Анализ вращательного движения первого российского наноспутника ТНС-0 по результатам летных
испытаний
|

 ,
,
|
|
|
|
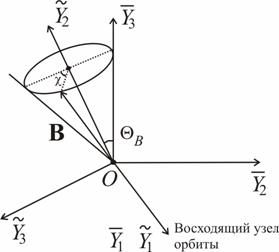
Рис.4. Углы, задающие направ-ление кинетического
момента относительно инерциальной сис-темы координат |
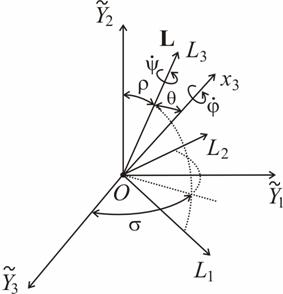
Рис.5. Углы, задающие ориен-тацию тела
относительно системы координат, связанной с направ-лением кинетического
момента |

Запишем
уравнения возмущенного движения осесимметричного спутника в виде
 (2)
(2)
где ![]() ‑ главные моменты
инерции спутника (
‑ главные моменты
инерции спутника (![]() ),
), ![]() ‑ компоненты
вектора механического момента, действующего на спутник, в системе координат
‑ компоненты
вектора механического момента, действующего на спутник, в системе координат ![]() . Вектор механического момента в системе
. Вектор механического момента в системе ![]() выражается через его
проекции
выражается через его
проекции ![]() на оси системы
координат
на оси системы
координат ![]() по формулам
по формулам

Введем безразмерный
кинетический момент ![]() по формуле
по формуле ![]() и безразмерное время
и безразмерное время ![]() , где
, где  ,
, ![]() ‑ угловая
скорость обращения спутника по орбите,
‑ угловая
скорость обращения спутника по орбите, ![]() ‑ величина
кинетического момента при
‑ величина
кинетического момента при ![]() . В этом случае
. В этом случае ![]() . Введем безразмерную индукцию магнитного поля Земли
. Введем безразмерную индукцию магнитного поля Земли ![]() и безразмерный
дипольный момент
и безразмерный
дипольный момент ![]() по формулам
по формулам ![]() ,
, ![]() ‑ модуль индукции геомагнитного поля (при
использовании осредненной модели эта величина постоянная). Дипольный момент
спутника в связанной системе координат записывается так
‑ модуль индукции геомагнитного поля (при
использовании осредненной модели эта величина постоянная). Дипольный момент
спутника в связанной системе координат записывается так ![]() , где
, где ![]() ‑ дипольный момент постоянного магнита. При этом
получим также безразмерный механический момент
‑ дипольный момент постоянного магнита. При этом
получим также безразмерный механический момент ![]() , действующий на спутник,
, действующий на спутник, ![]() . Уравнения динамики спутника в безразмерных переменных
запишутся в виде
. Уравнения динамики спутника в безразмерных переменных
запишутся в виде
 (3)
(3)
где ![]() ,
, ![]() суть безразмерные параметры,
суть безразмерные параметры,

 .
.
7.
Обработка кратковременных измерений
при быстром вращении спутника
Как уже было отмечено ранее, сначала измерения, получаемые со спутника,
производились за время порядка нескольких минут. В настоящем разделе опишем
обработку таких измерений.
Обработка включала в себя
предварительный логический анализ измерения, далее составление простой модели
движения и последующие определение параметров этой простой модели путем
сопоставления реальных и моделируемых измерений. Каждый кратковременный сеанс
измерений анализировался отдельно. Однако на всех измерениях видно нечто общее ‑
это то, что спутник довольно быстро вращается. Определяя период изменения
сигнала на измерениях, можно сделать вывод о скорости вращения спутника.
Спутник ТНС-0 имеет форму цилиндра и в
дальнейшем будем считать, что он обладает осевой динамической симметрией (![]() ). Динамику спутника будем описывать с помощью уравнений в
переменных Белецкого-Черноусько (2). Вследствие того, что спутник быстро
вращается, безразмерный параметр
). Динамику спутника будем описывать с помощью уравнений в
переменных Белецкого-Черноусько (2). Вследствие того, что спутник быстро
вращается, безразмерный параметр ![]() можно считать малым.
Поскольку мы рассматриваем движение спутника на достаточно коротком интервале
времени, то положим переменные
можно считать малым.
Поскольку мы рассматриваем движение спутника на достаточно коротком интервале
времени, то положим переменные ![]() ,
, ![]()
![]() ,
, ![]() постоянными, так как
их производные пропорциональны
постоянными, так как
их производные пропорциональны ![]() . В выражениях производных для переменных
. В выражениях производных для переменных ![]() ,
, ![]() также сохраним только
немалые члены. Фактически ‑ это предположение о том, что в движении
спутника реализуется случай Эйлера вращения твердого тела. Уравнения движения
будут выглядеть так:
также сохраним только
немалые члены. Фактически ‑ это предположение о том, что в движении
спутника реализуется случай Эйлера вращения твердого тела. Уравнения движения
будут выглядеть так:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
(4)
,
(4)
 ,
, ![]() .
.
Уравнения (4) легко интегрируются
![]() ,
, ![]() ,
, ![]() ,
, ![]() , (5)
, (5)
 ,
, ![]() .
.
Для того чтобы проще было совмещать реальные и
моделируемые измерения солнечных датчиков, удобно ввести еще один
дополнительный параметр интегрирования – момент начала измерения ![]() . В этом случае решения для переменных
. В этом случае решения для переменных ![]() ,
, ![]() будут выглядеть так:
будут выглядеть так:
 ,
, ![]() .
.
При принятых допущениях получаем, что система ![]() является инерциальной
системой координат (см. рис.4 и рис.5), а следовательно, в дальнейшем нет
необходимости рассматривать систему
является инерциальной
системой координат (см. рис.4 и рис.5), а следовательно, в дальнейшем нет
необходимости рассматривать систему ![]() . Поскольку теперь имеется некий произвол в задании системы
координат
. Поскольку теперь имеется некий произвол в задании системы
координат ![]() , то определим ее следующим образом: начало поместим в центр масс
спутника; ось
, то определим ее следующим образом: начало поместим в центр масс
спутника; ось ![]() как и раньше совпадает
с вектором кинетического момента спутника; ось
как и раньше совпадает
с вектором кинетического момента спутника; ось ![]() определим так, чтобы направление на Солнце
лежало в плоскости
определим так, чтобы направление на Солнце
лежало в плоскости ![]() ; ось
; ось ![]() дополняет систему
координат до правой ортогональной.
дополняет систему
координат до правой ортогональной.
Направление на Солнце в системе ![]() будем задавать углом
будем задавать углом ![]() , а направления на Землю двумя углами –
, а направления на Землю двумя углами – ![]() и
и ![]() (рис. 6.). По причине
небольшой продолжительности каждого сеанса измерений также будем считать, что
направления на Солнце и Землю остаются постоянными в течение одного сеанса.
(рис. 6.). По причине
небольшой продолжительности каждого сеанса измерений также будем считать, что
направления на Солнце и Землю остаются постоянными в течение одного сеанса.
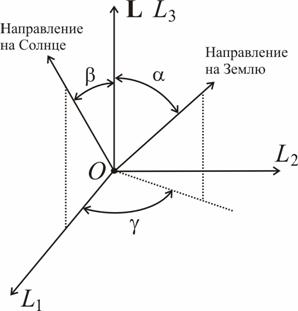
Рис.6. Направление на Солнце и на Землю в системе
координат ![]()
Таким образом, для того чтобы
моделировать измерения солнечных датчиков за время одного сеанса, необходимо
знать следующий набор постоянных величин: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() при отсутствии альбедо
Земли и
при отсутствии альбедо
Земли и ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() при наличии альбедо
Земли. Здесь
при наличии альбедо
Земли. Здесь ![]() ‑ коэффициент,
указывающий во сколько раз альбедо Земли меньше излучения от Солнца. Поскольку
альбедо Земли зависит от положения спутника на орбите, то этот коэффициент
может быть различным для разных сеансов измерений.
‑ коэффициент,
указывающий во сколько раз альбедо Земли меньше излучения от Солнца. Поскольку
альбедо Земли зависит от положения спутника на орбите, то этот коэффициент
может быть различным для разных сеансов измерений.
Задавая определенным образом набор
постоянных величин, можно моделировать измерения солнечных датчиков. Реальные и
моделируемые измерения можно сравнить, и вычислить их среднеквадратичное
отклонение. Если набор постоянных величин неизвестен, то для их определения
следует, рассматривая среднеквадратичное отклонение как функцию этих
параметров, найти его минимум. Точка минимума среднеквадратичного отклонения
укажет искомые значения неизвестных параметров. Именно таким образом в
настоящей работе производилось определение параметров движения на основании
измерений солнечных датчиков.
Поскольку среднеквадратичное отклонение
имеет множество локальных минимумов, найти глобальный минимум методом
градиентного спуска не представляется возможным. Для нахождения минимума в
данном случае строилась сетка значений по каждой переменной, в пределах ее
изменения. Для углов ![]() ,
, ![]() ,
, ![]() , пределы изменения
, пределы изменения ![]() ,
, ![]() ,
, ![]() соответственно. Предел
изменения величины кинетического момента определяется следующим образом. По
двум ближайшим пикам измерений в одном сеансе определялось максимально возможное
значение кинетического момента (по одному из датчиков):
соответственно. Предел
изменения величины кинетического момента определяется следующим образом. По
двум ближайшим пикам измерений в одном сеансе определялось максимально возможное
значение кинетического момента (по одному из датчиков): ![]() , где
, где ![]() – максимальный из
главных центральных моментов инерции,
– максимальный из
главных центральных моментов инерции, ![]() – время между
ближайшими пиками. После этого методом полного перебора по узлам сетки
отыскивался минимум. Далее выбиралась некоторая окрестность точки минимума. В
этой окрестности также строилась уже более мелкая сетка, и отыскивался минимум.
Описанная последовательность действий повторялась до достижения заданной точности
определения параметров. В некоторых случаях оказывалось возможным сначала
построить сетку и произвести минимизацию по одним параметрам, а потом по другим
поочередно. Это заметно упрощало вычисления.
– время между
ближайшими пиками. После этого методом полного перебора по узлам сетки
отыскивался минимум. Далее выбиралась некоторая окрестность точки минимума. В
этой окрестности также строилась уже более мелкая сетка, и отыскивался минимум.
Описанная последовательность действий повторялась до достижения заданной точности
определения параметров. В некоторых случаях оказывалось возможным сначала
построить сетку и произвести минимизацию по одним параметрам, а потом по другим
поочередно. Это заметно упрощало вычисления.
В таблице 1 приводятся результаты
определения постоянных величин; время измеряется в секундах, углы в радианах,
кинетический момент в [кг м2/с].
На рис.7-13 приводятся результаты обработки данных для разных сеансов
измерений. На графиках изображены расчетные и измеренные зависимости косинусов
углов между направлением на Солнце и плоскостью
соответствующих солнечных датчиков. Далее опишем особенности каждой
серии измерений. На рис.14 показано изменение величины кинетического момента за
время проводившихся измерений. Здесь время измеряется в часах, ноль соответствует
первому сеансу измерений.
Таблица 1. Найденные значения
постоянных величин из (5) для каждого сеанса измерений
|
|
[кг м2/с] |
|
|
|
|
|
|
|
|
|
1 |
0.0936 |
1.086 |
5.952 |
|
20.36 |
0.80 |
- |
- |
- |
|
2 |
0.0644 |
1.571 |
3.968 |
3.968 |
0 |
0.99 |
1.819 |
2.417 |
0.6 |
|
3 |
0.0562 |
1.571 |
3.942 |
4.028 |
2.143 |
0.80 |
1.984 |
2.094 |
0.16 |
|
4 |
0.0535 |
1.571 |
1.396 |
0.9 |
0 |
3.14 |
0.33 |
1.77 |
0.7 |
|
5 |
0.0517 |
1.571 |
0.698 |
4.188 |
0 |
0.524 |
2.14 |
0.16 |
0.2 |
|
6 |
0.0431 |
1.571 |
1.653 |
0.992 |
0 |
1.772 |
1.32 |
4.188 |
0.2 |
|
7 |
0.017 |
1.571 |
5.925 |
3.968 |
0 |
2.314 |
1.984 |
2.416 |
0.6 |
Данные
от 05-03-28, 09:42 (рис.7)
Это первый сеанс измерений. Видно, что
спутник вращается с довольно большой скоростью. На измерениях отсутствуют
локальные максимумы, которые не достигали бы значений близких к максимальным.
Из этого факта можно сделать вывод, что на этих измерениях, скорее всего,
отсутствует альбедо Земли. Поэтому для обработки этих измерений использовался
соответствующий набор определяемых величин.
Данные
от 05-04-06, 14:05 (рис.8)
На этих данных отчетливо видны пики
локальных максимумов, которые не достигают значений близких к максимальным. Это
говорит о присутствии на измерениях альбедо Земли. Для обработки измерений
использовался набор определяемых величин, содержащий углы направления на Землю.
Необходимо отметить, что в силу
расположения датчики ДС1 и ДС3 не могут одновременно засвечиваться одним
источником. То есть при наличии ненулевых данных с этих двух датчиков в одно и
то же время можно говорить, что один из них засвечивается Солнцем, другой –
Землей. По значению измеряемых величин определялось какой именно датчик
засвечивается тем или иным источником. То, что в показаниях датчика ДС1 за все
время измерений не разу не появилось Солнце, говорит об отсутствии собственного
вращения спутника. При движении твердого тела в случае Эйлера его собственное
вращение может отсутствовать только, если угол нутации ![]() равен
равен ![]() . Таким образом найдена одна из определяемых величин.
. Таким образом найдена одна из определяемых величин.
Для того чтобы легче определить
параметры, сначала из исходных измерений «удалялись» локальные максимумы,
полученные от альбедо Земли. В местах, где располагались эти минимумы, значения
сигнала полагались равными нулю. Это позволило сначала определить некоторые
величины, не зависящие от альбедо, а потом, не изменяя уже найденные величины,
определить оставшиеся.
Данные от
05-04-08, 04:03 (рис.9)
Обработка этих измерений аналогично
обработке измерений
от 05-04-06, 14:05.
Данные от
05-04-09, 03:04 (рис.10)
На этих измерениях датчики ДС2 и ДС3
полностью засвечены Солнцем. Датчик ДС1 видит альбедо Земли. Аналогично
обработке измерений от 05-04-06, 14:05 из измерений исключались сигналы от
альбедо Земли, то есть показания ДС1 полагались нулевыми. Сначала определялись
некоторые величины, не зависящие от альбедо, а потом, не изменяя уже найденные
величины, определялись оставшиеся.
Данные
от 05-04-09, 15:07 (рис.11); от 05-04-11, 21:09 (рис.12);
от 05-04-19, 04:01 (рис.13)
Обработка этих измерений аналогично обработке
измерений от 05-04-06, 14:05.

Рис.7. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-03-28, 09:42
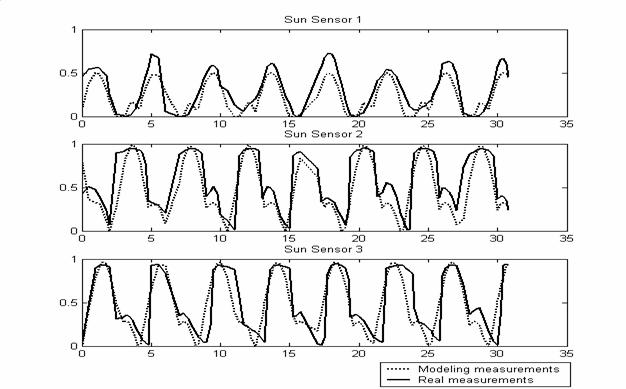
Рис.8. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-04-06, 14:05

Рис.9. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-04-08, 04:03

Рис.10. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-04-09, 03:04
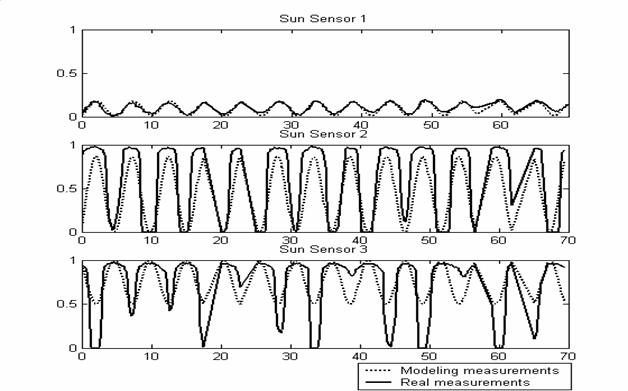
Рис.11. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-04-09, 15:07

Рис.12. Зависимость косинуса угла
между нормалью к плоскости датчика и направлением на Солнце для датчиков 1, 2, 3 соответственно. Данные от
05-04-11, 21:09
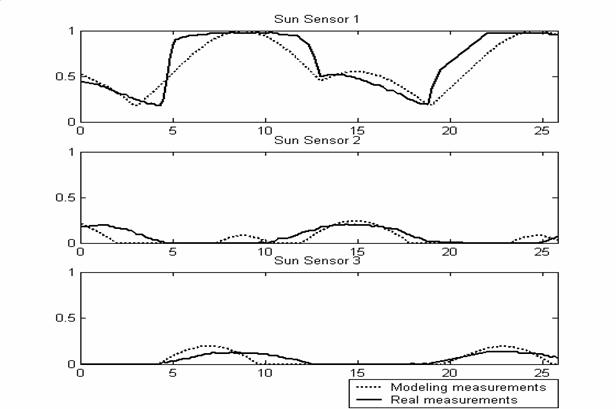
Рис.13.
Зависимость косинуса угла между нормалью к плоскости датчика и направлением на
Солнце для датчиков 1, 2, 3
соответственно. Данные от 05-04-19, 04:01
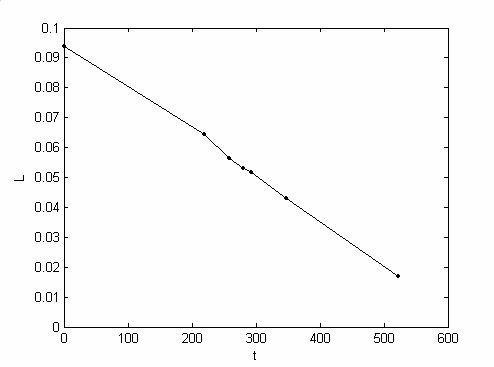
Рис.14. Изменение величины
кинетического момента спутника ТНС-0
от времени (кинетический момент измеряется в [кг м2/с], время в [ч])
8. Движение
быстро вращающегося спутника
с постоянным магнитом
Как для обработки кратковременных
измерений, так и для обработки измерений, сделанных в течение одного витка,
необходима простая модели движения спутника. В случае кратковременных измерений
в качестве такой моделью было выбрано эйлерово вращение твердого тела. В
настоящем разделе будет получена модель для обработки длительных измерений.
Спутник считается осесимметричным твердым телом. По оси симметрии спутника расположен сильный постоянный магнит. В экваториальной плоскости магнита расположены гистерезисные стержни по двум взаимно ортогональным направлениям.
Будем использовать осредненную модель
геомагнитного поля, описанную в разделе 5. Вектор индукции геомагнитного поля
удобно записывается в системе координат ![]() . В ней безразмерный вектор магнитной индукции выглядит
согласно (1). Именно в этой системе координат будут записаны уравнения динамики
спутника в переменных Белецкого-Черноусько. Для начала рассмотрим движение
спутника только с постоянным магнитом.
. В ней безразмерный вектор магнитной индукции выглядит
согласно (1). Именно в этой системе координат будут записаны уравнения динамики
спутника в переменных Белецкого-Черноусько. Для начала рассмотрим движение
спутника только с постоянным магнитом.
Безразмерный механический момент от
постоянного магнита в системе координат ![]() запишется так:
запишется так:

Здесь

В безразмерных уравнениях
переменные, описывающие вращение спутника, можно разделить на быстрые и
медленные. Быстрыми переменными являются углы ![]() и
и ![]() . Медленными переменными ‑ безразмерный кинетический
момент
. Медленными переменными ‑ безразмерный кинетический
момент ![]() и углы
и углы ![]() ,
, ![]() ,
, ![]() . Далее произведем осреднение уравнений для медленных
переменных по быстрым переменным [10]. Заметим, что при интересующем нас
режиме,
. Далее произведем осреднение уравнений для медленных
переменных по быстрым переменным [10]. Заметим, что при интересующем нас
режиме, ![]() , на орбите спутника ТНС-0
, на орбите спутника ТНС-0 ![]() , и следовательно,
, и следовательно, ![]() , то есть величина
, то есть величина ![]() ограничена, что
необходимо при проведении осреднения по переменной
ограничена, что
необходимо при проведении осреднения по переменной ![]() . Осредненные по быстрым переменным уравнения движения
принимают вид
. Осредненные по быстрым переменным уравнения движения
принимают вид
 (6)
(6)
где ![]() ‑ угол
отклонения кинетического момента спутника от магнитного поля в плоскости
‑ угол
отклонения кинетического момента спутника от магнитного поля в плоскости ![]() ,
, ![]() и
и ![]() ‑ коэффициенты,
определяемые по формулам
‑ коэффициенты,
определяемые по формулам
 . (7)
. (7)
В частности, система уравнений
(6) исследована в работе [11], где она получена для другого случая. Такая
система допускает интеграл движения
![]() ,
,
который используется в [11] для
построения функций Ляпунова при доказательстве устойчивости решений.
Уравнения (6) имеют две стационарные точки. Первая
стационарная точка ![]() соответствует тому,
что кинетический момент отслеживает вектор магнитной индукции
соответствует тому,
что кинетический момент отслеживает вектор магнитной индукции ![]() . Вторая стационарная точка
. Вторая стационарная точка ![]()
![]() соответствует тому,
что кинетический момент отслеживает вектор
соответствует тому,
что кинетический момент отслеживает вектор ![]() .
.
Обе стационарные точки являются устойчивыми, но не
асимптотически, так как в системе отсутствует демпфирование. В качестве примера
докажем устойчивость для первой стационарной точки. Построим функцию
![]() .
.
Как легко видеть ![]() . Докажем, что эта функция положительно определенная в
окрестности
. Докажем, что эта функция положительно определенная в
окрестности ![]() ,
, ![]() . В самой этой точке функция принимает нулевое значение.
Получим производные этой функции
. В самой этой точке функция принимает нулевое значение.
Получим производные этой функции
![]()
![]() .
.
В самой же стационарной точке ![]() . Далее рассмотрим вторые производные этой функции
. Далее рассмотрим вторые производные этой функции ![]()
![]() ,
, ![]() ,
, ![]()
В самой стационарной точке
![]() ,
,  .
.
Откуда согласно критерию
Сильвестра получаем, что в стационарной точке функция ![]() имеет строгий
локальный минимум с нулевым значением. Следовательно, эту функцию можно
использовать как функцию Ляпунова. Существование такой функции доказывает
устойчивость стационарной точки.
имеет строгий
локальный минимум с нулевым значением. Следовательно, эту функцию можно
использовать как функцию Ляпунова. Существование такой функции доказывает
устойчивость стационарной точки.
Для второй стационарной
точки ![]()
![]() доказательство
устойчивости проводится аналогично. В качестве функции Ляпунова используется
функция
доказательство
устойчивости проводится аналогично. В качестве функции Ляпунова используется
функция
![]() .
.
Поскольку угол ![]() в данном случае может
быть любым, то осредненный по прецессионному вращению дипольный момент спутника
устойчиво может отслеживать как вектор
в данном случае может
быть любым, то осредненный по прецессионному вращению дипольный момент спутника
устойчиво может отслеживать как вектор ![]() , так и вектор
, так и вектор ![]() . Заметим, что это отслеживание не точное. Существует
отличный от нуля угол между кинетическим моментом спутника и вектором
. Заметим, что это отслеживание не точное. Существует
отличный от нуля угол между кинетическим моментом спутника и вектором ![]() (или
(или ![]() ). Чем медленней скорость изменения магнитного поля, тем
меньше этот угол. Если же считать магнитное поле постоянным, то в стационарных
точках кинетический момент выставлен точно по вектору магнитной индукции
). Чем медленней скорость изменения магнитного поля, тем
меньше этот угол. Если же считать магнитное поле постоянным, то в стационарных
точках кинетический момент выставлен точно по вектору магнитной индукции ![]() или противоположен
ему.
или противоположен
ему.
9. Асимптотическая устойчивость вращающегося спутника
с постоянным магнитом и гистерезисными стержнями
Далее, чтобы получить
асимптотическую устойчивость стационарных точек, введем в систему гистерезисное
демпфирование. Для простоты рассмотрим систему в постоянном магнитном поле.
Следует сказать несколько слов об
используемой в работе модели гистерезиса. Пусть дипольный момент спутника от
гистерезисных стержней определяется выражением
![]() ,
,
где ![]() ‑ проекция
индукции магнитного поля на экваториальную плоскость спутника с запаздыванием
на время Dt . Предполагая, что запаздывание Dt мало, а дипольный момент постоянного магнита намного сильнее
наведенного момента от гистерезисных стержней, получаем действующий на спутник
механический момент в связанной системе координат
‑ проекция
индукции магнитного поля на экваториальную плоскость спутника с запаздыванием
на время Dt . Предполагая, что запаздывание Dt мало, а дипольный момент постоянного магнита намного сильнее
наведенного момента от гистерезисных стержней, получаем действующий на спутник
механический момент в связанной системе координат
![]() . (8)
. (8)
Здесь первое слагаемое отвечает моменту от постоянного
магнита, а второе слагаемое ‑ гистерезисному демпфированию. Поскольку
необходимо получить механический момент в ![]() то для этого следует
использовать соотношение
то для этого следует
использовать соотношение
![]() ,
(9)
,
(9)
где ![]() ‑ производная
индукции магнитного поля в
‑ производная
индукции магнитного поля в ![]() ,
, ![]() ‑ производная
индукции магнитного поля относительно связанной системы координат, но заданная
при этом в проекциях на оси
‑ производная
индукции магнитного поля относительно связанной системы координат, но заданная
при этом в проекциях на оси ![]() ,
, ![]() ‑ угловая
скорость связанной системы координат относительно
‑ угловая
скорость связанной системы координат относительно ![]() в проекциях на оси
этой же системы координат. Учитывая соотношение (9), получаем механический
момент от гистерезисных стержней в системе координат
в проекциях на оси
этой же системы координат. Учитывая соотношение (9), получаем механический
момент от гистерезисных стержней в системе координат ![]() в виде
в виде
![]() .
.
Выражение для проекции магнитного поля на экваториальную плоскость
можно получить по формуле
![]() ,
,
где ![]() ‑ вектор,
направленный по оси симметрии спутника, который в системе координат
‑ вектор,
направленный по оси симметрии спутника, который в системе координат ![]() записывается так:
записывается так:
![]() .
.
Угловую скорость связанной системы координат
относительно ![]() в проекциях на оси
этой же системы координат приближенно запишем в виде
в проекциях на оси
этой же системы координат приближенно запишем в виде
![]() . (10)
. (10)
Формула (10) учитывает только члены нулевого и первого
порядка по ![]() для двух случаев,
которые будут рассмотрены ниже. В случае произвольного движения выражение для
угловой скорости
для двух случаев,
которые будут рассмотрены ниже. В случае произвольного движения выражение для
угловой скорости ![]() будет сложнее, чем (10).
будет сложнее, чем (10).
Исследуем на асимптотическую
устойчивость стационарные точки при неизменном магнитном поле. При этом
считаем, что в стационарных точках кинетический момент выставлен по B, или –B.
Пусть вектор кинетического момента
коллинеарен вектору B. В этом
случае момент от постоянного магнита будет отсутствовать, а момент, создаваемый
гистерезисными стержнями, будет влиять только на изменение угла ![]() . Рассмотрим динамику угла q при фиксированном направлении вектора кинетического
момента.
. Рассмотрим динамику угла q при фиксированном направлении вектора кинетического
момента.
Пусть вектор кинетического момента
сонаправлен вектору индукции магнитного поля. Тогда дифференциальное уравнение
для угла ![]() будет выглядеть
следующим образом:
будет выглядеть
следующим образом:
 . (11)
. (11)
Асимптотически устойчивая стационарная точка уравнения
(11) будет  . Асимптотическую устойчивость этой стационарной точки легко
получить, если ввести переменную
. Асимптотическую устойчивость этой стационарной точки легко
получить, если ввести переменную ![]() и рассмотреть функцию
и рассмотреть функцию ![]() . Функция
. Функция ![]() удовлетворяет
требованиям, накладываемым на функцию Ляпунова. Она положительно определенная и
в окрестности нуля
удовлетворяет
требованиям, накладываемым на функцию Ляпунова. Она положительно определенная и
в окрестности нуля ![]() , что является достаточным условием для асимптотической устойчивости.
, что является достаточным условием для асимптотической устойчивости.
Далее, пусть вектор кинетического
момента направлен противоположно вектору индукции магнитного поля. Тогда
дифференциальное уравнение для угла ![]() имеет вид
имеет вид
 . (12)
. (12)
Асимптотически устойчивая
стационарная точка:  .
.
Полученные стационарные точки говорят о том, что в
случае гистерезисного демпфирования существует только одно значение угла ![]() , при котором возможно стационарное вращение. Осредненный по
прецессионному вращению дипольный момент спутника теперь может отслеживать
только вектор
, при котором возможно стационарное вращение. Осредненный по
прецессионному вращению дипольный момент спутника теперь может отслеживать
только вектор ![]() , а не вектор
, а не вектор ![]() , как это было ранее. Из уравнений динамики спутника видно,
что при стационарном значении угла нутации отсутствуют собственные вращения
спутника. В работах [13,14] такое движение названо резонансом
, как это было ранее. Из уравнений динамики спутника видно,
что при стационарном значении угла нутации отсутствуют собственные вращения
спутника. В работах [13,14] такое движение названо резонансом ![]() . Это название указывает на отсутствие у твердого тела
собственного вращения вокруг оси симметрии.
. Это название указывает на отсутствие у твердого тела
собственного вращения вокруг оси симметрии.
Рассмотрим динамику углов ![]() и
и ![]() , определяющих направление кинетического момента. Исследуем
устойчивость положения кинетического момента вдоль магнитного поля. Для
доказательства устойчивости этого положения будем использовать в качестве
функции Ляпунова следующую функцию:
, определяющих направление кинетического момента. Исследуем
устойчивость положения кинетического момента вдоль магнитного поля. Для
доказательства устойчивости этого положения будем использовать в качестве
функции Ляпунова следующую функцию:
![]() .
.
Аналогично приведенному ранее рассуждению можно
получить, что эта функция в точке ![]() ,
, ![]() имеет строгий
локальный минимум, значение в котором равно нулю. Вычислим полную производную
функции
имеет строгий
локальный минимум, значение в котором равно нулю. Вычислим полную производную
функции ![]() с учетом уравнений
движения
с учетом уравнений
движения
 (13)
(13)
Проанализируем зависимость от
переменных ![]() и
и ![]() первого сомножителя в
выражении (13), которое далее обозначим
первого сомножителя в
выражении (13), которое далее обозначим ![]() . В стационарной точке значение этого сомножителя равно нулю
. В стационарной точке значение этого сомножителя равно нулю ![]() . Первые производные этой функции в стационарной точке также
равны нулю
. Первые производные этой функции в стационарной точке также
равны нулю ![]() . Далее получим вторые производные этой функции
. Далее получим вторые производные этой функции ![]() в стационарной точке
в стационарной точке ![]() ,
, ![]() ,
, ![]() . Определи знаки миноров у матрицы вторых производных
. Определи знаки миноров у матрицы вторых производных
![]() ,
,  .
.
Следовательно, согласно
критерию Сильвестра получаем, что в стационарной точке функция ![]() имеет строгий
локальный минимум с нулевым значением. Для отрицательно определенной исходной
функции
имеет строгий
локальный минимум с нулевым значением. Для отрицательно определенной исходной
функции ![]() в окрестности
стационарной точки достаточно, чтобы второе слагаемое было положительно
в окрестности
стационарной точки достаточно, чтобы второе слагаемое было положительно
![]() . (14)
. (14)
Подставим выражения для ![]() и
и ![]() из системы (3),
удержав в них выражения нулевого и первого порядка малости по параметру
из системы (3),
удержав в них выражения нулевого и первого порядка малости по параметру ![]() . Будем предполагать, что угол
. Будем предполагать, что угол ![]() находится вблизи
стационарной точки, а следовательно,
находится вблизи
стационарной точки, а следовательно, ![]() имеет порядок
имеет порядок ![]() . Пренебрежем также членами
. Пренебрежем также членами ![]() , что справедливо, если влияние гистерезисных стержней мало
по сравнению с влиянием постоянного магнита, то есть, если
, что справедливо, если влияние гистерезисных стержней мало
по сравнению с влиянием постоянного магнита, то есть, если ![]() мало. В результате
получим неравенство
мало. В результате
получим неравенство
 (15)
(15)
Поскольку нас интересует это
неравенство только в окрестности стационарной точки ![]() ,
, ![]() , то можно выбрать такую окрестность, где будут выполняться
условия
, то можно выбрать такую окрестность, где будут выполняться
условия

Здесь ![]() сколь угодно малое
положительное число. Если переменные
сколь угодно малое
положительное число. Если переменные ![]() ,
, ![]() принадлежат такой
окрестности, то в этом случае можно записать усиленное неравенство для угла
принадлежат такой
окрестности, то в этом случае можно записать усиленное неравенство для угла ![]()
![]() (16)
(16)
Устремляя ![]() к нулю, получаем
неравенство
к нулю, получаем
неравенство
![]() .
(17)
.
(17)
Выполнения неравенства (16)
достаточно для того, чтобы полная производная функции ![]() была отрицательно
определенной в окрестности рассматриваемой стационарной точки. Здесь мы не
будем искать все его решения. Укажем только, что если
была отрицательно
определенной в окрестности рассматриваемой стационарной точки. Здесь мы не
будем искать все его решения. Укажем только, что если ![]() стремиться к
стремиться к ![]() , то неравенство выполняется.
, то неравенство выполняется.
Подставляя выражение для стационарной
точки ![]() уравнений (5) в
неравенство (17), получаем условие на величину безразмерного кинетического
момента
уравнений (5) в
неравенство (17), получаем условие на величину безразмерного кинетического
момента ![]()
 . (18)
. (18)
Это неравенство может не
выполняться только, если ![]() и величина
безразмерного кинетического момента
и величина
безразмерного кинетического момента ![]() мала. Но случай малого
мала. Но случай малого
![]() здесь не
рассматривается, поскольку в этом случае переменная
здесь не
рассматривается, поскольку в этом случае переменная ![]() не является быстрой
переменной, и проводить по ней осреднение уравнений движения нельзя. Таким
образом, при устойчивом значении угла
не является быстрой
переменной, и проводить по ней осреднение уравнений движения нельзя. Таким
образом, при устойчивом значении угла ![]() , ориентация кинетического момента спутника также
асимптотически устойчива.
, ориентация кинетического момента спутника также
асимптотически устойчива.
В итоге мы получили, что
функцию ![]() удовлетворяет всем
требованиям, предъявляемым к функции Ляпунова. Существование такой функции и
выполнение условия
удовлетворяет всем
требованиям, предъявляемым к функции Ляпунова. Существование такой функции и
выполнение условия ![]() в выколотой
окрестности стационарной точки доказывает асимптотическую устойчивость этой
стационарной точки.
в выколотой
окрестности стационарной точки доказывает асимптотическую устойчивость этой
стационарной точки.
Для доказательства асимптотической
устойчивости стационарной точки ![]() ,
, ![]() используется в
качестве функций Ляпунова функция:
используется в
качестве функций Ляпунова функция:
![]() .
.
Эта функция является
положительно определенной в окрестности ![]() ,
, ![]() . Ее полная производная будет отрицательно определенной при
выполнении того же неравенства (17) на угол
. Ее полная производная будет отрицательно определенной при
выполнении того же неравенства (17) на угол ![]() . Проверяя выполнение неравенства (17) для стационарной точки
. Проверяя выполнение неравенства (17) для стационарной точки
![]() уравнения (12),
получаем, что в реализуемой ситуации оно выполнено. Следовательно, такое
направление кинетического момента также асимптотически устойчиво.
уравнения (12),
получаем, что в реализуемой ситуации оно выполнено. Следовательно, такое
направление кинетического момента также асимптотически устойчиво.
Анализ уравнений показывает, что при таком режиме
отсутствует уменьшение кинетического момента, даже при наличии на спутнике
гистерезисных стержней, Это происходит из-за того, что в таком режиме вращения
спутника не происходит перемагничивание гистерезисных стержней. Наличие на
спутнике гистерезисных стержней делает этот режим асимптотически устойчивым.
10. Определение параметров движения спутника по измерениям,
проведенным в течение одного витка
Режим, описанный в предыдущих разделах, при котором
вектор кинетического момента отслеживает вектор индукции геомагнитного поля,
был взят в качестве модели движения спутника. То, что спутник вышел на такой
режим, можно понять по косвенным признакам путем анализа измерений (см.
рис.15). По этим измерениям видно, что отсутствует собственное вращение
спутника, ибо если это вращение присутствовало, то сигнал с датчика ДС3
повторял бы измерения с датчиков ДС1 и ДС2 с некоторым запаздыванием. Далее
видно, что спутник не просто вращается как в случае Эйлера, а параметры его
вращения как-то эволюционируют при движении спутника по орбите. В отсутствии
такой эволюции на показаниях датчиков ДС1 и ДС2 не было бы изменения периодического
режима их засветки от Солнца. Кроме того, нельзя сказать, что магнит спутника
отслеживает вектор индукции геомагнитного поля, ибо если такое отслеживание
имело место, то спутник вращался бы с удвоенной орбитальной частотой. Из
измерений видно, что спутник вращается гораздо быстрее. Именно такое быстрое
вращение спутника с пассивной магнитной системой ориентации и было изучено выше
в разделах 8 и 9.
Описанный режим вращения спутника моделировался
следующим образом. При движении спутника по орбите ось ![]() системы координат
системы координат ![]() направлена по вектору
индукции магнитного поля. Ось
направлена по вектору
индукции магнитного поля. Ось ![]() в каждый момент
времени перпендикулярна оси
в каждый момент
времени перпендикулярна оси ![]() и оси
и оси ![]() системы координат
системы координат ![]() , которая связана с конусом, заметаемым вектором индукции
магнитного поля при движении спутника по орбите. Ось
, которая связана с конусом, заметаемым вектором индукции
магнитного поля при движении спутника по орбите. Ось ![]() дополняет систему
координат до правой ортогональной. Относительно системы координат
дополняет систему
координат до правой ортогональной. Относительно системы координат ![]() вращение спутника
задается с помощью углов Эйлера. Угол
вращение спутника
задается с помощью углов Эйлера. Угол ![]() меняется по закону
меняется по закону ![]() , а два другие угла
, а два другие угла ![]() и
и ![]() остаются постоянными.
Постоянство этих углов следует из рассмотренной модели движения спутника. В
результате получаем, что движение спутника определяется четырьмя константами
остаются постоянными.
Постоянство этих углов следует из рассмотренной модели движения спутника. В
результате получаем, что движение спутника определяется четырьмя константами ![]() ,
, ![]() ,
, ![]() ,
, ![]() , которые, как и в случае обработки кратковременных измерений
являлись определяемыми параметрами. В этом случае также моделировались
измерения солнечных датчиков и сравнивались с реальными измерениями. Для
моделирования положения Солнца относительно Земли использовались данные из
[15]. При моделировании измерений возникает еще один параметр
, которые, как и в случае обработки кратковременных измерений
являлись определяемыми параметрами. В этом случае также моделировались
измерения солнечных датчиков и сравнивались с реальными измерениями. Для
моделирования положения Солнца относительно Земли использовались данные из
[15]. При моделировании измерений возникает еще один параметр ![]() ‑ коэффициент,
указывающий во сколько раз альбедо Земли меньше излучения от Солнца.
‑ коэффициент,
указывающий во сколько раз альбедо Земли меньше излучения от Солнца.
В таблице 2 приводятся найденные значения постоянных
величин по измерениям, сделанным в течение одного витка. На рис.15.
представлены реальные измерения солнечных датчиков (сплошная линия) и модельные
измерения солнечных датчиков (пунктирная линии). На графиках время измеряется в
секундах. Из рисунка видно, что модельные измерения достаточно хорошо
соответствуют реальным.
Таблица 2. Найденные значения постоянных величин по
измерениям, сделанным в течение одного витка
|
|
|
|
|
|
|
7.2e-004 |
0.85 |
4 |
5.6 |
0.6 |
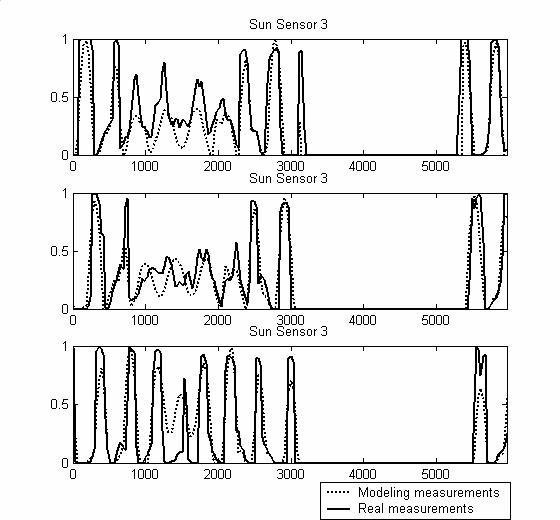
Рис.15. Данные от 02.06.05,
полученные за один виток, и результаты моделирования
Заключение
Анализ кратковременных измерений
показал, что скорость вращения спутника уменьшается в соответствие с тем
законом, как это и должно происходить на спутнике, оснащенном гистерезисными
стержнями.
На основании измерений за один виток
обращения спутника по орбите можно сделать заключение, что спутник, возможно,
вышел на следующий режим: при достаточно быстром вращении спутника осредненное по
периоду нутации направление магнита в среднем отслеживает вектор напряженности
геомагнитного поля. При этом угол между вектором индукции магнитного поля и
осью симметрии не мал и составляет примерно 45 градусов.
Было проведено аналитическое
исследование такого режима. Получено, что рассматриваемый режим является
устойчивым. Для исследования устойчивости применялся второй метод Ляпунова. При
совпадении направлений вектора магнитной индукции и вектора кинетического
момента, как это имеет место в данном режиме, отсутствует уменьшение величины
кинетического момента вследствие работы гистерезисных стержней. Это объясняет,
почему скорость вращения спутника не снизилась за довольно долгий промежуток
времени, в течение которого он «спал».
Благодарности
Работа выполнена
при частичной финансовой поддержке Российского фонда фундаментальных
исследований (грант № 06-01-00389), Программы поддержки Ведущих научных школ
России (грант № 2448.2006.1) и Роснауки (Госконтракт № 02.434.11.7061).
Литература
1. М.Ю.Овчинников,
В.И.Пеньков, И.Ю.Кирюшкин, Р.Б.Немучинский, А.А.Ильин, Е.Е.Нохрина, Опыт
разработки, создания и эксплуатации магнитных систем ориентации малых
спутников. М.: Препринт ИПМ им.М.В.Келдыша РАН, 2002, № 53.
2. Ю.М.Урличич, А.С.Селиванов, Ю.М.Тучин,
О.Е.Хромов, И.В.Никушкин, Технологический наноспутник минимальной
комплектации
ТНС-0. Аннотации докладов на III Конференции «Микротехнологии в авиации и
космонавтике», Санкт-Петербург, 8-9 июня,
3. Н.В.Куприянова, М.Ю.Овчинников, В.И.Пеньков,
А.С.Селиванов, Пассивная магнитная система ориентации первого российского
наноспутника ТНС-0, Препринт ИПМ им.М.В.Келдыша, 2005, №46.
4. A.Ilyin,
M.Ovchinnikov, V.Penkov, A.Selivanov,
Magnetic Attitude Control System for the Russian Nano-Satellite TNS-1, Paper
IAC-04-A.3.10 at the 55th Congress IAF, 4-8 Oct., 2004, Vancouver,
Canada.
5. В.А.Сарычев, М.Ю.Овчинников Магнитные
системы ориентации искусственных спутников Земли // Итоги науки и техники.
Сер.: Исследование космического пространства. М.: ВИНИТИ. Том 23. 1985.
6. В.В.Белецкий, А.Б.Новогребельский,
Существование устойчивых относительных равновесий искусственного спутника в
модельном магнитном поле // Астрономический журнал, т. 50, 1973.
7. А.А.Гончарский, А.А.Хентов, О некоторых
режимах вращения намагниченного спутника гиростата в геомагнитном поле //
Радиофизика, т. 15, N 11, 1972.
8. В.В.Белецкий, Движение искусственного
спутника относительно центра масс. М.: «Наука», 1965.
9. В.В.Белецкий, Движение спутника
относительно центра масс в гравитационном поле. М.: Издательство Московского
университета, 1975.
10. Н.Н.Моисеев,
Асимптотические методы нелинейной механики. М.: «Наука», 1971.
11. В.В.Белецкий, А.А.Хентов Вращательное движение намагниченного спутника. М.:
Наука. Главная редакция физико-математической литературы, 1985.
12. В.В.Сидоренко, Разрушение адиабатических
инвариантов на резонансах: пример из динамики твердого тела, М.: Препринт ИПМ
им.М.В.Келдыша РАН, 1995, N 76.
13. В.В.Сидоренко, Об одном классе движений
спутника, несущего сильный магнит // Космич. исслед. 2002, т 40, N 2.
14. D.A.Vallado,
W.D.McClain, Fundamentals of Astrodynamics and Application., Space
Technology Library, 2001.