справа центральная
часть разбиения увеличена). Отметим, что кривые
на подобласти, в
каждой из которых существует определенное число равновесий (справа центральная
часть разбиения увеличена). Отметим, что кривые ![]() ,
, ![]() симметричны
относительно координатных осей, что непосредственно следует из (18), (20).
симметричны
относительно координатных осей, что непосредственно следует из (18), (20).
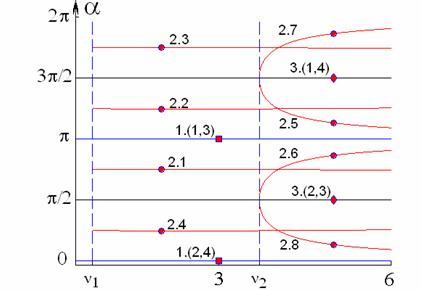
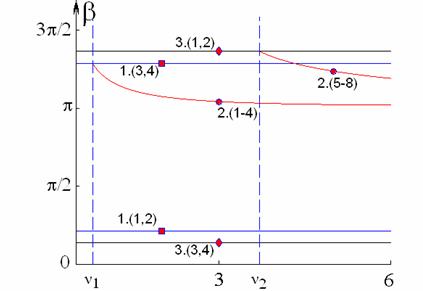
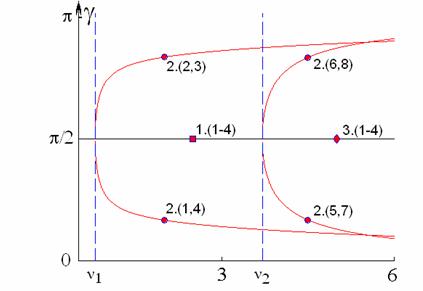
Интересно проследить
эволюцию найденных положений равновесия при изменении параметров системы.
Например, рассмотрим поведение решений при смещении в плоскости ![]() из начала координат
вдоль прямой
из начала координат
вдоль прямой ![]()
![]() при фиксированном
при фиксированном ![]() (рис. 9). Каждое
положение равновесия группы I (группы III) определяется выбором одного из
корней уравнения (13) (уравнения (28)) и выбором знака направляющего косинуса
(рис. 9). Каждое
положение равновесия группы I (группы III) определяется выбором одного из
корней уравнения (13) (уравнения (28)) и выбором знака направляющего косинуса ![]() (
(![]() ). Каждое положение равновесия группы II определяется выбором одного из
корней уравнения (17) и выбором знаков направляющих косинусов
). Каждое положение равновесия группы II определяется выбором одного из
корней уравнения (17) и выбором знаков направляющих косинусов ![]() и
и ![]() . В соответствии с этим проиндексируем равновесия
(табл. 1) и построим зависимости отвечающих им углов
. В соответствии с этим проиндексируем равновесия
(табл. 1) и построим зависимости отвечающих им углов ![]() от
от ![]() (рис. 10).
(рис. 10).
Таблица 1
|
Группа I |
Группа II |
Группа III |
|||||||
|
Корень (13) |
Знак |
Индекс |
Корень (17) |
Знак |
Знак |
Индекс |
Корень (28) |
Знак |
Индекс |
|
1 |
- |
1.1 |
1 |
- |
- |
2.1 |
1 |
- |
3.1 |
|
+ |
1.2 |
- |
+ |
2.2 |
+ |
3.2 |
|||
|
2 |
- |
1.3 |
+ |
- |
2.3 |
2 |
- |
3.3 |
|
|
+ |
1.4 |
+ |
+ |
2.4 |
+ |
3.4 |
|||
|
3 |
- |
1.5 |
2 |
- |
- |
2.5 |
3 |
- |
3.5 |
|
+ |
1.6 |
- |
+ |
2.6 |
+ |
3.6 |
|||
|
4 |
- |
1.7 |
+ |
- |
2.7 |
4 |
- |
3.7 |
|
|
+ |
1.8 |
+ |
+ |
2.8 |
+ |
3.8 |
|||
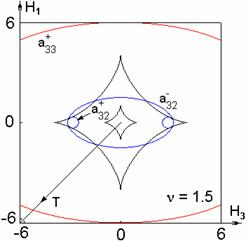
Рис.9

а)

б)
в)
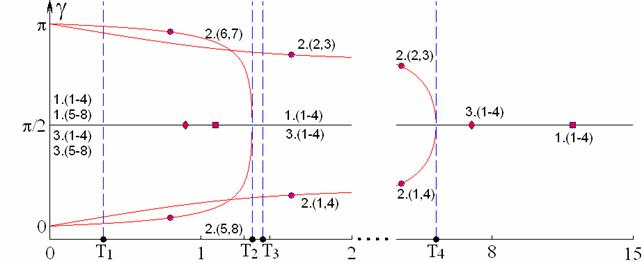
Рис. 10: Эволюция положений равновесий
Каждая кривая на рисунках снабжена
индексом соответствующего ей решения и маркером. Маркер «квадрат» соответствует
решениям группы I, маркер «круг» - решениям группы II и маркер «ромб» - решениям группы III.
Как
видно из рис. 10, существуют 4 значения параметра ![]() , при которых происходит смена общего числа решений. При
, при которых происходит смена общего числа решений. При ![]() существуют все 24 решения. Значение
существуют все 24 решения. Значение ![]() , соответствует пересечению прямой
, соответствует пересечению прямой ![]() и кривой (16). В этом случае 4 решения группы I перестают существовать (угол
и кривой (16). В этом случае 4 решения группы I перестают существовать (угол ![]() , соответствующий этим решениям, принимает значение
, соответствующий этим решениям, принимает значение ![]() ). При
). При ![]() существуют 20 решений
(равновесий), а при
существуют 20 решений
(равновесий), а при ![]() (пересечение прямой
(пересечение прямой ![]() и кривой
и кривой ![]() ) 4 решения группы II переходят в 4 решения группы III, а именно
) 4 решения группы II переходят в 4 решения группы III, а именно ![]() ,
, ![]() . При
. При ![]() существуют 16 равновесий. Значение
существуют 16 равновесий. Значение ![]() соответствует
пересечению прямой
соответствует
пересечению прямой ![]() и кривой (30) и 4 решения группы III (решения 3.(5-8)) перестают
существовать (угол
и кривой (30) и 4 решения группы III (решения 3.(5-8)) перестают
существовать (угол ![]() , соответствующий этим решениям, принимает значение
, соответствующий этим решениям, принимает значение ![]() ). При
). При ![]() существуют 12 решений, а при
существуют 12 решений, а при ![]() (пересечение прямой
(пересечение прямой ![]() и кривой
и кривой ![]() ) 4 оставшихся решения
группы 2, а именно 2.(1-4), также исчезают. При
) 4 оставшихся решения
группы 2, а именно 2.(1-4), также исчезают. При ![]() существуют только 8
решений (решения 1.(1-4) и 3.(1-4)), причем, углы
существуют только 8
решений (решения 1.(1-4) и 3.(1-4)), причем, углы ![]() для этих решений имеют
постоянные значения, а углы
для этих решений имеют
постоянные значения, а углы ![]() с ростом
с ростом ![]() стремятся к постоянным
значениям.
стремятся к постоянным
значениям.
На
рис.11 схематично представлена геометрическая интерпретация положений
равновесия первой и третьей групп. Для группы I оси ![]() и
и ![]() параллельны или
антипараллельны друг другу, угол между осями
параллельны или
антипараллельны друг другу, угол между осями
![]() и
и ![]() определяется из
соотношения
определяется из
соотношения ![]() , а положение вектора гиростатического момента
в плоскости
, а положение вектора гиростатического момента
в плоскости ![]() определяется углом
определяется углом ![]() , для которого
, для которого ![]() . Для группы III оси
. Для группы III оси ![]() и
и ![]() параллельны или
антипараллельны друг другу, угол между осями
параллельны или
антипараллельны друг другу, угол между осями
![]() и
и ![]() определяется из
соотношения
определяется из
соотношения ![]() , а положение
вектора гиростатического момента определяется также, как и для группы I.
, а положение
вектора гиростатического момента определяется также, как и для группы I.
Таким образом, для всех
решений группы I кинетический момент повернут вокруг радиуса-вектора (по рысканью), а для
решений группы III –относительно трансверсали (по крену). В обоих случаях в
положении равновесия гироскопический момент, обусловленный несовпадением
вектора кинетического момента и нормали к плоскости орбиты, уравновешивается
гравитационным моментом, действующим на отклоненный от орбитального
трехгранника спутник.
Для решений группы II ни одна ось связанной системы
координат не совпадает ни с одной осью орбитальной системы координат, положение
вектора гиростатического момента в плоскости ![]() так же как и для
других двух групп определяется из соотношения
так же как и для
других двух групп определяется из соотношения ![]() .
.


1)
2)
Рис. 11: (1) группа I, (2) группа III.
Теперь
рассмотрим эволюцию областей выполнения условий (25) при изменении параметра ![]() . Отметим тот факт, что достаточно ограничиться рассмотрением
ситуаций, когда
. Отметим тот факт, что достаточно ограничиться рассмотрением
ситуаций, когда ![]() . Из уравнения (17) следует, что при замене
. Из уравнения (17) следует, что при замене ![]()
![]() . А, согласно (20), при замене
. А, согласно (20), при замене ![]() величины
величины ![]() не изменяются. То
есть, значение параметра
не изменяются. То
есть, значение параметра ![]() является «центром
симметрии» данной задачи. Для того чтобы получить картину областей, описывающих
различное число равновесий, при
является «центром
симметрии» данной задачи. Для того чтобы получить картину областей, описывающих
различное число равновесий, при ![]() , достаточно повернуть области выполнения (25) при
, достаточно повернуть области выполнения (25) при ![]() на
на ![]() в плоскости
в плоскости ![]() . Таким образом,
достаточно ограничиться рассмотрением интервала
. Таким образом,
достаточно ограничиться рассмотрением интервала ![]() .
.
При
анализе эволюции областей выполнения условий (25) особый интерес представляют
ситуации, когда кривые ![]() ,
, ![]() проходят через
характерные точки
проходят через
характерные точки ![]() ,
, ![]() ,
, ![]() и
и ![]() , так как в этих случаях происходит качественная смена вида
областей существования различного числа решений групп I-III. Из (25) следует, что на прямых
, так как в этих случаях происходит качественная смена вида
областей существования различного числа решений групп I-III. Из (25) следует, что на прямых ![]() неравенства в случае положительного знака перед радикалом
обращаются в тождества, т.е. (25) выполняются для любого значения
неравенства в случае положительного знака перед радикалом
обращаются в тождества, т.е. (25) выполняются для любого значения ![]() . Рассмотрим случай отрицательного знака. Неравенства (25)
принимают вид
. Рассмотрим случай отрицательного знака. Неравенства (25)
принимают вид
![]() (31)
(31)
и все определяется знаками ![]() и
и ![]() .
.
На прямой ![]()
![]()
Первое неравенство (31) выполняется
для любого значения ![]() . Второе неравенство (31) верно, когда
. Второе неравенство (31) верно, когда ![]() . Кривая
. Кривая ![]() проходит через точку
(1, 0), когда
проходит через точку
(1, 0), когда ![]() и
и ![]() , а кривая
, а кривая ![]() проходит через эту
точку, если
проходит через эту
точку, если ![]() и
и ![]() . Напомним, что значения
. Напомним, что значения ![]() нас не
интересуют. Кривая
нас не
интересуют. Кривая ![]() проходит через точку
(4, 0) в случаях, когда
проходит через точку
(4, 0) в случаях, когда ![]() и
и ![]() , а кривая
, а кривая ![]() проходит через эту
точку при
проходит через эту
точку при ![]() .
.
На прямой ![]()
![]()
Первое неравенство (31) выполняется,
когда ![]() . Второе неравенство (31) верно для любого значения
. Второе неравенство (31) верно для любого значения ![]() . Кривая
. Кривая ![]() проходит через точку
(0, 1), когда
проходит через точку
(0, 1), когда ![]() , а кривая
, а кривая ![]() проходит через эту
точку, когда
проходит через эту
точку, когда ![]() ,
, ![]() . Кривая
. Кривая ![]() проходит через точку
(0, 4), если
проходит через точку
(0, 4), если ![]() , а кривая
, а кривая ![]() проходит через эту
точку, если
проходит через эту
точку, если ![]() . Таким образом, можно выделить следующие значения параметра
. Таким образом, можно выделить следующие значения параметра ![]() , при которых происходит качественное изменение вида областей
существования различного числа решений групп I-III:
, при которых происходит качественное изменение вида областей
существования различного числа решений групп I-III:
![]() .
.
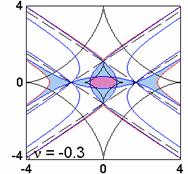
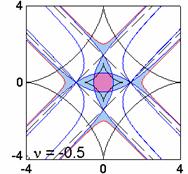
Примеры областей
выполнения (25) представлены на рис. 12. Приведены характерные ситуации, при
которых происходит качественная смена областей существования различного числа
решений.

1)
2) 3)
4)
5)


6)
7)


8)

9)
10)
Рис. 12: Эволюция областей выполнения (25)
При ![]() (рис. 12.2) происходит
пересечение кривых
(рис. 12.2) происходит
пересечение кривых ![]() и (30) в точках
и (30) в точках ![]() . При
. При ![]() (рис. 12.3), также
происходит пересечение кривых
(рис. 12.3), также
происходит пересечение кривых ![]() и (30), но уже в
точках
и (30), но уже в
точках ![]() . Кроме этого, при
. Кроме этого, при ![]() происходит зарождение
новых областей, ограниченных кривыми
происходит зарождение
новых областей, ограниченных кривыми ![]() , в которых условия (25)
не выполняются для положительного знака перед радикалом. Эти области при
, в которых условия (25)
не выполняются для положительного знака перед радикалом. Эти области при
![]() показаны на рис. 12.4.
На рисунках 12.2-3 граница
показаны на рис. 12.4.
На рисунках 12.2-3 граница ![]() находится вне поля
рисунка и не показана, так как не претерпевает никаких качественных изменений.
Дальнейшее уменьшение параметра
находится вне поля
рисунка и не показана, так как не претерпевает никаких качественных изменений.
Дальнейшее уменьшение параметра ![]() приводит к тому, что
кривые
приводит к тому, что
кривые ![]() и
и ![]() пересекаются,
вследствие чего появляются области, в которых условия (25) не выполняются.
Пример таких областей представлен на втором рисунке 12.5. При
пересекаются,
вследствие чего появляются области, в которых условия (25) не выполняются.
Пример таких областей представлен на втором рисунке 12.5. При ![]() (рис. 12.5) происходит
касание кривых
(рис. 12.5) происходит
касание кривых ![]() и (30). При
и (30). При ![]() (рис. 12.6) кривые
(рис. 12.6) кривые ![]() и (30) пересекаются в
точках
и (30) пересекаются в
точках ![]() а кривые
а кривые ![]() и (16) в точках
и (16) в точках ![]() . При
. При ![]() (рис.12.7) происходит
касание кривых
(рис.12.7) происходит
касание кривых ![]() и (16). Дальнейшее уменьшение параметра
и (16). Дальнейшее уменьшение параметра ![]() ведет к «сужению»
областей выполнения условий (25). При
ведет к «сужению»
областей выполнения условий (25). При ![]() все области выполнения
условий (25) вырождаются в прямую
все области выполнения
условий (25) вырождаются в прямую ![]() .
.
После прохождения нуля
необходимо учитывать неравенства (22). На рис. 12.8 показана ситуация, когда ![]() (приведен общий
рисунок и два его фрагмента в увеличенном масштабе). Пунктирные линии – границы
областей выполнения условий (22). При
(приведен общий
рисунок и два его фрагмента в увеличенном масштабе). Пунктирные линии – границы
областей выполнения условий (22). При ![]() кривая
кривая ![]() проходит через точки
проходит через точки ![]() , а области, ограниченные кривыми
, а области, ограниченные кривыми ![]() , вырождаются в эти точки и перестают существовать. Рис. 12.10 симметричен относительно прямых
, вырождаются в эти точки и перестают существовать. Рис. 12.10 симметричен относительно прямых ![]() .
.
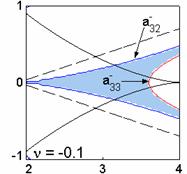
Теперь построим картину
эволюции углов ![]() каждого из 24-х положений
равновесия вдоль прямой
каждого из 24-х положений
равновесия вдоль прямой ![]() в пространстве
в пространстве ![]() . В качестве примера рассмотрим прямую
. В качестве примера рассмотрим прямую ![]() ,
, ![]() . На рис. 13(а,б,в) показана эволюция углов
. На рис. 13(а,б,в) показана эволюция углов ![]() ,
, ![]() ,
, ![]() . При этом используется прежняя индексация равновесий (см.
табл. 1). Понятно, что в рассматриваемой точке
. При этом используется прежняя индексация равновесий (см.
табл. 1). Понятно, что в рассматриваемой точке ![]() решения 1.5-8 группы I и решения 3.5-8 группы III не существуют. Отметим, что в точке
решения 1.5-8 группы I и решения 3.5-8 группы III не существуют. Отметим, что в точке ![]() при
при ![]() условия (22) не
выполняются.
условия (22) не
выполняются.
Как видно из рис. 13, для случая ![]() существует два
бифуркационных значения параметра
существует два
бифуркационных значения параметра ![]() , при которых происходит изменение общего числа решений. При
, при которых происходит изменение общего числа решений. При ![]() через точку
через точку ![]() проходит кривая
проходит кривая ![]() и четыре решения
группы II переходят в решения группы III, а именно
и четыре решения
группы II переходят в решения группы III, а именно ![]() и
и ![]() . При
. При ![]() через точку
через точку ![]() проходит кривая
проходит кривая ![]() и оставшиеся четыре
решения группы II также перестают существовать. Таким образом, проведенный анализ показал, что на границах
и оставшиеся четыре
решения группы II также перестают существовать. Таким образом, проведенный анализ показал, что на границах ![]() и
и ![]() решения 2.(5-8) группы
II переходят в
решения 3.(1-4) группы III. На границах
решения 2.(5-8) группы
II переходят в
решения 3.(1-4) группы III. На границах ![]() и
и ![]() решения 2.(1-4)
исчезают. Также исчезают решения 1.(5-8) группы I на границе (16) и решения 3.(5-8)
группы III на границе (30).
решения 2.(1-4)
исчезают. Также исчезают решения 1.(5-8) группы I на границе (16) и решения 3.(5-8)
группы III на границе (30).
 а)
а)
 б)
б)
 в)
в)
Рис. 13
5. Достаточные условия устойчивости
положений равновесия
Для получения
достаточных условий устойчивости положений равновесия спутника-гиростата
воспользуемся обобщенным интегралом энергии (4). Представим ![]() ,
, ![]() ,
, ![]() в виде
в виде
![]()
где
![]() ,
, ![]() ,
, ![]() - малые отклонения от
положения равновесия спутника
- малые отклонения от
положения равновесия спутника ![]() ,
, ![]() ,
, ![]() . Тогда интеграл энергии может быть записан в виде [2]
. Тогда интеграл энергии может быть записан в виде [2]

где ![]() обозначает члены выше
второго порядка малости относительно
обозначает члены выше
второго порядка малости относительно ![]() ,
,![]() ,
,
![]() ,
,
|
|
(32) |
Из
теоремы Ляпунова следует, что решение ![]() ,
, ![]() ,
, ![]() устойчиво, если
квадратичная форма
устойчиво, если
квадратичная форма
![]()
является
определенно-положительной, т.е. при

Заметим, что для решений (14) и (29) ![]() и достаточные условия
устойчивости упрощаются:
и достаточные условия
устойчивости упрощаются:
![]() .
.
Таким образом, для решений
(14) они принимают вид
 (33)
(33)
Для
решений (29) имеем
 (34)
(34)
Исследование устойчивости
стационарных решений группы II оказывается значительно более трудоемким. При этом должны
использоваться соотношения (18)-(20) для
определения ![]() и (26) для оставшихся
элементов матрицы направляющих косинусов. Затем однозначно определяются углы
и (26) для оставшихся
элементов матрицы направляющих косинусов. Затем однозначно определяются углы ![]() , вычисляются коэффициенты квадратичной формы (32) и условия
ее положительной определенности.
, вычисляются коэффициенты квадратичной формы (32) и условия
ее положительной определенности.
Рассмотрим
достаточные условия устойчивости решений (14) и (29) более подробно. Условия
(33) в зависимости от соотношения между моментами инерции спутника А и С
и с использованием безразмерных параметров (9) можно переписать в виде
 (35)
(35)
Здесь
Напомним, что ![]() является вещественным
корнем уравнения (13), причем в области, ограниченной кривой (16) существуют
четыре таких корня, а в остальной части плоскости
является вещественным
корнем уравнения (13), причем в области, ограниченной кривой (16) существуют
четыре таких корня, а в остальной части плоскости ![]() только два. Также
нетрудно показать, что области выполнения достаточных условий устойчивости (35) антисимметричны в плоскости
только два. Также
нетрудно показать, что области выполнения достаточных условий устойчивости (35) антисимметричны в плоскости ![]() относительно
координатных осей.
относительно
координатных осей.
Аналогичным
образом можно записать условия (34). Имеем
 (36)
(36)
где
Здесь ![]() - один из действительных корней уравнения (28). Как и в
предыдущем случае, уравнение (28) имеет четыре корня в области, ограниченной
кривой (30), и два корня в остальной части плоскости
- один из действительных корней уравнения (28). Как и в
предыдущем случае, уравнение (28) имеет четыре корня в области, ограниченной
кривой (30), и два корня в остальной части плоскости ![]() . Кроме того, легко показать, что области выполнения
достаточных условий устойчивости (36) симметричны в плоскости
. Кроме того, легко показать, что области выполнения
достаточных условий устойчивости (36) симметричны в плоскости ![]() относительно
координатных осей.
относительно
координатных осей.
Для иллюстрации
полученных результатов построим области выполнения достаточных условий
устойчивости для решения группы I, соответствующего одному из корней (13), существующему на
всей плоскости ![]() .
.
Условия ![]() определяют на
плоскости
определяют на
плоскости ![]() различные кривые. Некоторые из этих кривых являются границами
областей выполнения достаточных условий устойчивости. Будем считать, что
различные кривые. Некоторые из этих кривых являются границами
областей выполнения достаточных условий устойчивости. Будем считать, что ![]() определяет набор
кривых
определяет набор
кривых ![]() ,
, ![]() - набор кривых
- набор кривых ![]() и
и ![]() - набор кривых
- набор кривых ![]() . Условие
. Условие ![]() не зависит от
не зависит от ![]() и для рассматриваемого
корня определяет на плоскости
и для рассматриваемого
корня определяет на плоскости ![]() три кривые
три кривые ![]() (рис. 14).
(рис. 14).

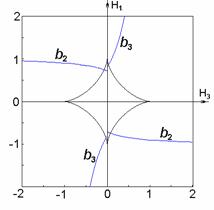
Рис. 14
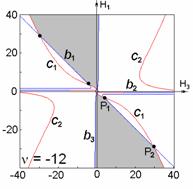
Эволюция областей выполнения
достаточных условий устойчивости в зависимости от величины параметра ![]() представлена на
рис.15. Как уже отмечалось ранее, следует различать два случая
представлена на
рис.15. Как уже отмечалось ранее, следует различать два случая ![]() и
и ![]() . Для первого случая используется серая окраска областей, а
для второго - розовая. При больших по модулю отрицательных значениях
. Для первого случая используется серая окраска областей, а
для второго - розовая. При больших по модулю отрицательных значениях ![]() области устойчивости
(для случая
области устойчивости
(для случая ![]() ) ограничены кривыми
) ограничены кривыми ![]() . Кривые
. Кривые ![]() пересекаются в точках
пересекаются в точках ![]() и
и ![]() , причем расстояние между этими точками уменьшается с ростом
, причем расстояние между этими точками уменьшается с ростом ![]() (рис. 15.1, 15.2).
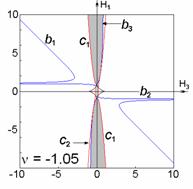
При
(рис. 15.1, 15.2).
При ![]() прямые
прямые ![]() касаются (рис. 15.3) и
при дальнейшем увеличении
касаются (рис. 15.3) и
при дальнейшем увеличении ![]() области устойчивости
ограничены только кривыми
области устойчивости
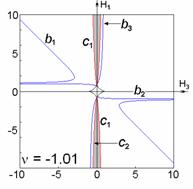
ограничены только кривыми ![]() (рис. 15.4, 15.5). При
(рис. 15.4, 15.5). При
![]() происходит касание кривых
происходит касание кривых
![]() , вследствие чего границами областей устойчивости становятся
кривые
, вследствие чего границами областей устойчивости становятся
кривые ![]() (рис. 15.6, 15.7). При
(рис. 15.6, 15.7). При ![]() кривые
кривые ![]() вырождаются в
вырождаются в ![]() . Эволюция областей устойчивости в области (16) при изменении
. Эволюция областей устойчивости в области (16) при изменении
![]() от
от ![]() до -1 не претерпевает
серьезных изменений, что иллюстрирует рис.15.8. На нем приведены кривая
до -1 не претерпевает
серьезных изменений, что иллюстрирует рис.15.8. На нем приведены кривая ![]() и кривые
и кривые ![]() для различных значений
для различных значений
![]() .
.
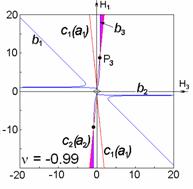
Дальнейшее
увеличение параметра ![]() ведет к появлению
областей устойчивости для случая
ведет к появлению
областей устойчивости для случая ![]() . Данные области ограничены кривыми
. Данные области ограничены кривыми ![]() , причем их точка пересечения
, причем их точка пересечения ![]() приближается к области
ограниченной (16) (рис. 15.9, 15.10), при
приближается к области
ограниченной (16) (рис. 15.9, 15.10), при ![]()
![]() ложится на (16), а при
ложится на (16), а при
![]() ложится на
ложится на ![]() . При
. При ![]() кривые
кривые ![]() параллельны на
бесконечности и дальнейший рост
параллельны на
бесконечности и дальнейший рост ![]() приводит к их
пересечению и, как следствие, к появлению новых областей устойчивости,
ограниченных ими (рис. 15.11). Дальнейшая эволюция областей устойчивости обусловлена эволюцией кривых
приводит к их
пересечению и, как следствие, к появлению новых областей устойчивости,
ограниченных ими (рис. 15.11). Дальнейшая эволюция областей устойчивости обусловлена эволюцией кривых ![]() и
и ![]() (рис. 15.12 –
15.14). Как показал численный анализ,
при дальнейшем увеличении параметра
(рис. 15.12 –
15.14). Как показал численный анализ,
при дальнейшем увеличении параметра ![]() новых
взаимопересечений этих кривых не происходит.
новых
взаимопересечений этих кривых не происходит.


1)
2)
3)


4) 5) 6)

7) 8) 9)



10)
11)

12)

13)
14)
Рис. 15: Эволюция областей устойчивости
В
настоящей работе проведено исследование движения спутника-гиростата
относительно центра масс под действием гравитационного момента на круговой
орбите. В частном случае, когда ![]() ,
, ![]() ,
, ![]() , определены три группы изолированных стационарных решений,
каждая из которых описывает до восьми равновесных ориентаций гиростата. Представлены в явном виде выражения
для направляющих косинусов в зависимости от параметров
, определены три группы изолированных стационарных решений,
каждая из которых описывает до восьми равновесных ориентаций гиростата. Представлены в явном виде выражения
для направляющих косинусов в зависимости от параметров ![]() ,
, ![]() и
и ![]() для всех найденных
равновесий гиростата. Получены условия существования этих равновесий в зависимости от безразмерных параметров
задачи. Численно-аналитическим методом проведен детальный анализ эволюции
областей существования различного числа решений в плоскости параметров
для всех найденных
равновесий гиростата. Получены условия существования этих равновесий в зависимости от безразмерных параметров
задачи. Численно-аналитическим методом проведен детальный анализ эволюции
областей существования различного числа решений в плоскости параметров ![]() при различных
значениях параметра
при различных
значениях параметра ![]() . Определены все бифуркационные значения параметров, при
которых происходит изменение количества положений равновесия. С использованием
теоремы Ляпунова получены в виде неравенств достаточные условия устойчивости
положений равновесия. Численно-аналитическим методом подробно исследована
эволюция областей выполнения достаточных условий устойчивости в плоскости
параметров
. Определены все бифуркационные значения параметров, при
которых происходит изменение количества положений равновесия. С использованием
теоремы Ляпунова получены в виде неравенств достаточные условия устойчивости
положений равновесия. Численно-аналитическим методом подробно исследована
эволюция областей выполнения достаточных условий устойчивости в плоскости
параметров ![]() при различных
значениях параметра
при различных
значениях параметра ![]() .
.
Работа выполнена при
финансовой поддержке РФФИ (проект № 03-01-00652) и Португальского Фонда по
науке и технике.
Литература
3.
R. Longman. Gravity-gradient
stabilization of gyrostat satellite with rotor axes in principal planes, Celestial Mechenics, 1970, 169-188.
4. В.А. Сарычев. Вопросы ориентации искусственных спутников,
Итоги науки и техники. Серия
“Исследование космического пространства”,
ВИНИТИ, т. 11, 1978.
5. В.А. Сарычев, С.А. Гутник.
К вопросу о положениях относительного равновесия спутника-гиростата, Космич.
исслед., 1984, т.22, №3, 323-326.