Исследование явления "интерференции" дальномерных измерений для мобильного робота в
трехмерном случае
|
|
|
Введение . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
1. |
Четыре
основные кинематические схемы работы ЛДОИС . . . . . . . . . . . |
4 |
|
2. |
Горизонтальная
«интерференция» . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5 |
|
3. |
Групповая
«интерференция» . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . |
7 |
|
|
Заключение . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .. . . . . . |
9 |
|
|
Литература . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . |
10 |
ВВЕДЕНИЕ
Лазерные
дальномерные обзорно-информационные системы (ЛДОИС) широко используются для
информационного обеспечения мобильных роботов (МР). В частности в американском
проекте военного назначения ALV (autonomous land vehicle), ASV (autonomous
suspension vehicle) и др. [1] Первая отечественная ЛДОИС была разработана в
Ленинградском механическом институте (ныне БГТУ) в 1976 году.
В
настоящее время для организации осмотра среды ЛДОИС, обычно, используется
зависимость от угла развертки в виде функции вида arctg, что обеспечивает
равномерное распределение точек измерительной сети (ИС) (измерительная сеть -
множество точек пересечения измерительных лучей с некоторой базовой плоскостью)
на базовой плоскости (БП). Исторически же первые варианты осмотра исследуемой
поверхности ЛДОИС строились на основе равномерного вращения пот углам блока
обзора. При этом дискретность осмотра на базовой плоскости увеличивается при
возрастании расстояний до точек ИС. Однако в данной работе показано, что этот
начальный вариант организации осмотра ЛДОИС позволяет уменьшить дискретность
осмотра на базовой плоскости за счёт явления «интерференции» дальномерных
измерений.
Суть
явления «интерференции» при повторных осмотрах заключается в том, что при
достаточно медленном движении мобильного робота и соответствующей развёртке возможен
такой повторный осмотр, при котором положение точек повторной измерительной
сети не совпадает с измерительной сетью, полученной при предыдущем цикле
осмотра, что ведёт к уменьшению величины разброса результирующей измерительной
сети.
За счёт
этого явления можно
·
получить сколь
угодно малую дискретность осмотра на стоящем МР
·
достичь
существенного уменьшения дискретности осмотра на движущемся МР
·
получить
дискретность осмотра для группы МР.
1.
ЧЕТЫРЕ ОСНОВНЫЕ КИНЕМАТИЧЕСКИЕ СХЕМЫ
РАБОТЫ ЛДОИС
Рассмотрим
четыре кинематические схемы дальномерных измерительных устройств.
Предполагается, что измеритель находится на высоте Н над БП.
Первая и вторая модели представляют собой простой однолучевой
измеритель (рис. 1). Обозначенные на рисунке углы a и b, определяющие направления измерения, называются углами обзора, H – высота
МР. Направление измерений задаётся координатами опорной точки на БП:
![]() ,
, ![]()
Разница
между первой и второй моделью заключается в отношении угловых скоростей по
углам обзора.
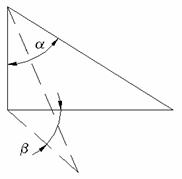
Рис. 1. Схема первой и второй модели
В третьей
и четвёртой модели к углам обзора добавляется угол сканирования g. Для третьей модели сканирование происходит в
плоскости, проходящей через линию измерения первой модели и перпендикуляр к
проекции этой линии на базовой плоскости, лежащий в базовой плоскости (рис. 2).
Для
центрального луча третьей модели (g = 0) справедливы формулы указанные для первых двух
моделей, а также для четвёртой при замене a на 2a.
Измерения в секторе сканирования производятся для фиксированных углов
сканирования ![]() , где k = 0, 1, 2, …, N,
, где k = 0, 1, 2, …, N, ![]() - называется дискретностью
сканирования, угол
- называется дискретностью
сканирования, угол ![]() , где
, где ![]() , называется растром
сектора сканирования. При непрерывном изменении угла сканирования g на БП будет
отслежен скан. Для третьей модели
скан представляет собой отрезок, для четвёртой – «срез» поверхности конуса БП.
, называется растром
сектора сканирования. При непрерывном изменении угла сканирования g на БП будет
отслежен скан. Для третьей модели
скан представляет собой отрезок, для четвёртой – «срез» поверхности конуса БП.
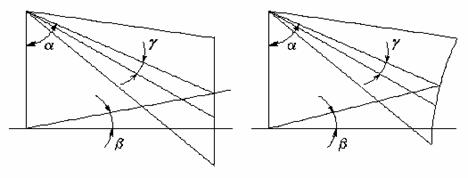
Рис. 2. Схема
третьей и четвёртой модели
Направления
измерений задаются следующими формулами
·
для третьей
модели:
![]() ,
,
![]() ,
,
![]()
·
для четвёртой
модели:
![]() ,
,
![]() ,
,
![]()
Указанные
четыре схемы сканирование реализованы в разработанном программном комплексе.
Учитывая, что на характер исследований используемая схема не влияет, дальнейшие
эксперименты проводятся по первой схеме сканирования.
2.
ГОРИЗОНТАЛЬНАЯ «ИНТЕРЕФЕРЕНЦИЯ»
В
разработанном программном комплексе расчёт дискретности осмотра в трёхмерном
случае реализован на основе теоремы о типах экстремальных точек (ТЭТ 3D) [2].
Получения
зависимости дискретности осмотра от положения на базовой плоскости заключается
в задании прямоугольной области Ω и
перемещении её с определённым шагом ΔΩ в направлении движения МР (рис. 3). В этой прямоугольной
области определяется дискретность как
размер ε-сети.
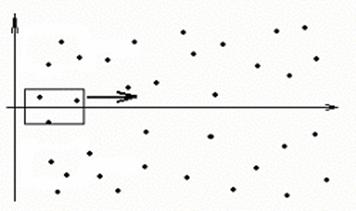
Рис. 3. Методика оценки дискретности осмотра в
трёхмерном случае
В
зависимости от условий задачи могут изменяться как количество перемещаемых
областей Ω, так и их размер. Например, область Ω может определяться габаритами
МР, а расположение области Ω – расположением колёс движителя МР.
Ниже
приведены результаты моделирования измерительной сети (рис. 4 а, рис. 5 а) и
зависимости дискретности осмотра от положения МР на базовой плоскости (рис. 4
б, рис. 5 б).
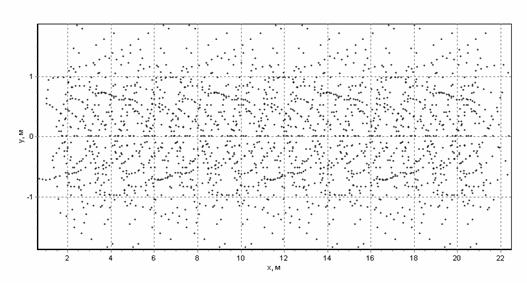
Рис. 4 а. H =
ωα = 30 ˚/c, ωβ = 45
˚/c, n = 10 Гц, Ω= 0,5 ×

Рис. 4 б

Рис. 5 а. H =
ωα = 45 ˚/c,
ωβ = 30 ˚/c, n = 10 Гц, Ω= 0,5 ×
где H -
высота МР, V - скорость МР, R
- начальное расстояние до зоны обзора,
L - длина
зоны обзора, ωα,
ωβ – угловые скорости, T – количество
периодов.

Рис. 5 б
3. ГРУППОВАЯ
«ИНТЕРФЕРЕНЦИЯ»
Учёт
явления «интерференции» позволяет серьёзно улучшить значение дискретности
благодаря учёту групповой «интерференции». Групповая «интерференция» может быть
получена в двух случаях:
1.
на общей
измерительной сети группы мобильных роботов
2.
на общей
измерительная сети мобильного робота с несколькими дальномерами с пересекающимися
ИС
Для обоих
случаев возможен вариант при котором учитывая, что по краям измерительной сети
(например Рис. 4 а для точек BC с
координатами y>1 и y<1) дискретность осмотра больше чем в центральной
части, то благодаря пересечению краевых областей измерительной сети двух
роботов, движущихся параллельными курсами или двух дальномеров на одном роботе
и учёту явления «интерференции» можно достичь уменьшения дискретности в этой
области.
Групповая
ИС для двух измерителей с ИС приведённой на рис. 4 а, расположенных в двух метрах друг от друга по
координате y представлена на рис. 6.
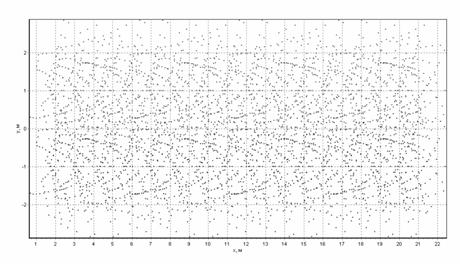
Рис. 6
Как
видно из рисунка групповой ИС плотность в объединённых краевых частях ИС
соизмерима с плотностью центральной
части .
Таким
образом, если дискретность в краевой области при расчёте в пробном прямоугольнике
2<y<2.5 была равна

Рис. 7
то за счёт групповой «интерференции»
при расчёте в области -0.25<y<0.25 она
снизилась до
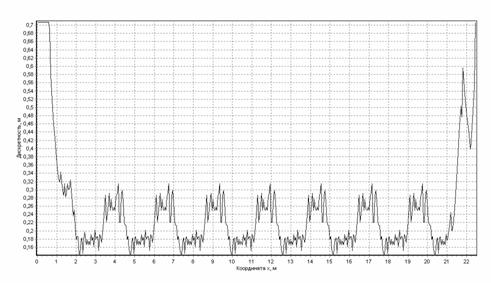
Рис. 8
Так же роботы
могут суммировать свои ИС при движении друг за другом. В этом случае можно
рассчитывать на снижение дискретности осмотра у преследующего МР.
Для
иллюстрации этого варианта за роботом с ИС указанной на рис. 4а с дискретностью
осмотра равной

Рис. 9
В
результате наложения измерительных сетей результирующая дискретность составила
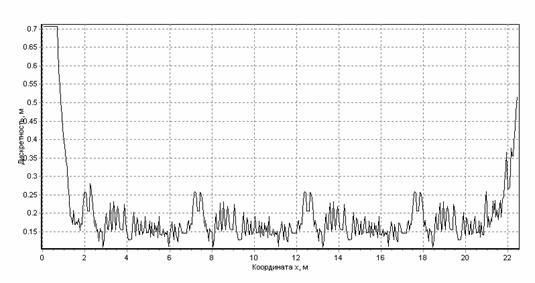
Рис. 10
ЗАКЛЮЧЕНИЕ
В
работе получены следующие результаты:
1. Разработан пакет прикладных программ для
исследования явления «интерференции» дальномерных измерений в трехмерном
случае.
2. Проведено предварительное исследование явления
«интерференции» дальномерных измерений для одной из кинематических схем
лазерной дальномерной обзорно-информационной системы.
3. Проведено предварительное исследование явления
«интерференции» для случая двух движущихся мобильных роботов.
На основе
полученных результатов может быть сделан вывод, что для рассматриваемой
кинематической схемы и рассматриваемого набора параметров дальномерной системы
и мобильных роботов за счет явления «интерференции» пробная дискретность
осмотра уменьшается более чем в 2 раза.
ЛИТЕРАТУРА
1.
Безбогов С.А., Кирильченко А.А.,
Степанов Ю.И., Трубицин О.Н., Пряничников В.Е. Разработка военных мобильных
роботов в США. //Препринт Ин-та прикл.матем. им. М.И.Келдыша РАН, 1994, N 11. –36 с.
2.
Джегутанов Ф.Р., Кирильченко А.А.,
Исследование явления «интерференции» дальномерных измерений для мобильного
робота//М.: Препринт Ин-та прикл. матем. им. М.В. Келдыша РАН, 2003,
№74.
3.
Охоцимский Д.Е., Веселов В.А.,
Донцов В.Е., Кузнецов В.Г., Платонов А.К., Кирильченко А.А. и др.
Обзорно-информационная система макета мобильного робота. //М.: Препринт Ин-та
прикл. матем. им.М.В.Келдыша АН СССР, 1982, N 45, 28 с.
4.
Ипатов О.С., Кононов О.А., Кузнецов
В.Г., Кирильченко А.А. и др. Светолокационные системы технического зрения
мобильных роботов //М.: Препринт Ин-та прикл. матем. им.М.В.Келдыша АН СССР,
1990, N 85.-34 с.
5.
Барбашова Т.Ф., Кирильченко А.А., Ярошевский В.С., Яшкичев И.В. Условия согласования
информационно-двигательных параметров мобильного робота при осмотре среды //М.:
Препринт Ин-та прикл. матем. им.М.В.Келдыша АН СССР, 1988, N 190, 29 с.
6. Каргашин А.Ю., Кирильченко А.А.,
Ярошевский В.С. Оценка дисретности осмотра среды дальномерно информационной
системой мобильного робота. //М.:
Препринт Ин-та прикл. матем. им. М.В.Келдыша АН СССР, 1991, N 82.-26 с.