Задача обнаружения подвижных объектов при информационном мониторинге динамической среды
распределённой мобильной системой
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
СОДЕРЖАНИЕ |
|
|
|
стр. |
|
Введение
………………………………………………………………………... |
3 |
|
1. Постановка задачи
…………………………………………………………... |
4 |
|
2. Элементы теории
террайнов ………………………………………...….…... |
4 |
|
3. Общая схема алгоритма
решения задачи информационного мониторинга подвижных
объектов мобильными роботами ………………… |
5 |
|
4. Концепция виртуальных
датчиков ……………………………..…………... |
6 |
|
4.1. Виртуальный датчик
определения движущихся объектов ……………... |
6 |
|
4.2. Детектор «свой-чужой»
…………………………………………………… |
6 |
|
4.3. Детектор определения двери
……………………………………………... |
6 |
|
5.
Информационно-двигательное поведение элементов распределённой мобильной
системы …………………………………………. |
7 |
|
5.1. Нейросетевой алгоритм
управления движением мобильного робота …. |
7 |
|
5.1.1. Нейросетевой
алгоритм движения мобильного робота ………………. |
7 |
|
5.1.2. Оценка эффективности
алгоритма и результаты моделирования …… |
9 |
|
5.1.3. Выбор события
окончания движения ………………………………….. |
9 |
|
5.2.
Информационно-двигательные действия ………………………………... |
9 |
|
5.3.
Информационно-двигательные процедуры ……………………………... |
10 |
|
5.3.1. Процедура захода в
дверь
………………………………………………. |
10 |
|
5.3.2. Процедура подхода к «лидеру»
………………………………………... |
10 |
|
5.3.3. Процедура подхода к цели на открытой
границе «лидера» …………. |
11 |
|
5.3.4. Процедура косвенной встречи
…………………………………………. |
11 |
|
6. Алгоритм решения задачи
информационного мониторинга подвижных объектов мобильными
роботами и его численное моделирование …………………………………………………………………. |
12 |
|
6.1. Алгоритм решения
задачи информационного мониторинга подвижных объектов
мобильными роботами ………………………………... |
12 |
|
6.2. Численное
моделирование алгоритма решения задачи информационного мониторинга
подвижных объектов мобильными роботами
………………………………………………………… |
13 |
|
Заключение
……………………………………………………………………... |
14 |
|
Литература
……………………………………………………………………… |
15 |
|
Рисунки
…………………………………………………………………………. |
17 |
Введение
Рассматривается
задача информационного мониторинга подвижных объектов мобильными роботами. Она
заключается в том, что элементы
распределённой мобильной системы осуществляют обход некоторой ограниченной среды,
называемой террайном [1], так, чтобы ни один объект (в том числе движущийся) не
остался незамеченным. Эта задача в определенном смысле является
аналогом задачи Парсонса на конечном графе, которая заключается в блокировании
фишки “бандита” фишками-“полицейскими” [2]. Отличие нашей постановки
заключается, во-первых, в том, что рассматривается движение МР в непрерывной
среде с препятствиями, а, во-вторых, цель действия РМС заключается в обнаружении
(фиксировании) информационными системами
(ИС) МР как структуры среды, так и возможных подвижных объектов в ней (а
не в механическом блокировании).
БЛАГОДАРНОСТИ
Авторы выражают признательность
А.К.Платонову, В.Е. Павловскому и С.М.Соколову за поддержку исследований и
плодотворные творческие дискуссии.
1. ПОСТАНОВКА ЗАДАЧИ
Задана ограниченная рамкой область плоскости,
являющаяся носителем террайна – толерантного пространства с заданным отношением
видимости, внутри которой расположены препятствия, представляющие собой
замкнутыми непересекающимися многоугольниками с углами ![]() и
и ![]() (рис. 1) [3-5]. По
террайну передвигаются объекты, местоположение которых заранее неизвестно. Эти
объекты имеют фиксированные размеры. Мобильные роботы (МР), входящие в состав
распределённой мобильной системы (РМС) заходят в террайн. Каждый МР оснащен
дальномерной системой, состоящей из двух дальномеров бесконечного радиуса видимости,
дискретностью осмотра
(рис. 1) [3-5]. По
террайну передвигаются объекты, местоположение которых заранее неизвестно. Эти
объекты имеют фиксированные размеры. Мобильные роботы (МР), входящие в состав
распределённой мобильной системы (РМС) заходят в террайн. Каждый МР оснащен
дальномерной системой, состоящей из двух дальномеров бесконечного радиуса видимости,
дискретностью осмотра ![]() и
и ![]() (
(![]() , т.к. при обнаружении ориентира или движущегося объекта
требуется произвести измерение с меньшей дискретностью), углом видимости
, т.к. при обнаружении ориентира или движущегося объекта
требуется произвести измерение с меньшей дискретностью), углом видимости ![]() и частотой осмотра
и частотой осмотра ![]() и
и ![]() (
(![]() ). Размеры МР также фиксированы, но они больше чем размеры
перемещающихся объектов. Элементы РМС используют гибридную навигационную
систему, состоящую из интерпретирующей навигации и системы счисления пути.
Предполагается, что объём РМС неограничен, т.е. всегда есть резерв МР. Движение
элементов РМС происходит последовательно (в каждый момент времени передвигается
только один элемент РМС).
). Размеры МР также фиксированы, но они больше чем размеры
перемещающихся объектов. Элементы РМС используют гибридную навигационную
систему, состоящую из интерпретирующей навигации и системы счисления пути.
Предполагается, что объём РМС неограничен, т.е. всегда есть резерв МР. Движение
элементов РМС происходит последовательно (в каждый момент времени передвигается
только один элемент РМС).
Задача
информационного мониторинга подвижных объектов мобильными роботами заключается
в том, что элементы распределённой мобильной системы осуществляют обход
террайна так, чтобы ни один объект (в том числе движущийся) не остался
незамеченным, т.е. цель действия РМС заключается в обнаружении (фиксировании)
информационными системами (ИС) МР как геометрической структуры среды, так и
возможных подвижных объектов в ней.
2. ЭЛЕМЕНТЫ ТЕОРИИ ТЕРРАЙНОВ
Введём
понятие отношения видимости на множестве ![]() :
: ![]() и
и ![]() связаны отношением
видимости
связаны отношением
видимости ![]() , если
, если ![]() (при этом может быть
(при этом может быть ![]() ). На основе этого отношения введём следующие понятия:
). На основе этого отношения введём следующие понятия:
Отрезок ![]() называется касательным,
если:
называется касательным,
если:
-
он максимален для
данного террайна, т.е. в направлении из ![]() в
в ![]()
![]() является максимально
удалённой видимой из
является максимально
удалённой видимой из ![]() точкой;
точкой;
-
на интервале ![]() есть как граничные
точки, так и внутренние точки террайна.
есть как граничные
точки, так и внутренние точки террайна.
Отрезок ![]() называется выходным, если:
называется выходным, если:
-
![]() строго входит в некоторый
касательный отрезок;
строго входит в некоторый
касательный отрезок;
-
![]() и
и ![]() являются граничными
точками террайна;
являются граничными
точками террайна;
-
интервал ![]() состоит только из
внутренних точек террайна.
состоит только из
внутренних точек террайна.
Если выходной
отрезок ![]() строго входит в
касательный отрезок
строго входит в
касательный отрезок ![]() , а точка
, а точка ![]() расположена на этом касательном отрезке и не принадлежит
указанному выходному отрезку,
расположена на этом касательном отрезке и не принадлежит
указанному выходному отрезку, ![]() называется наблюдаемым в точке
называется наблюдаемым в точке ![]() выходным отрезком. Нетрудно заметить, что хотя бы одна из
конечных точек выходного отрезка является вершиной препятствия. Введём также
понятие открытой границы:
выходным отрезком. Нетрудно заметить, что хотя бы одна из
конечных точек выходного отрезка является вершиной препятствия. Введём также
понятие открытой границы: ![]() - открытая граница
множества
- открытая граница
множества ![]() , т.е. те участки границы множества
, т.е. те участки границы множества ![]() , через которые МР может покинуть
, через которые МР может покинуть ![]()
3. Общая схема алгоритма решения задачи информационного мониторинга
подвижных объектов мобильными роботами
Движение элементов РМС происходит под управлением ЦУ.
Общая схема этого управления показана на следующей схеме.
Возможны следующие действия центра управления (ЦУ):
Д1 – команда МР на выполнение определённого
информационно-
двигательного
действия (ИДД);
Д2– команда МР на выполнение определённой
информационно-
двигательной
процедуры (ИДП);
Д3 – проверка на ситуацию косвенной
встречи;
Во время выполнения ИПП и ИДП МР действуют автономно.
Возможные действия МР в автономном режиме перечислены ниже и описываются в последующих
частях:
ИДД1 – проведение сеанса измерений – обнаружение
выходных отрезков и дверей;
ИДД2 – движение вдоль стены до наступления события;
ИДД3 – движение к относительному
локальному признаку ориентира до наступления события;
ИДП1 – заход в дверь;
ИДП2 – подход к «лидеру»;
ИДП3 – подход к подцели;
На основе введенных обозначений движение МР можно
описать следующей цепочкой действий:
![]()
4. КОНЦЕПЦИЯ
ВИРТУАЛЬНЫХ ДАТЧИКОВ
Виртуальные датчики (ВД) [6-8,17-19], являются
обобщением понятия логического датчика [6,17] и вычислительного модуля. В
каждом ВД, наряду с сенсорными, выполняются
вычислительные операции. Непосредственно сенсорные операции ВД может и
не выполнять, а использовать информацию, полученную от других ВД. Нижний
уровень составляют физические датчики (ФД). На следующем уровне расположены ВД
– драйверы, обеспечивающие настройку на конкретные типы ФД (возможно с некоторой
предварительной обработкой информации). Это позволяет при программировании
верхнего уровня системы управления не учитывать специфики уровня ФД.
В данной работе было использовано четыре виртуальных
датчика (ВД) - виртуальный датчик
определения движущихся объектов, детектор «свой - чужой», детектор двери и
детектор коридора. На нижнем уровне всех датчиков имеется последовательность
измерений в зоне осмотра от дальномера. На рис. 2 представлена принципиальная
схема функционирования ВД.
4.1. ВИРТУАЛЬНЫЙ
ДАТЧИК ОПРЕДЕЛЕНИЯ ДВИЖУЩИХСЯ
ОБЪЕКТОВ
Для
решения поставленной задачи МР, входящие в состав РМС, должны «уметь»
обнаруживать любые движущиеся объекты, попадающие в их зону осмотра. Для этого
служит виртуальный датчик определения движущихся объектов. Его общая блок схема
представлена на рис. 3.
4.2.
ДЕТЕКТОР «СВОЙ - ЧУЖОЙ»
Для решения задачи также необходима
реализация на основе виртуального датчика движущихся объектов детектора
распознавания «свой – чужой». Было принято решение организовать такое
распознавания на основе оценки размеров движущихся объектов, т.к. предполагается,
что линейные размеры элементов РМС в четыре раз больше линейных размеров
обнаруживаемых элементами РМС объектов. В связи с этим использовалось следующее
условие на определение линейных размеров объектов:
|
|
(1) |
где
![]() - линейный размер объекта,
- линейный размер объекта, ![]() - количество лучей
попавших на объект,
- количество лучей
попавших на объект, ![]() - средняя длина луча,
попавшего на объект.
- средняя длина луча,
попавшего на объект.
4.3.
ДЕТЕКТОР ОПРЕДЕЛЕНИЯ ДВЕРИ
Было установлено, что для решения задачи элементы РМС,
используя дальномерные данные, должны
правильно распознавать такую особенность террайна как двери. Предположим, что
двери имеют заданную ширину - ![]() , тогда алгоритм детектора двери выглядит следующим образом:
, тогда алгоритм детектора двери выглядит следующим образом:
1. Получить от дальномерной системы массив дальностей ![]() ;
;
2. Выделить массив локальных относительных признаков ![]() . Каждому
. Каждому ![]() соответствует элемент
массива дальностей
соответствует элемент
массива дальностей ![]() ;
;
3. Если (![]() =скачок от) или (
=скачок от) или (![]() =скачок к) или (
=скачок к) или (![]() =выпуклый угол), то
проверяются условие соответствия расстояния между ориентиром
=выпуклый угол), то
проверяются условие соответствия расстояния между ориентиром ![]() и всеми другими ориентирами ширине двери.
и всеми другими ориентирами ширине двери.
5. ИНФОРМАЦИОННО-ДВИГАТЕЛЬНОЕ ПОВЕДЕНИЕ РАСПРЕДЕЛЁННОЙ
МОБИЛЬНОЙ СИСТЕМЫ
Информационно-двигательное поведение
РМС при решении задачи имеет иерархию, представленную на рис 4.
Нижний уровень иерархии
информационно-двигательного поведения РМС состовляют информационно-двигательные
операции (ИДО). Выделено три типа ИДО: нейросетевой
алгоритм движения МР, цель движения
и событие окончания движения.
Рассмотрим каждую ИДО подробнее.
5.1. ИНФОРМАЦИОННО-ДВИГАТЕЛЬНЫЕ ОПЕРАЦИИ
5.1.1. Нейросетевой алгоритм
управления движением мобильного робота
Система управления нижнего уровня МР должна быть
построена таким образом, что бы обеспечить достаточно гладкое передвижение МР.
В её основе лежит нейросетевой аппарат, использующий сведения, полученные от
измерительной системы МР. Система управления состоит из: блока
преобразования локальной карты местности, нейронной сети для определения возможных направлений движения МР и блок выделения точного направления движения
МР [9-12].
В качестве входной информации блок преобразования
использует сжатую карту местности, состоящую из 61 элемента (рис. 5),
соответствующих либо одному лучу дальномера, либо нескольким лучам, попавшим в
заданный сектор обзора (размер сектора принимается равным 3°).
Технология преобразования состоит в том, что если
препятствие находится в зоне видимости дальномера, то, соответствующие элементы
![]() устанавливаются в
единичное значение, в противном случае – в нулевое значение. В результате
получается бинарный массив, который характеризует наличие в заданной области
препятствий.
устанавливаются в
единичное значение, в противном случае – в нулевое значение. В результате
получается бинарный массив, который характеризует наличие в заданной области
препятствий.
Структура блока преобразования представляет собой один слой пороговых нейронных
элементов со следующей функцией активации:
|
|
|
где
![]() - порог видимости дальномера.
- порог видимости дальномера.
Для
определения возможных направлений движения служит трёхслойная нейронная сеть с прямыми связями. На её вход подаётся
бинарный массив, полученный блоком преобразования карты местности. Как видно из
рисунка, входной слой имеет 61 нейронов, выполняющих распределительные
свойства; скрытый слой содержит 10 нейрона с сигмоидной функцией активации и выходной
слой состоит из 29 нейронов, также с сигмоидной функцией активации:
|
|
|
Задача
нейронной сети состоит в том, чтобы «запомнить» ряд стандартных ситуаций и в
процессе функционирования относить неизвестные ситуации к одной из стандартных.
Команды управления роботом были следующими: поворот влево на ![]() ; поворот вправо на
; поворот вправо на
![]() ; продвижение вперёд
на
; продвижение вперёд
на ![]() ; продвижение назад
на
; продвижение назад
на ![]() .
.
Для
запоминания была сформирована обучающая выборка, состоящая из 29 ситуаций.
Генерация обучающей выборки вытекает из логики работы данной сети. В таблице 1
приведены некоторые тренировочные наборы. Для обучения НС применялся алгоритм обратного
распространения ошибки с нормой обучения 0.25 и коэффициентом инерции 0.4.
После 10365 итераций суммарная ошибка составила 0.0083.
Таблица 2.
Тренировочные наборы
|
№ |
Входной паттерн |
Выход. паттерн |
|
1 2 3 4 5 6 |
1111111111111111111111111111111111111111111111111111111111111 1111111111111111000000000000000000000000000000000000000000000 0000000000000000000000000000000000000000000001111111111111111 1111111111111111000000000000000000000000000001111111111111111 0000000000000000000000000000000000000000000000000000000000000 1111111111111111000000000000000000000011111111111111100000000 |
0001 0110 1010 0010 1110 0110 |
Как видно
из таблицы 2 возможных направлений движения для данной ситуации может быть
несколько. Для определения одного направления предназначен блок выделения точного направления движения МР. Суть работы этого
блока: определить, в соответствии с направлением на цель, точное направление
движения МР.
Приведём
пример работы сети. Пусть МР находится в среде, изображённой на рис. 5, также
на рисунке изображён бинарный массив ![]() , соответствующий этой ситуации. При подачи его на вход НС на
выходе получим массив состоящий соответственно из 29 элементов. Найдём номер
максимального элемента (элемента победителя) - №6,т.е. данная ситуация «похожа»
на известную ситуация №6 . В этой ситуации МР может двигаться прямо и направо. Так как целевая точка О
находиться справа от робота, то в результате работы алгоритма будет
произведён поворот направо на
, соответствующий этой ситуации. При подачи его на вход НС на
выходе получим массив состоящий соответственно из 29 элементов. Найдём номер
максимального элемента (элемента победителя) - №6,т.е. данная ситуация «похожа»
на известную ситуация №6 . В этой ситуации МР может двигаться прямо и направо. Так как целевая точка О
находиться справа от робота, то в результате работы алгоритма будет
произведён поворот направо на ![]() .
.
Эффективность
алгоритма определялась как отношение пройденного роботом пути от начальной
точки к целевой к минимальному пути между этими точками. Это отношение
вычислялось для движения МР вдоль стены при различных начальных положениях МР (a=20°,40°,60°,80° - угол с горизонталью), для различной
дискретности угловой скорости (![]() =3°,7°,9°,11°,13°) и для разных расстояний от стены.
Расстояние между начальной и целевой точкой было 5 корпусов робота. Результаты
моделирования приведены в следующих таблицах. Данные таблиц представлены на
рис. 6 - 8.
=3°,7°,9°,11°,13°) и для разных расстояний от стены.
Расстояние между начальной и целевой точкой было 5 корпусов робота. Результаты
моделирования приведены в следующих таблицах. Данные таблиц представлены на
рис. 6 - 8.
|
a=20°
Таблица 3 |
a=40° Таблица 4 |
|||||||||
|
|
1 корпус |
2 корпуса |
3 корпуса |
|
|
1 корпус |
2 корпуса |
3 корпуса |
||
|
3° |
1,00060 |
1,0006 |
1,00048 |
|
3° |
1,00015 |
1,0001 |
1,00015 |
||
|
7° |
1,00122 |
1,0072 |
1,00723 |
|
7° |
1,00125 |
1,0111 |
1,01111 |
||
|
9° |
1,00122 |
1,0006 |
1,0006 |
|
9° |
1,00326 |
1,0080 |
1,00807 |
||
|
11° |
1,0315 |
1,0180 |
1,0180 |
|
11° |
1,0155 |
1,0130 |
1,0130 |
||
|
13° |
1,01633 |
1,0175 |
1,0175 |
|
13° |
1,00012 |
1,0001 |
1,0001 |
||
|
a=60° Таблица 5 |
a=80° Таблица 6 |
|||||||||
|
|
1 корпус |
2 корпуса |
3 корпуса |
|
|
1 корпус |
2 корпуса |
3 корпуса |
||
|
3° |
1 |
1 |
1 |
|
3° |
1,00820 |
1,0174 |
1,00060 |
||
|
7° |
1,00180 |
1,0110 |
1,01109 |
|
7° |
1,00765 |
1,0023 |
1,01139 |
||
|
9° |
1,00219 |
1,0186 |
1,01863 |
|
9° |
1,00819 |
1,0183 |
1,01938 |
||
|
11° |
1,0048 |
1,0121 |
1,0121 |
|
11° |
1,0066 |
1,0073 |
1,0126 |
||
|
13° |
1,0028 |
1,0121 |
1,0181 |
|
13° |
1,0044 |
1,0081 |
1,0006 |
||
5.1.2. Выбор
цели движения
Под целью движения понимается достижимая или не
достижимая точка, выбираемая в видимой окрестности МР (![]() -окрестность МР), для достижения того или иного информационно-двигательного
действия (см. ниже).
-окрестность МР), для достижения того или иного информационно-двигательного
действия (см. ниже).
В результате анализа было решено выделить две
возможные цели движения: 1. недостижимая
точка, выбираемая внутри препятствии; 2. видимый относительный локальный признак ориентира;
5.1.3. Выбор события окончания движения
Событиями окончания движения были выбраны: 1. истечение заданного промежутка времени;
2. прохождение заданного расстояния;
3. появление заданного ориентира; 4. подход к заданному ориентиру на заданное
расстояние.
5.2. ИНФОРМАЦИОННО-ДВИГАТЕЛЬНЫЕ ДЕЙСТВИЯ
Как говорилось выше интерпретирующая
навигация это форма двигательного поведения на основе выполнения определённых
информационно-двигательных действий (ИДД). Набор ИДД должен обеспечивать
выполнение функциональной задачи, в данном случае задачи информационного
мониторинга подвижных объектов.
ИДД являются следующим уровнем
иерархии информационно-двигательного поведения РМС. Каждое ИДД образуются с
помощью указания для алгоритма движения МР цели движения и события его
окончания. Было выделено два ИДД:
- движение вдоль стены до наступления события;
- движение к относительному локальному признаку ориентира до наступления
события.
Возможные события перечисленны в пп.
5.1.3.
5.3. ИНФОРМАЦИОННО-ДВИГАТЕЛЬНЫЕ ПРОЦЕДУРЫ
Предпоследним уровнем иерархии
являются информационно-двигательные процедуры (ИДП), которые строются из ИДД.
Одной из важнейших (с точки зрения решения функциональной задачи) ИДП является процедура косвенной встречи. Также были
выделены ещё три ИДП.
1. Процедура захода в дверь;
2. Процедура подхода к «лидеру»;
3. Процедура подхода к цели на открытой границы видимой окрестности «лидера».
5.3.1. Процедура захода в дверь
Данная процедура выполняет ряд ИДД, обеспечивающих
проход МР’а в видимую дверь, имеющую стандартные ширину - ![]() и толщину -
и толщину - ![]() . Для её выполнения МР должен видеть один из ориентиров
. Для её выполнения МР должен видеть один из ориентиров ![]() двери: скачок от, скачок к или выпуклый угол).
двери: скачок от, скачок к или выпуклый угол).
1. Если (![]() = скачок от) или
(
= скачок от) или
(![]() = скачок к), то для
прохода в дверь необходимо выполнить следующую последовательность ИДД (рис. 9
а):
= скачок к), то для
прохода в дверь необходимо выполнить следующую последовательность ИДД (рис. 9
а):
1.1. Подход к ориентиру ![]() на расстояние
на расстояние ![]() ;
;
1.2. Обход ориентира ![]() по кругу;
по кругу;
1.3. Движение вдоль стены на расстояние ![]() , где
, где ![]() - наперёд заданная константа
- наперёд заданная константа
2. Если (![]() =выпуклый угол), то
для прохода в дверь необходимо выполнить следующую последовательность ИДД (рис.
9 б):
=выпуклый угол), то
для прохода в дверь необходимо выполнить следующую последовательность ИДД (рис.
9 б):
2.1. Подход к ориентиру ![]() на расстояние
на расстояние ![]() ;
;
2.2. Движение вдоль стены на расстояние ![]() ,
,
5.3.2.
Процедура подхода к «лидеру»
Данная процедура предназначена для подхода роботов из
резерва к «лидеру» - вызывающему роботу. Так как движение МР организуется с
помощью ИДД, то, запоминая этот набор действий МР «запоминает» путь из
исходного местоположения в текущее. Для того чтобы МР из резерва смог подойти к
«лидеру», «лидеру» необходимо передать набор выполненных им ИДД..
5.3.3.
Процедура подхода к цели на открытой границе «лидера»
Из того, что ![]() и два стоящих рядом МР
образуют псевдоядро видимости, т.е.
и два стоящих рядом МР
образуют псевдоядро видимости, т.е. ![]() следует, что для
подхода МР к цели открытой границе «лидера» достаточно передать МР’у путь от
местоположения «лидера» к этой цели на языке интерпретирующей навигации.
следует, что для
подхода МР к цели открытой границе «лидера» достаточно передать МР’у путь от
местоположения «лидера» к этой цели на языке интерпретирующей навигации.
5.3.4.
Процедура косвенной встречи
Процедура косвенной встречи служит для удаления из
открытой границы МР тех её участков, которые видимы другими роботами,
находящимися в террайне. Так как в основе управляющей системы элемента РМС
лежит алгоритм гибридной навигации, совмещающий свойства интерпретирующей
навигации (ИН) и системы счисления пути, то координаты открытой границы,
состоящей из выходных отрезков, можно определить в абсолютной системе
координат. Благодаря этому появляется возможность определить, видят ли другие
элементы РМС какую-либо часть открытой границы рассматриваемого МР.
Выполнение процедуры сводится к следующему. Пусть для
МР, находящемуся в точке ![]() (рис. 10 а),
запускается процедура косвенной встречи с МР, расположенным в точке
(рис. 10 а),
запускается процедура косвенной встречи с МР, расположенным в точке ![]() . МР1 осматривает свою видимую окрестность, выделяет открытую
границу – выходные отрезки
. МР1 осматривает свою видимую окрестность, выделяет открытую
границу – выходные отрезки ![]() и запоминает координаты
их вершины -
и запоминает координаты
их вершины - ![]() и
и ![]() в абсолютной системе
координат. После этого производит осмотр второй МР – МР2. Целью осмотра является
проверка условий:
в абсолютной системе
координат. После этого производит осмотр второй МР – МР2. Целью осмотра является
проверка условий: ![]() и
и ![]()
![]() , т.е. условий того, что т.
, т.е. условий того, что т. ![]() (
(![]() ) видны из т.
) видны из т. ![]() . Если это условие выполняется, то осуществляется проверка
того факта, что
. Если это условие выполняется, то осуществляется проверка
того факта, что ![]() (
(![]() ) виден из т.
) виден из т. ![]() . Для этого каждый луч
. Для этого каждый луч ![]()
![]() , находящийся между
лучами
, находящийся между
лучами ![]() и
и ![]() должен пересекать отрезок
должен пересекать отрезок
![]() . Это будет выполняться в случае, когда координаты т.
. Это будет выполняться в случае, когда координаты т. ![]() (
(![]() - точка пересечения луча
- точка пересечения луча ![]() с отрезком
с отрезком ![]() ) в абсолютной системе координат будут удовлетворять
следующему уравнению:
) в абсолютной системе координат будут удовлетворять
следующему уравнению:
 ,
,
где
![]() - координаты т.
- координаты т.![]() в АСК,
в АСК, ![]() - координаты т.
- координаты т.![]() в АСК и
в АСК и ![]() - координаты т.
- координаты т.![]() в АСК (рис. 10 б). Если для каждой из т.
в АСК (рис. 10 б). Если для каждой из т. ![]() это условие выполняется,
то можно утверждать, что выходной отрезок
это условие выполняется,
то можно утверждать, что выходной отрезок
![]() наблюдается из т.
наблюдается из т.![]() и он удаляется из открытой границы т.
и он удаляется из открытой границы т.![]() .
.
Следует
отметить, что любой обнаруженной двери, кроме её координат в АСК, сопоставляется
параметр, принимающий два значения: 1 если сквозь эту дверь уже проходил МР и
0, если нет. Пусть теперь МР наблюдает дверь. СУ МР проверяет значение
параметра, соответствующее этой двери и если оно равно 1, то выбрасывает эту
дверь из своей открытой границы, иначе оставляет.
Такая процедура выполняется для каждого выходного
отрезка т.![]() и каждой видимой из т.
и каждой видимой из т.![]() двери. Итогом работы процедуры служат отфильтрованные
выходные отрезки, которые полностью наблюдаются только из т.
двери. Итогом работы процедуры служат отфильтрованные
выходные отрезки, которые полностью наблюдаются только из т.![]() и двери, через которые еще не проходили другие элементы РМС.
и двери, через которые еще не проходили другие элементы РМС.
6. АЛГОРИТМ РЕШЕНИЯ Задачи информационного мониторинга подвижных
объектов мобильными роботами И ЕГО ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ
6.1. АЛГОРИТМ РЕШЕНИЯ
Задачи информационного мониторинга подвижных объектов мобильными
роботами
Существуют различные схемы алгоритмов решения задачи
информационного мониторинга, определяемые априорными условиями, накладываемыми
на структуру МР и системы управления. В общем виде решение задачи задаётся по
следующей схеме:
1. Показано, что допустимая конфигурация РМС в террайне
достигается за конечное число шагов [13].
2. Если задана недостижимая конфигурация, осуществляется
информационный обход среды.
3. Если при этом непрерывно работают информационные
системы с достаточным радиусом действия и имеется резерв МР, то осуществляется
решение поставленной задачи.
Исследования систем управления РМС показывают, что
одним из возможных способов управления РМС является центральное управление
последовательное (ЦУПос) [13]. В этом случае центр управления связан с каждым
элементом группы непосредственно, и шагом работы системы управления является
движение одного элемента РМС. В данной работе использовался именно такой способ
управления. Ниже изложена оригинальная схема алгоритма решения задачи
информационного мониторинга подвижных объектов мобильными роботами, разрешающая
конфликты одновременного наблюдения участков открытой границы.
0.
Заход в каждую из входных дверей по МР;
1. В
соответствии с выбранным типом управления выбирается текущий «лидер» - МРi;
2. Для «лидера»
выполняются следующие действия:
2.1.
Осмотр «лидером» своей видимой окрестности, фиксация
всех движущихся объектов и выделение открытой границы и дверей;
2.2.
Получение координат выходных отрезков и дверей, полученных
в п. 2.1. в абсолютной системе координат;
2.3.
Для всех ![]() , где
, где ![]() - суммарное количество МР, находящихся в террайне, таких что
- суммарное количество МР, находящихся в террайне, таких что ![]() выполняются следующие
действия:
выполняются следующие
действия:
2.3.1. Флаг_выхода := true;
2.3.2. МРj производит своей осмотр видимой окрестности;
2.3.3. Инициализируется
процедура косвенной встречи;
2.3.4. Для
оставшихся выходных отрезков и дверей выполняются следующие действия:
2.3.4.1.
Флаг_выхода :=
false;
2.3.4.2.
Инициализируется процедура подхода к «лидеру»;
2.3.4.3.
Инициализируется процедура подхода к выходному отрезку
или захода в дверь;
3. Если
Флаг_выхода := true,
то
алгоритм заканчивает работу,
иначе к
п.1.
6.2.
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ АЛГОРИТМА РЕШЕНИЯ Задачи информационного мониторинга
подвижных объектов мобильными роботами
Ниже приведены результаты моделирования работы
алгоритма.
Буфер МР находиться в точке расположения МР0 (рис. 11).
Неизвестные объекты обозначены римскими цифрами I, II и III. При осмотре видимой окрестности МР0 обнаруживает два
выходных отрезка А и В и посылает на середины этих выходных отрезков МР1 и МР2
соответственно. МР1 приходит к цели раньше, чем МР2 и производит осмотр своей
видимой окрестности, при этом он обнаруживает три новые двери: A, B и C и вызывает на них по новому МР: МР3, МР4, МР5
соответственно (рис. 12). Выходной отрезок по которому он пришёл отбрасывается,
так как его «видит» как МР0, так и МР2. МР2, производя осмотр, также обнаруживает
двери A, B и C, но они уже были замечены МР1 и следовательно МР2 не
вызывает на них новых роботов. В время движения МР3, МР4 и МР5 к своим целям,
т.е. к дверям A, B и C
соответственно, остальные роботы (МР0, МР1, МР2) производят осмотр своей
видимой границы и МР2 обнаруживает движущийся объект номер I (рис. 13). Когда МР5 подходит к своей цели он
обнаруживает как неизвестный объект II, так и
объект III. Зайдя в двери, МР3, МР4 и МР5 осматривают свою
видимою границу. У МР3 и МР4 новых выходных отрезков нет (отрезков, которые не
«видят» другие МР). Однако не смотря на то, что вроде бы неизвестных объектов в
террайне больше нет, но МР5 наблюдает новый выходной отрезок А и вызывает на
его середину МР6. Придя к своей цели МР6
осматривает видимую окрестность, но никаких новых выходных отрезков и дверей не
обнаруживает (рис. 14). Такая же ситуация наблюдается у всех МР. Следовательно
алгоритм заканчивает работу. Как видно для решения задачи для этого террайна
потребовалось 7 мобильных роботов.
ЗАКЛЮЧЕНИЕ
В работе получены
следующие результаты:
- построены основные
типы виртуальных датчиков на базе дальномерных данных для решения задачи
информационного блокирования;
- приведены
структуры и алгоритмы основных информационно-двигательных операций,
информационно-двигательных действий и информационно-двигательных
процедур для решения задачи информационного блокирования;
- реализована
возможность использования для этих целей в составе системы управления
трёхслойной нейронной сети;
- разработан
алгоритм решения задачи информационного блокирования в условиях неопределённости;
На основе полученных результатов можно
сделать следующие выводы:
- основой алгоритма
решения задачи информационного блокирования в условиях неопределённости служит
использование трёх основных концепций: 1) концепция условий согласования [14];
2) концепция виртуальных датчиков; 3) концепция интерпретирующей навигации в
динамической среде [15];
- основными
информационно-двигательными действиями для решения задачи информационного
блокирования: 1) движение вдоль стены до наступления определённого события,; 2)
движение к ориентиру до наступления определённого события. Оба ИДД для повышения
точности были реализованы с использованием в структуре системы управления нейронной
сети.
Численное
моделирование проведено для числа роботов от 7 до 17 и числа подвижных объектов
от 3 до 5.
Следует отметить
следующие недостатки выбранной модели. Во-первых, на начальной стадии исследований был выбран наиболее
простой тип управления РМС: центральный последовательный. При этом управлении в
каждый момент времени передвигается только один элемент РМС. Также был выбран
бесконечный радиус видимости дальномерной системы. Однако в процессе моделирования
был выявлен существенный недостаток этого допущения, заключающийся в том, что
при увеличении радиуса видимости возникает необходимость уменьшать дискретность
осмотра, что значительно снижает скорость моделирования. Так как решение задачи
базируется на определении относительных локальных признаков среды, то при их
некорректном распознавании может происходить увеличение численности РМС.
ЛИТЕРАТУРА
1. Ахтёров А.В., Белоусов А.И., Джегутанов Ф.Р., Кирильченко А.А. Групповой поиск в лабиринте (Атлас расчётных случаев для задачи информационного блокирования). // Препринт Ин-та прикл.матем. им.М.В.Келдыша РАН, 2002, №32, 40 c.
2.
Megiddo N., Hakimi
S. L., Garey M. R., Johnson D. S., Papadimitriou C.H. The complexity of
searching a graph // J. ACM. Vol. 35, No. 1, 1988, pp. 18-44.
3. Кирильченко А.А. О представлении информационно-двигательного взаимодействия мобильного робота со средой на основе отношения видимости. // Препринт Ин-та прикл.матем. им.М.В.Келдыша АН СССР, 1987, №235, 28 c.
4. Кирильченко А.А. Интерпретация локальных относительных описаний среды мобильным роботом. // Препринт Ин-та прикл. матем. им.М.В.Келдыша АН СССР, 1983, №149, 28с.
5. Кирильченко А.А.
Обоснование алгоритмов выбора пути в условиях неопределённости // Препринт
Ин-та прикл. матем. им. М.В.Келдыша РАН, 1996, №23, 32 с.
6. Henderson T.C, Shilcrat
E. Logical sensor systems. //”J. Robotic Systems”, 1984, v. 1, No. 2, pp. 169 – 193.
7. Nicholls H.R.,
Rowland J.J., Sharp K.A.I. Virtual devices and intelligent gripper сontrol
in robotics. //”Robotica”, 1989, v. 7, # 3, pp. 199-204.
8. Платонов А.К., Кирильченко А.А., Ладынин И.Г., Ястребов В.В. Концепция виртуальных датчиков в задачах управления мобильными мехатронными системами // Труды 3-ей Международной научно-технической конференции "Современные методы и средства океанологических исследований".-М.: ИО им. П.П.Ширшова РАН, 1997.-с. 137-143.
9. Головко В.А.
Нейронные сети: обучение, организация и применение. Кн.4: Учеб. пособие для
вузов /Общая ред. А.И.Галушкина.-М.:ИПРЖР,2001.-256с.:ил.
10. Каллан Роберт
Основные концепции нейронных сетей.: Пер. с англ. –М.: Издательский дом «Вильямс»,
2001.287-с.:ил.
11. Круглов В.В.,
Борисов В.В. Искусственные нейронные сети. Теория и практика. – М.: Горячая линия
– Телеком, 2001. – 382 с.: ил:
12. Дорогов А.Ю. Быстрые нейронные сети.–СПб.:Изд-во С.-Петерб. Ун-та, 2002.– 80с.
13. Бакиров А.К.,
Кирильченко А.А. Проблемы управления распределенными мобильными системами.
//Препринт Ин-та прикл. матем. им. М.В.Келдыша РАН, 2000, N 64, 23 с.
14. Барбашова Т.Ф.,
Кирильченко А.А., Ярошевский В.С., Яшкичев И.В. Условия согласования информационно-двигательных
параметров мобильного робота при осмотре среды. //Препринт Ин-та прикл.матем.
им.М.В.Келдыша АН СССР, 1988, №190, 29
с.
15. Кирильченко А.А.,
Платонов А.К., Соколов С.М. Теоретические аспекты организации интерпретирующей
навигации мобильного робота. // Препринт Ин-та прикл. матем. им.М.В.Келдыша
РАН, 2002, №5 40с.
16. Каляев И.А.,
Гайдук А.Р., Капустян С.Г. Распределённые системы планирования действий коллективов
роботов. – М.: Янус-К, 2002. – 292 с.
17. Платонов А.К.,
Кирильченко А.А., Ладынин И.Г., Ястребов В.В. Концепция виртуальных датчиков в
задачах управления мобильными мехатронными системами. // Труды 3-ей
Международной научно-технической конференции "Современные методы и
средства океанологических исследований", М., 1997, с. 137-143.
18. Кирильченко А.А.,
Петрин А.А. Концепция виртуальной сенсорной сети как основа информационного
обеспечения систем контроля и мобильных роботов. //"Науч.-техн. конф.
профессорско-преподавательского, научного и инженерно-технического состава",
М.: МТУСИ, 2002, 97-98.
19.
Rowland J.J,
Nicholls H.R., A virtual sensor implementation for a assembly machine. // Robotica,
1995, Vol. 13, pp. 195-199.
20. Navigation of mobile robots: open questions. M.A.
Salichs, L. Moreno. Robotica (2000) v.18, pp. 227-234. Cambridge University Press.
РИСУНКИ
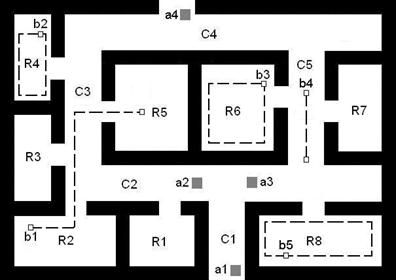
Рис.
1. Пример террайна R1…R8 – комнаты; С1…С5 – коридоры; а1…а4 – элементы РМС; b1…b5 – неизвестные
объекты. Пунктиром показаны возможные перемещения неизвестных объектов
Рис. 2. Принципиальная схема
функционирования используемых виртуальных датчиков
|
Сдвинуть предыдущее описание
отрезков на
|
|
Провести логическую фильтрацию
массива на “твёрдые” отрезки и скачки |
|
Фильтрация каждой точки отрезка
на попадание в e-полосу отрезков, полученных на предыдущих сеансах |
|
Восстановление отрезков, точки
которых не были отфильтрованы на предыдущем шаге и находятся на движущемся
объекте. |
Рис. 3. Блок-схема
виртуального датчика движущихся объектов.
![]()
![]()
![]()
Алгоритм движения
МР Выбор цели движения Выбор окончания
движения
Рис. 4.
Иерархия информационно-двигательного поведения РМС при решении задачи
информационного мониторинга подвижных объектов мобильными роботами.
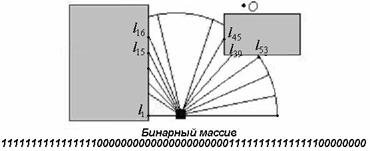
Рис.5. Пример формирования
локальной карты местности
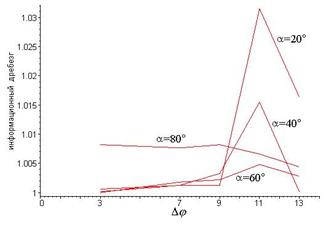
Рис. 6.
Зависимость информационного дребезга от дискретности поворота для случая
расположения МР на расстояниии 1 корпуса от стены
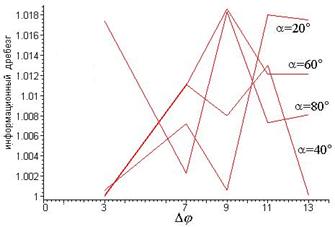
Рис.7.
Зависимость информационного дребезга от дискретности поворота для случая
расположения МР на расстояниии 2 корпусов от стены

Рис. 8.
Зависимость информационного дребезга от дискретности поворота для случая
расположения МР на расстояниии 3 корпусов от стены
|
а |
б |
||
|
Рис. 9. Варианты прохода в дверь |
|||
|
|
|
|
|
а. |
б. |
|
|
Рис. 10. Косвенная встреча двух МР |
||
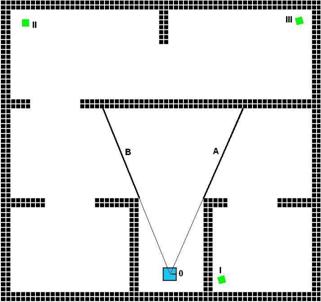
Рис. 11. Этап №1 решения
задачи информационного мониторинга подвижных объектов мобильными роботами
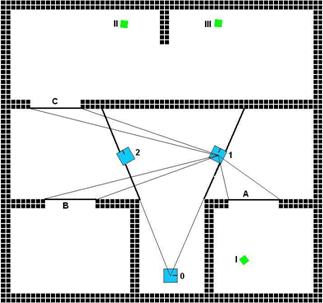
Рис. 12. Этап №2 решения
задачи информационного мониторинга подвижных объектов мобильными роботами
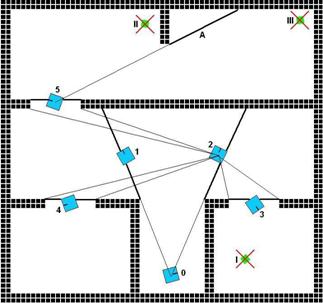
Рис. 13. Этап №3 решения
задачи информационного мониторинга подвижных объектов мобильными роботами
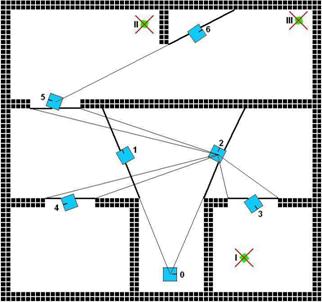
Рис. 14. Этап №4 решения
задачи информационного мониторинга подвижных объектов мобильными роботами