Аннотация
Предложен численный метод построения границы и особых поверхностей области вариации суммарного
кинетического момента, создаваемого системой безупорных двухстепенных гироскопов – гиродинов.
Приведено описание метода продолжения по параметру, при помощи которого реализовано
построение указанных границы и особых поверхностей. С использованием результатов
Е.Н. Токаря формализованы достаточные условия, позволяющие в ряде случаев определить тип
особой поверхности. В качестве примера рассмотрены две различные конфигурации системы
из шести гиродинов. Для каждой их этих конфигураций построены области вариации собственного
кинетического момента и особые поверхности. Показаны возможности каждой конфигурации при
отказе одного гиродина.
Abstract
We describe the numerical technique for constructing boundaries and singular surfaces
of a variation range of an angular momentum created by a system of single gimbal control
moment gyros – gyrodines. We describe also a parameter continuation method, which is
a main part of the technique. Basing on results by E.N. Tokar, we formalize the sufficient
conditions, which indicate the type of singular surfaces. We apply the technique for
investigation of two various configurations of a system consisting of six gyrodines.
We construct their variation ranges and evaluate their operation capability in the case
of failure of a gyrodine.
1. Введение
Рассматривается система двухстепенных силовых
гироскопов – гиродинов, предназначенная для управления ориентацией космического
аппарата (КА). Для продолжительного поддержания заданной ориентации аппарата и
выполнения его разворотов с требуемой угловой скоростью система гиродинов
должна обладать достаточным запасом кинетического момента (КМ). Возможные
значения суммарного КМ, создаваемого гиродинами, образуют в системе координат,
жестко связанной с КА, некоторую область  . Эта область ограничена замкнутой поверхностью сложной
формы. Внутри области располагаются особые
поверхности, на которых управление гиродинами усложнено или вообще
неосуществимо. Данная работа посвящена численному построению границы области и её внутренних особых
поверхностей методом продолжения по параметру. По результатам Е. Н. Токаря [1]
сформулированы достаточные условия, позволяющие определить тип особой поверхности.
В качестве иллюстрации предлагаемого подхода построены границы и внутренние
особые поверхности двух различных конфигураций системы из шести гиродинов.
Исследованы возможности каждой конфигурации при отказе одного гиродина. . Эта область ограничена замкнутой поверхностью сложной
формы. Внутри области располагаются особые
поверхности, на которых управление гиродинами усложнено или вообще
неосуществимо. Данная работа посвящена численному построению границы области и её внутренних особых
поверхностей методом продолжения по параметру. По результатам Е. Н. Токаря [1]
сформулированы достаточные условия, позволяющие определить тип особой поверхности.
В качестве иллюстрации предлагаемого подхода построены границы и внутренние
особые поверхности двух различных конфигураций системы из шести гиродинов.
Исследованы возможности каждой конфигурации при отказе одного гиродина.
2. Система уравнений, задающая особые поверхности
Рассмотрим КА, представляющий собой
твердое тело, на котором установлены  одинаковых гиродинов.
Собственный КМ одинаковых гиродинов.
Собственный КМ  -ого гиродина обозначим -ого гиродина обозначим  , ,   . Для расчета суммарного КМ гиродинов введем . Для расчета суммарного КМ гиродинов введем  правую декартову
систему координат. Систему правую декартову
систему координат. Систему  , жестко связана с корпусом КА, система , жестко связана с корпусом КА, система  связана с -ым гиродином. Ось прецессии -ого гиродина параллельна оси связана с -ым гиродином. Ось прецессии -ого гиродина параллельна оси  , вектор его собственного КМ
направлен вдоль оси , вектор его собственного КМ
направлен вдоль оси  . .
Ориентацию системы координат относительно системы зададим с помощью
углов Эйлера  , ,  и и  (рис. 1). Эти углы определяются
следующим образом. Система может быть переведена
в систему тремя последовательными
поворотами (полагаем, что начала обе систем совпадают): 1) на угол вокруг оси (рис. 1). Эти углы определяются
следующим образом. Система может быть переведена
в систему тремя последовательными
поворотами (полагаем, что начала обе систем совпадают): 1) на угол вокруг оси  , 2) на угол вокруг новой оси , 2) на угол вокруг новой оси  , 3) на угол вокруг новой оси , совпадающей с осью . Углы и задают ориентацию оси
прецессии гиродина в системе . Угол задает поворот оси вокруг оси прецессии. , 3) на угол вокруг новой оси , совпадающей с осью . Углы и задают ориентацию оси
прецессии гиродина в системе . Угол задает поворот оси вокруг оси прецессии.
Суммарный КМ системы гиродинов имеет вид
 .
(2.1) .
(2.1)
Рассмотрим
область пространства , образованную точками (2.1) при всех значениях . Эта область является областью возможных значений КМ системы
гиродинов. В процессе управления ориентацией КА вектор (2.1) должен быть
заданной функцией времени , образованную точками (2.1) при всех значениях . Эта область является областью возможных значений КМ системы
гиродинов. В процессе управления ориентацией КА вектор (2.1) должен быть
заданной функцией времени  : :  . Управление будет невозможным, если . Управление будет невозможным, если  при некоторых значениях
. при некоторых значениях
.
В скалярном виде соотношение (2.1) имеет вид
  ,
(2.2) ,
(2.2)
 , ,  , ,  , ,
 , ,  , ,  . .
Поскольку величины , и  неизменны, формулы
(2.2) можно представить в виде неизменны, формулы
(2.2) можно представить в виде
 .
(2.3) .
(2.3)
Будем
использовать и векторную форму записи соотношения (2.3):  . Функции (2.3) определяют преобразование пространства . Функции (2.3) определяют преобразование пространства  векторов векторов  в трехмерное
пространство в трехмерное
пространство  векторов векторов  . При этом почти всем значениям . При этом почти всем значениям  соответствует
бесконечное множество значений соответствует
бесконечное множество значений  . .
Матрица Якоби, составленная из частных производных
функций (2.3)
 ,
(2.4) ,
(2.4)
имеет
размер  . Здесь . Здесь – индекс строки, – индекс строки,  – индекс столбца. Значения – индекс столбца. Значения
 , для которых , для которых
 ,
(2.5) ,
(2.5)
называют
особыми. В общем случае преобразование (2.3) не отображает окрестность точки  на полную окрестность
точки на полную окрестность
точки  , т.е. линейные вариации , т.е. линейные вариации  , где , где  , ,  , лежат в одной плоскости. Система гиродинов не способна
обеспечить изменение в направлении,
перпендикулярном этой плоскости. Следовательно, происходит частичная потеря
управляемости КА. , лежат в одной плоскости. Система гиродинов не способна
обеспечить изменение в направлении,
перпендикулярном этой плоскости. Следовательно, происходит частичная потеря
управляемости КА.
Точку будем называть особой
точкой в пространстве. В общем случае такие точки образуют некоторые поверхности  [1]. Плоскость,
которой принадлежат вариации [1]. Плоскость,
которой принадлежат вариации  в особой точке,
является касательной плоскостью к поверхности в особой точке,
является касательной плоскостью к поверхности  в этой точке.
Встречаются и вырожденные случаи, когда множества значений в этой точке.
Встречаются и вырожденные случаи, когда множества значений  образуют не
поверхности, а линии или изолированные точки. Очевидно, граница области возможных значений является одной из
особых поверхностей. Эту поверхность обозначим образуют не
поверхности, а линии или изолированные точки. Очевидно, граница области возможных значений является одной из
особых поверхностей. Эту поверхность обозначим  . Для систем гиродинов типично существование поверхностей , расположенных внутри области . . Для систем гиродинов типично существование поверхностей , расположенных внутри области .
В силу условия (2.5) при особом
значении существуют величины  , удовлетворяющие соотношениям , удовлетворяющие соотношениям
  , ,  .
(2.6) .
(2.6)
Эти
соотношения будем рассматривать как уравнения относительно неизвестных  , причем всюду будем считать, что , причем всюду будем считать, что  . Имеем . Имеем  уравнение относительно уравнение относительно
 неизвестных. Таким
образом, система уравнений (2.6) задает в пространстве некоторую двумерную поверхность неизвестных. Таким
образом, система уравнений (2.6) задает в пространстве некоторую двумерную поверхность
 , образованную особыми значениями . Преобразование (2.3) переводит эту поверхность в особую
поверхность в пространстве . Если , образованную особыми значениями . Преобразование (2.3) переводит эту поверхность в особую
поверхность в пространстве . Если  , то касательная плоскость к , то касательная плоскость к  в точке в точке  задается уравнением задается уравнением
 , ,
где  – единичная нормаль к
этой плоскости. – единичная нормаль к
этой плоскости.
Чтобы получить представление о форме
поверхности построим ее сечения
плоскостями  , где , где  – одно из чисел 1, 2,
3. Для этого систему уравнений (2.6) дополним уравнением – одно из чисел 1, 2,
3. Для этого систему уравнений (2.6) дополним уравнением  . И построим кривые, задаваемые получившейся системой: . И построим кривые, задаваемые получившейся системой:
 , ,
  ,
(2.7) ,
(2.7)
Кривые
(2.7) лежат в пространстве  , но можно рассматривать их проекции на пространстве , а преобразование (2.3) позволяет отобразить эти проекции в
пространство . Полученные в результате кривые представляют собой искомые
сечения. , но можно рассматривать их проекции на пространстве , а преобразование (2.3) позволяет отобразить эти проекции в
пространство . Полученные в результате кривые представляют собой искомые
сечения.
3. Типы особых точек
Различают особые точки двух типов –
проходимые и непроходимые [1]. Напомним их определения. Предположим, что
система гиродинов должна реализовать заданную гладкую функцию  , причем , причем  – особая точка,
отвечающая особому значению : – особая точка,
отвечающая особому значению :  . Если эта особая точка проходимая, то движение . Если эта особая точка проходимая, то движение  , ,  , реализующее такую функцию существует, но в общем случае не
является гладким. Если , реализующее такую функцию существует, но в общем случае не
является гладким. Если  , то , то  при при  (см. п. 6). Такое
движение нельзя выполнить технически. Если ограничиться гладкими движениями (см. п. 6). Такое
движение нельзя выполнить технически. Если ограничиться гладкими движениями  , ,  , то можно построить функцию , то можно построить функцию  , имеющую одинаковый годограф с исходной функцией , но удовлетворяющую условию , имеющую одинаковый годограф с исходной функцией , но удовлетворяющую условию  . В принципе, подходящим выбором . В принципе, подходящим выбором  можно обеспечить
равенство можно обеспечить
равенство  всюду, за исключением
малой окрестности точки всюду, за исключением
малой окрестности точки  . В случае непроходимой особой точки реализовать функцию непрерывным движением таким, что , нельзя. Очевидно, особая поверхность – граница области – непроходима. . В случае непроходимой особой точки реализовать функцию непрерывным движением таким, что , нельзя. Очевидно, особая поверхность – граница области – непроходима.
Определение типа особых точек требует исследования в
этих точках второго дифференциала преобразования (2.3). Пусть – особая точка в
пространстве . Тогда при и некотором справедливы
соотношения (2.6). Вектор  представляет собой
единичную нормаль касательной плоскости к особой поверхности в точке . Зададим два вектора представляет собой
единичную нормаль касательной плоскости к особой поверхности в точке . Зададим два вектора  и и  , лежащие в этой плоскости и удовлетворяющие соотношениям , лежащие в этой плоскости и удовлетворяющие соотношениям  , ,  . Векторы , . Векторы ,  и и  образуют
ортонормированный базис в . Рассмотрим главные члены компонент вариации в этом базисе: образуют
ортонормированный базис в . Рассмотрим главные члены компонент вариации в этом базисе:
 ,
(3.1) ,
(3.1)
 , ,  . .
В
силу (2.6) в правой части формулы (3.1) линейный по  член отсутствуют. Эта
правая часть представляет собой квадратичную форму относительно . Оказывается, в ряде случаев для определения типа особой
точки достаточно найти экстремумы этой квадратичной формы при условии член отсутствуют. Эта
правая часть представляет собой квадратичную форму относительно . Оказывается, в ряде случаев для определения типа особой
точки достаточно найти экстремумы этой квадратичной формы при условии
 , ,  . .
Иными
словами, следует найти экстремумы функции  при условии при условии  , ,  , где , где  и и
 , ,  . .
Матрица
 – симметричная и имеет
размер – симметричная и имеет
размер  , матрица , матрица  имеет размер имеет размер  ( ( – индекс столбца), причем – индекс столбца), причем  . .
Чтобы найти условный экстремум функции  воспользуемся методом
неопределенных множителей Лагранжа. Необходимое условие экстремума сводится к
системе уравнений воспользуемся методом
неопределенных множителей Лагранжа. Необходимое условие экстремума сводится к
системе уравнений
 , , ,
(3.2) , , ,
(3.2)
где
 , ,  - неопределенные
множители. Умножим первое уравнение системы (3.2) слева на матрицу , получим - неопределенные
множители. Умножим первое уравнение системы (3.2) слева на матрицу , получим
 . .
С
учетом уравнения можно записать
 . .
Подставив
полученное выражение в первое уравнение (3.2) будем иметь
 , ,
где  – единичная матрица
порядка . Рассмотрим собственные числа матрицы – единичная матрица
порядка . Рассмотрим собственные числа матрицы
 . .
Она
имеет порядок . Поскольку  , ,  , т. е. матрица , т. е. матрица  всегда имеет, по
крайней мере, два нулевых собственных числа. Из результатов [1] следует, что
если среди ненулевых собственных чисел есть числа разных
знаков, то особая точка проходима. Доказательство этого утверждения приведено в
п. 6. Если же матрица имеет всегда имеет, по
крайней мере, два нулевых собственных числа. Из результатов [1] следует, что
если среди ненулевых собственных чисел есть числа разных
знаков, то особая точка проходима. Доказательство этого утверждения приведено в
п. 6. Если же матрица имеет  ненулевых собственных
числа одного знака, то исследуемая особая точка непроходима [1]. Более
детальная классификация, особых точек содержится в [1, 2]. ненулевых собственных
числа одного знака, то исследуемая особая точка непроходима [1]. Более
детальная классификация, особых точек содержится в [1, 2].
4. Метод продолжения по параметру
Для численного решения системы нелинейных уравнений
(2.7) воспользуемся следующим алгоритмом [3]. Рассмотрим произвольную систему
нелинейных уравнений
 ,
(4.1) ,
(4.1)
где
 , ,  , – натуральное число. В этой системе число неизвестных на единицу
больше числа уравнений. В пространстве , – натуральное число. В этой системе число неизвестных на единицу
больше числа уравнений. В пространстве  уравнение (4.1) задает
кривую, которую обозначим уравнение (4.1) задает
кривую, которую обозначим  . Требуется построить эту кривую. Предположим, что известна
точка . Требуется построить эту кривую. Предположим, что известна
точка  . Из уравнений . Из уравнений
 , ,  , ,
способ
решения которых будет указан ниже, находим орт  касательной к кривой в этой точке. Здесь и
далее полагаем, что касательной к кривой в этой точке. Здесь и
далее полагаем, что
 . (4.2) . (4.2)
При
таком условии вектор определен с точностью
до знака. Направление выберем из условия  , где , где  – заданный вектор,
линейно независимый со строками матрицы – заданный вектор,
линейно независимый со строками матрицы  . Найти можно, решив
совместную систему уравнений . Найти можно, решив
совместную систему уравнений  , ,  и взяв и взяв  . .
Рассмотрим точку
 ,
(4.3) ,
(4.3)
где
 . В общем случае . В общем случае  , но при , но при  расстояние расстояние  от имеет порядок от имеет порядок  . Точку . Точку  , ближайшую к , будем искать в виде , ближайшую к , будем искать в виде  . Следуя методу Ньютона, для определения . Следуя методу Ньютона, для определения  получим приближенную
линейную систему получим приближенную
линейную систему
 . (4.4) . (4.4)
В
этой системе число уравнений на единицу меньше числа неизвестных, и чтобы однозначно
определить , выберем ее решение с минимальной евклидовой нормой.
Для отыскания такого решения
воспользуемся сингулярным разложением матрицы  . Оно имеет вид . Оно имеет вид
 . (4.5) . (4.5)
Здесь
 , ,  – матрица – матрица  и и  – матрица – матрица  удовлетворяют
соотношениям удовлетворяют
соотношениям
 , ,  , (4.6) , (4.6)
в
которых  – единичная матрица
порядка – единичная матрица
порядка  . Числа . Числа  называются сингулярными
числами матрицы и в общем случае
неотрицательны. В силу условия (4.2) они положительны. Подставив (4.5) в (4.4)
и воспользовавшись вторым соотношением (4.6), получим называются сингулярными
числами матрицы и в общем случае
неотрицательны. В силу условия (4.2) они положительны. Подставив (4.5) в (4.4)
и воспользовавшись вторым соотношением (4.6), получим
 . .
В
силу первого условия (4.6) решение последней системы можно взять в виде
 . (4.7) . (4.7)
С
помощью этого же условия можно доказать, что найденное выше решение имеет минимальную
евклидову норму среди всех решений системы (4.4). В силу диагональности матрицы
 ее обращение
выполняется тривиально. ее обращение
выполняется тривиально.
Пусть  – число,
характеризующее точность решения системы (4.1). Тогда при – число,
характеризующее точность решения системы (4.1). Тогда при  , взяв в качестве , повторяем описанные вычисления еще раз; при , взяв в качестве , повторяем описанные вычисления еще раз; при  полагаем, что полагаем, что  . Орт . Орт  касательной к в точке касательной к в точке  находится из условий находится из условий
 , ,  , ,  .
(4.8) .
(4.8)
Если
 достаточно мало, то в
силу последнего условия вектор направлен в ту же сторону
кривой , что и вектор . Найти можно тем же способом,
что и , взяв вместо достаточно мало, то в
силу последнего условия вектор направлен в ту же сторону
кривой , что и вектор . Найти можно тем же способом,
что и , взяв вместо  . Однако, используя матрицу сингулярного разложения
матрицы . Однако, используя матрицу сингулярного разложения
матрицы  , решение системы (4.8) можно выписать в явном виде , решение системы (4.8) можно выписать в явном виде
 .
(4.9) .
(4.9)
Аналогичную
формулу можно использовать и для определения
 , ,
где
теперь – соответствующая
матрица сингулярного разложения матрицы  . .
Определив , рассматриваем точку   и т.д. Если известно несколько
точек, принадлежащих кривой , то прогноз следующей точки можно сделать точнее, чем это
было только что указано. В описываемом алгоритме при определении первой точки
используется линейный прогноз (4.3), при определении второй и последующих точек
кубический прогноз, который рассчитывается с помощью интерполяционного полинома
Эрмита третьей степени. Для второй точки этот полином строится по векторам и т.д. Если известно несколько
точек, принадлежащих кривой , то прогноз следующей точки можно сделать точнее, чем это
было только что указано. В описываемом алгоритме при определении первой точки
используется линейный прогноз (4.3), при определении второй и последующих точек
кубический прогноз, который рассчитывается с помощью интерполяционного полинома
Эрмита третьей степени. Для второй точки этот полином строится по векторам  , , и . Аргументом полинома служит длина дуги кривой , и в данном случае, несмотря на свое название, этот полином
используется как экстраполяционный. Производная рассматриваемого полинома может
служить для экстраполяции в точку , , и . Аргументом полинома служит длина дуги кривой , и в данном случае, несмотря на свое название, этот полином
используется как экстраполяционный. Производная рассматриваемого полинома может
служить для экстраполяции в точку  орта касательной к в этой точке. Коль
скоро такая экстраполяция орта касательной к в этой точке. Коль
скоро такая экстраполяция  найдена, окончательный
расчет орта найдена, окончательный
расчет орта  касательной к в точке выполняется по формуле касательной к в точке выполняется по формуле
 , ,
где
– матрица из формулы
сингулярного разложения матрицы  . Использование новой формулы вместо аналога формулы (4.9)
позволяет увеличить знаменатель дроби, стоящей в правой части обеих формул. . Использование новой формулы вместо аналога формулы (4.9)
позволяет увеличить знаменатель дроби, стоящей в правой части обеих формул.
Длина шага  и последующих шагов
выбирается так, чтобы норма разности кубического и квадратического прогнозов не
превышала заданного порога. Квадратический прогноз рассчитывается с помощью
полинома Эрмита второй степени (для точки и последующих шагов
выбирается так, чтобы норма разности кубического и квадратического прогнозов не
превышала заданного порога. Квадратический прогноз рассчитывается с помощью
полинома Эрмита второй степени (для точки  полином строится по
векторам , и ). Такой прием обычно используется при выборе шага в методах
численного интегрирования обыкновенных дифференциальных уравнений [4]. Более подробное
описание метода продолжения по параметру содержится в [3]. полином строится по
векторам , и ). Такой прием обычно используется при выборе шага в методах
численного интегрирования обыкновенных дифференциальных уравнений [4]. Более подробное
описание метода продолжения по параметру содержится в [3].
Для применения алгоритма изложенного выше необходимо
иметь процедуры вычисления вектора  и матрицы Якоби и матрицы Якоби  . В данном случае . В данном случае  , в качестве компонент вектора принимаются левые
части уравнений системы (2.7). Матрица Якоби рассчитывается по
аналитическим формулам. Чтобы воспользоваться алгоритмом, необходимо знать
значение , в качестве компонент вектора принимаются левые
части уравнений системы (2.7). Матрица Якоби рассчитывается по
аналитическим формулам. Чтобы воспользоваться алгоритмом, необходимо знать
значение  хотя бы для одной
точки на исследуемой особой поверхности. Затем, меняя хотя бы для одной
точки на исследуемой особой поверхности. Затем, меняя  и в первом уравнении
(2.7), можно построить разнообразные сечения этой поверхности плоскостями и в первом уравнении
(2.7), можно построить разнообразные сечения этой поверхности плоскостями  . Значение . Значение  , задающее точку на особой поверхности, находится так. В системе
координат задается некоторый орт , задающее точку на особой поверхности, находится так. В системе
координат задается некоторый орт
 . Каждое скалярное произведение . Каждое скалярное произведение  зависит только от угла зависит только от угла
 . Пусть . Пусть  – корень уравнения – корень уравнения  при . Тогда при . Тогда  и и  удовлетворяют системе
(2.7) и, следовательно, задают особую точку. В частности, если удовлетворяют системе
(2.7) и, следовательно, задают особую точку. В частности, если   , то эта особая точка лежит на поверхности . В последней формуле , то эта особая точка лежит на поверхности . В последней формуле  можно заменить на можно заменить на  . .
При построении сечений особых поверхностей
использовались стандартные подпрограммы линейной алгебры для обращения матриц и
вычисления их собственных и сингулярных чисел. Результаты представлялись в системе
координат , по осям откладывались безразмерные величины
 , ,  , ,  . .
5. Построение и анализ особых поверхностей систем
гиродинов
В качестве примеров рассмотрим две системы из шести
гиродинов. Первая система представлена на рис. 2 и известна под названием 3-SPE. В этой системе каждой координатной оси  параллельны оси
прецессии двух гиродинов. Значения соответствующих углов и приведены в табл. 1.
Вторая система представлена на рис. 3. Здесь оси прецессии гиродинов параллельны
боковым ребрам правильной шестигранной пирамиды; значения углов и приведены в табл. 2. параллельны оси
прецессии двух гиродинов. Значения соответствующих углов и приведены в табл. 1.
Вторая система представлена на рис. 3. Здесь оси прецессии гиродинов параллельны
боковым ребрам правильной шестигранной пирамиды; значения углов и приведены в табл. 2.
Таблица 1
|
Угол,
|
1
|
2
|
3
|
4
|
5
|
6
|
|
|
90º
|
90º
|
90º
|
90º
|
0º
|
0º
|
|
|
90º
|
270º
|
0º
|
180º
|
90º
|
270º
|
Таблица 2
|
Угол,
|
1
|
2
|
3
|
4
|
5
|
6
|
|
|
55º
|
55º
|
55º
|
55º
|
55º
|
55º
|
|
|
180º
|
240º
|
300º
|
0º
|
60º
|
120º
|
В обоих случаях будем считать, что угловое движение
гиродинов относительно осей прецессии ничем не ограничено.
5.1 Система гиродинов 3-SPE. У этой системы поверхность обладает центральной
симметрией относительно точки  и зеркальной симметрией
относительно плоскостей и зеркальной симметрией
относительно плоскостей  . В такой ситуации можно ограничиться исследованием сечений
поверхности только плоскостями . В такой ситуации можно ограничиться исследованием сечений
поверхности только плоскостями  . На рис. 4 – 6 представлены сечения поверхности плоскостями . На рис. 4 – 6 представлены сечения поверхности плоскостями  , ,  и и  соответственно. На
рис. 5 в качестве примера показано сечение особой поверхности , расположенной внутри области . Здесь и далее на рисунках сечения непроходимых (проходимых)
особых поверхностей показаны сплошными (штриховыми) линиями. Поверхность системы 3-SPE является выпуклой и гладкой. соответственно. На
рис. 5 в качестве примера показано сечение особой поверхности , расположенной внутри области . Здесь и далее на рисунках сечения непроходимых (проходимых)
особых поверхностей показаны сплошными (штриховыми) линиями. Поверхность системы 3-SPE является выпуклой и гладкой.
Рассмотрим вид поверхности в случае, когда один
или два гиродина отключены (вышли из строя). При отключении одного гиродина без
ограничения общности можно считать, что отключен гиродин 4. Поверхность в этом случае обладает
центральной симметрией относительно точки и осевой симметрией
относительно прямой  . Сечения поверхности плоскостями , . Сечения поверхности плоскостями ,  и и  приведены на рис. 7 –
9. Рис. 10 – 12 иллюстрируют сечения этой поверхности плоскостями приведены на рис. 7 –
9. Рис. 10 – 12 иллюстрируют сечения этой поверхности плоскостями  , ,  и и  . Рис. 8 и 10 содержат, кроме того, соответствующие сечения
внутренних особых поверхностей . . Рис. 8 и 10 содержат, кроме того, соответствующие сечения
внутренних особых поверхностей .
При отключении двух гиродинов будем считать, что
отключены гиродины 2 и 4. Поверхность обладает центральной
симметрией относительно точки и осевой симметрией
относительно прямой  . На рис. 13 – 16 представлены сечения плоскостями , . На рис. 13 – 16 представлены сечения плоскостями ,  , и . Рис 17 показывает сечение плоскостью , и . Рис 17 показывает сечение плоскостью  . Рис. 14 содержит также сечения внутренних особых
поверхностей . . Рис. 14 содержит также сечения внутренних особых
поверхностей .
Если число работающих гиродинов уменьшается, то на
поверхности появляются вмятины
(см. рис. 7, 13), а внутри области возникают непроходимые
поверхности (см. рис. 8, 10, 14).
Эти эффекты связаны с отсутствием коллинеарной пары у некоторых гиродинов.
5.2 Система гиродинов «шестигранная пирамида». Поверхность этой системы обладает
центральной симметрией относительно точки и зеркальной
симметрией относительно плоскостей . На рис. 18 – 21 представлены сечения поверхности плоскостями  , , , ,  и и  соответственно. На
рис. 18 показаны сечения внутренних особых поверхностей . Поверхность системы шестигранная
пирамида имеет 12 вмятин (на рис. 21 видны 6 вмятин). Изнутри к вмятинам
примыкают непроходимые особые поверхности (см. рис. 18). соответственно. На
рис. 18 показаны сечения внутренних особых поверхностей . Поверхность системы шестигранная
пирамида имеет 12 вмятин (на рис. 21 видны 6 вмятин). Изнутри к вмятинам
примыкают непроходимые особые поверхности (см. рис. 18).
Рассмотрим вид поверхности при отключении (выходе
из строя) одного гиродина. Без ограничения общности можно считать, что отключен
гиродин 6. В этом случае поверхность обладает центральной
симметрией относительно точки и зеркальной
симметрией относительно плоскости  , образованной осями прецессии гиродинов 3 и 6. На рис. 22 –
25 представлены сечения поверхности плоскостями , , и , образованной осями прецессии гиродинов 3 и 6. На рис. 22 –
25 представлены сечения поверхности плоскостями , , и  соответственно. На
рис. 22 и 25 показаны сечения внутренних особых поверхностей . При отключении
одного из гиродинов на поверхности количество вмятин
сокращается с 12 до 10 (на рис. 25 видно 5 вмятин). Помимо особых непроходимых
поверхностей, примыкающих к вмятинам на поверхности , внутри области появляются
изолированные непроходимые поверхности. соответственно. На
рис. 22 и 25 показаны сечения внутренних особых поверхностей . При отключении
одного из гиродинов на поверхности количество вмятин
сокращается с 12 до 10 (на рис. 25 видно 5 вмятин). Помимо особых непроходимых
поверхностей, примыкающих к вмятинам на поверхности , внутри области появляются
изолированные непроходимые поверхности.
6. Приложение. Проходимые особые точки
Докажем достаточное условие проходимости
особой точки, сформулированное в конце п. 3. Пусть – особая точка и
составленная для нее система (3.2) допускает два решения, в одном из которых  , а в другом , а в другом  . Эти решения обозначим соответственно . Эти решения обозначим соответственно  , ,  и и  , ,  . Имеют место соотношения . Имеют место соотношения
 ,
(6.1) ,
(6.1)
 , ,  , ,
 , (6.2) , (6.2)
 , ,  . .
Пусть
через особую точку  проходит кривая проходит кривая
 ,
(6.3) ,
(6.3)
 . .
Покажем,
как ее можно реализовать в виде  , . Рассмотрим компоненты вектора , . Рассмотрим компоненты вектора  в базисе , , (см. п. 3) в базисе , , (см. п. 3)
 , ,  , ,
 , ,  , ,
 , ,  . .
С
другой стороны, используя разложение функций  в ряд Тейлора в окрестности
особой точки, запишем в ряд Тейлора в окрестности
особой точки, запишем
 , ,
где  . Отсюда получаем . Отсюда получаем
 ,
(6.4) ,
(6.4)
 , ,
 . .
В
первом выражении (6.4) в силу условий (2.6) отсутствуют члены первой степени
относительно  . .
Пусть для определенности  . Главные члены кривой в окрестности точки ищем в виде . Главные члены кривой в окрестности точки ищем в виде
 (6.5) (6.5)
где
 и и  – не определенные пока
коэффициенты. В силу (6.1) и (6.2) подкоренные выражения в (6.5) положительны.
Подставим формулы (6.5) в первое выражение (6.4). Получим. – не определенные пока
коэффициенты. В силу (6.1) и (6.2) подкоренные выражения в (6.5) положительны.
Подставим формулы (6.5) в первое выражение (6.4). Получим.
 при при  , ,
 при при  , ,
Таким
образом, функция  имеет требуемый вид.
Подстановка формул (6.5) во второе выражение (6.4) дает имеет требуемый вид.
Подстановка формул (6.5) во второе выражение (6.4) дает
 при , при ,
 при . при .
Оба
множителя при здесь должны быть
равны  . Это приводит к уравнениям относительно и : . Это приводит к уравнениям относительно и :
 , (6.6) , (6.6)
 . (6.7) . (6.7)
Рассмотрев
аналогичным образом  , получим еще два уравнения , получим еще два уравнения
 , (6.8) , (6.8)
 . (6.9) . (6.9)
Системы (6.6), (6.8) и (6.7), (6.9) разрешимы и
определяют коэффициенты и соответственно, но не
единственным образом. По этой причине построенная кривая не единственна. Ее
недостаток – производные  не ограничены при . Преодолеть этот недостаток можно взяв, например, не ограничены при . Преодолеть этот недостаток можно взяв, например,
где
коэффициенты и имеют указанный выше
вид. Тогда вместо (6.3) получим
 , ,
что
приводит к соотношению  . .
Литература
1. Токарь Е.Н., Платонов В.Н., Исследование особых
поверхностей систем безупорных гиродинов. Космические исследования, т. XVI, выпуск 5, 1978.
2. Токарь Е.Н., Проблемы управления гиросиловыми
стабилизаторами. Космические исследования, т. XVI, выпуск 2, 1978.
3. Балабан И.Ю., Комаров М.М., Сазонов В.В., Решение
систем нелинейных уравнений методом продолжения по параметру. Препринт Института
прикладной математики им. М.В. Келдыша РАН, № 3, 1997.
4. Хайрер Э., Нерсет С., Ваннер
Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи. М., Мир,
1990.
Рисунки
Рис. 1. Системы
координат.
Рис. 2. Система 3-SPE.
  Рис. 3. Система <шестигранная пирамида>. Рис. 3. Система <шестигранная пирамида>.

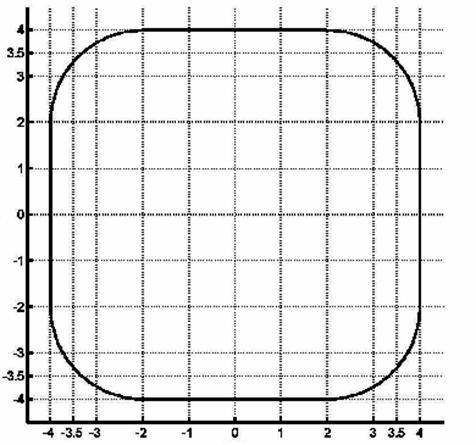

Рис. 4. Плоскость  . .
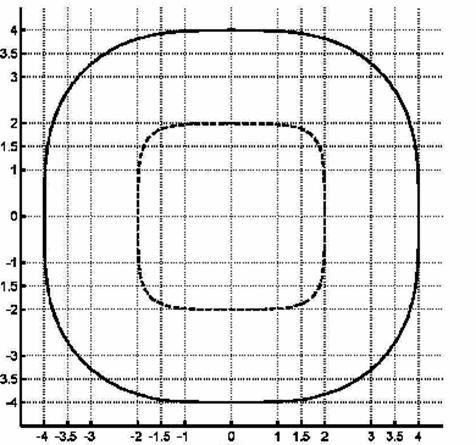
Рис. 5. Плоскость  . .

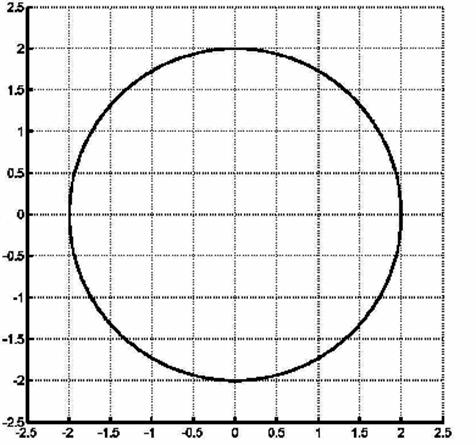

Рис. 6. Плоскость  . .
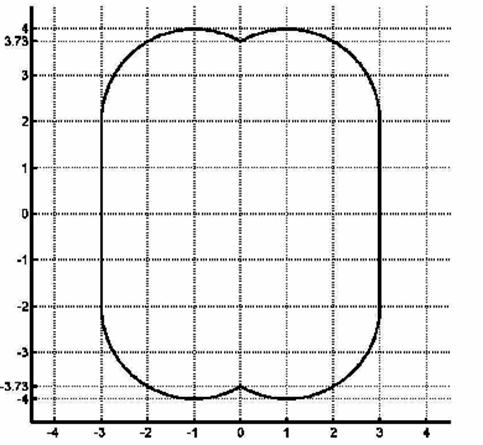
Рис. 7. Плоскость  . .

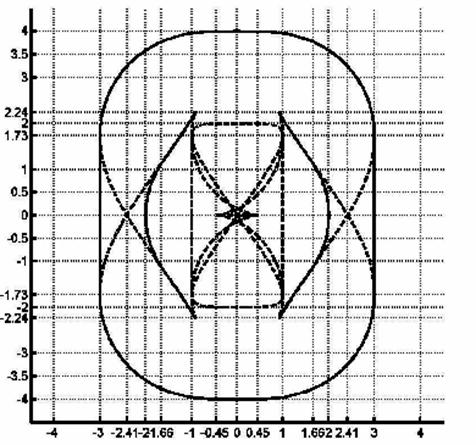

Рис. 8. Плоскость  . .
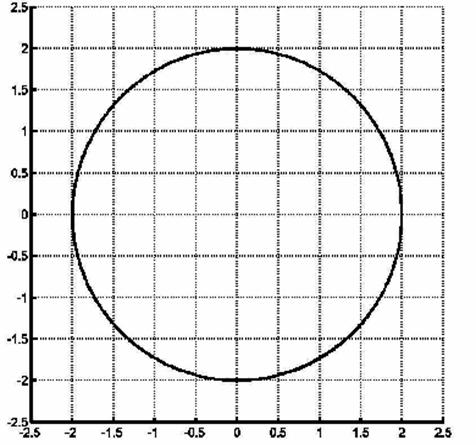
Рис. 9. Плоскость  . .

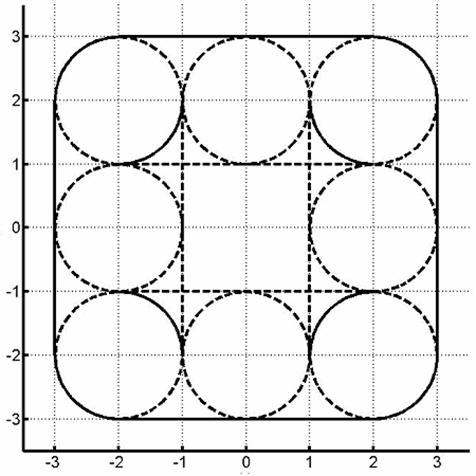

Рис. 10. Плоскость  . .

Рис. 11. Плоскость  . .

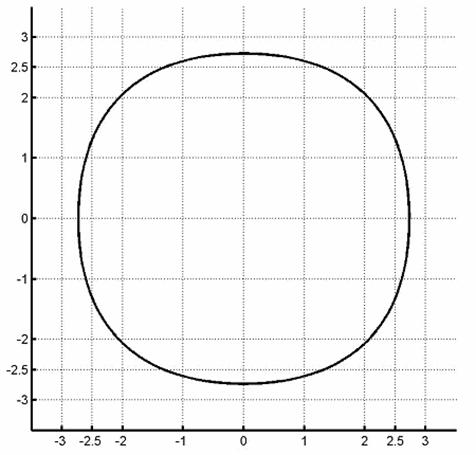

Рис. 12. Плоскость  . .

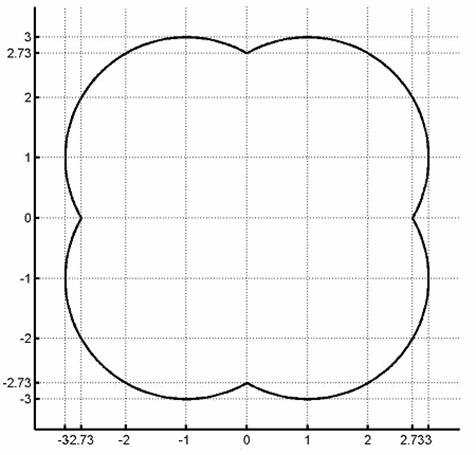
Рис. 13. Плоскость  . .



Рис. 14. Плоскость  . .
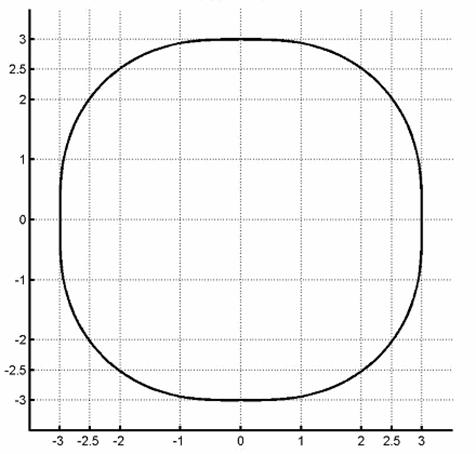
Рис. 15. Плоскость  . .

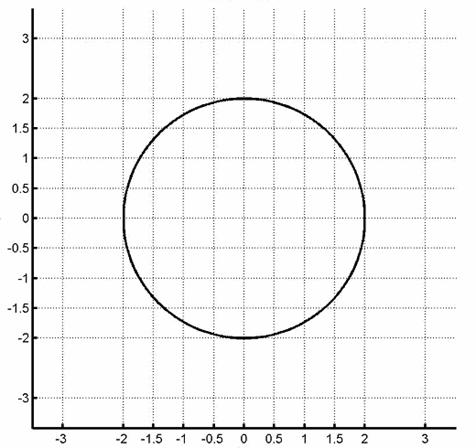

Рис. 16. Плоскость  . .

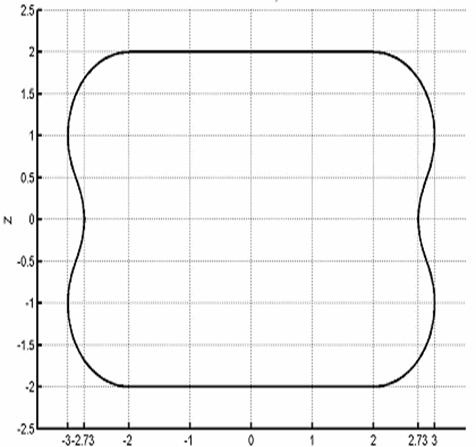
Рис. 17. Плоскость  . .


Рис. 18. Плоскость  . .

Рис. 19. Плоскость  . .

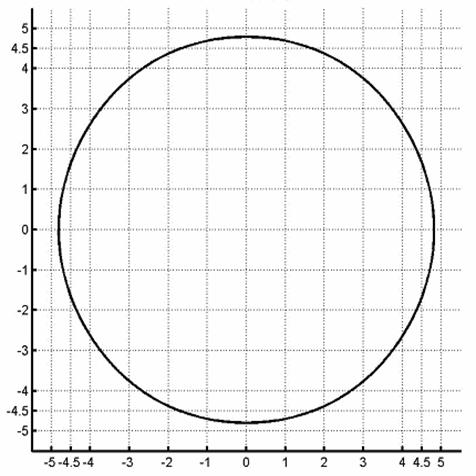

Рис. 20. Плоскость  . .
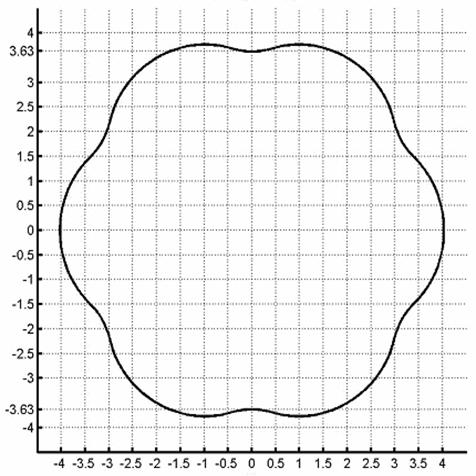
Рис. 21. Плоскость  . .

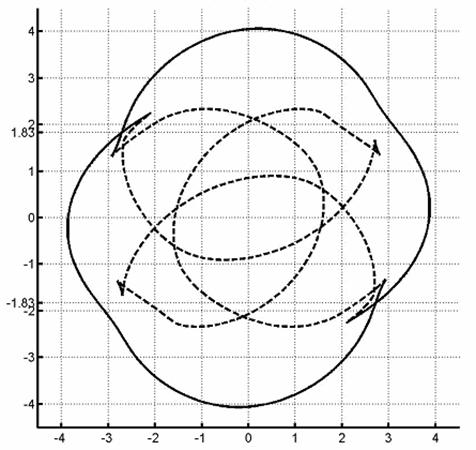

Рис. 22. Плоскость  . .
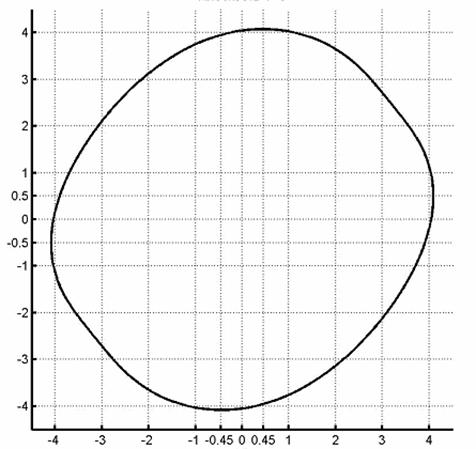

Рис. 23. Плоскость  . .

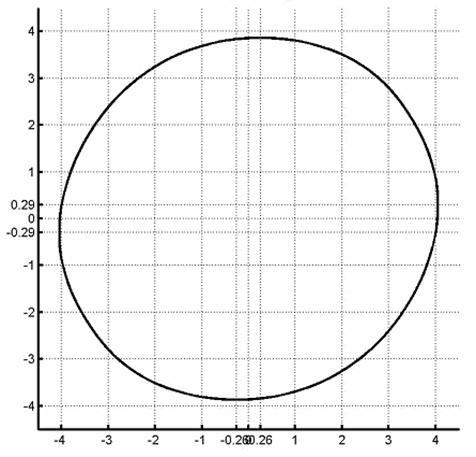

Рис. 24. Плоскость  . .
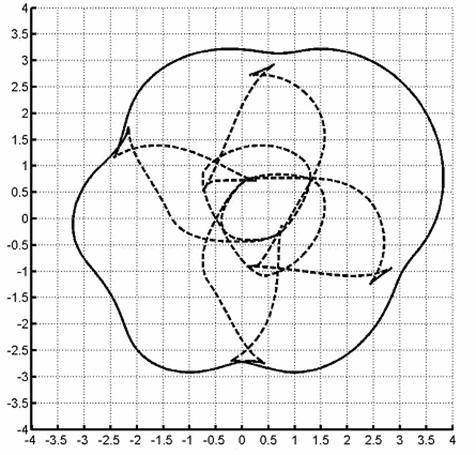
Рис. 25. Плоскость  . .
|