Аннотация
Приведено описание структуры программного комплекса для моделирования гидравлической системы
управления шагающей машины (ШМ). Приведен пример работы с программным комплексом при
моделировании различных вариантов гидравлической системы управления (ГСУ) ШМ и различных
режимах движения.
Abstract
The description of structure of a program complex for computer simulation of hydraulic control
system of the walking machine (WM) is given. The example of work with a program complex is
given at computer simulation various variants of a hydraulic control system WM and various
modes of movement.
Содержание
1. Математическая
модель гидропривода одной степени свободы
ноги ШМ при использовании
насоса с LS-управлением ……………3
2. Структура
программного комплекса……………………………….…6
3. Описание
модулей………………………………..………………….…7
4. Порядок работы с
программным комплексом……..…………………8
5. Возможные ошибки при
работе программного комплекса…………11
6. Пример работы с
программным комплексом………………………..12
Список
литературы…….………………………………………………….17
Введение
При проектировании шагающих машин большого размера предназначенных для
грузоподъёмных, транспортных, аварийно-спасательных операций одной из основных проблем является разработка привода
ног. Привод должен работать при значительных нагрузках и малых скоростях в
течение фазы опоры и больших скоростях и малых нагрузках в течение фазы
переноса.
Среди основных типов гидроприводов, применяемых на сегодняшний день в
технике, был выбран гидропривод с машинно-дроссельным регулированием, который позволяет
обеспечить достаточно высокие динамические характеристики при высоких
энергетических показателях. После предварительного анализа было решено
использовать на ШМ гидропривод с машинно-дроссельным регулированием с
использованием насоса с LS-регулированием (load sensing – чувствительный к
нагрузке) (рис.1).
1. Математическая модель
гидропривода одной степени свободы ноги ШМ при использовании насоса с LS-управлением
Гидравлическая система управления (ГСУ) шагающей машины (ШМ) приведена
на рис.2. ГСУ одной ноги, имеющей три степени свободы, включает в себя три гидроцилиндра, три пропорциональных
распределителя и один насос с LS-управлением (load sensing – чувствительный к
нагрузке). Математическая модель гидросистемы основана на уравнениях,
определяющих расходы жидкости через дроссельные устройства, на уравнениях
неразрывности течения, на уравнениях состояния рабочей жидкости и на уравнениях
движения отдельных механических звеньев.
Математическая модель включает в себя
математические модели пропорционального распределителя, гидроцилиндра, насоса с
LS-управлением.
При составлении
математической модели были приняты следующие допущения: коэффициенты расходов
дросселей и рабочих окон золотника являются
постоянными, перетечки рабочей жидкости через радиальные зазоры
золотников и гидроцилиндров пренебрежимо малы, нагружающий момент на шайбе
насоса создается только приведенной к штоку гидроцилиндра массой подвижных
частей, давление слива постоянно, гидродинамические силы, действующие на
золотники, учитываются как действия гидродинамических пружин, силы сухого
трения в распределителях и гидроцилиндрах не учитывались.
Математическая
модель насоса с LS-управлением.
Математическая модель насоса включает в себя
математические модели LS-распределителя, ограничителя давления, цилиндров управления, а также
соотношения, определяющие подачу насоса, и расходы рабочей жидкости в
управляющем каскаде.
Подача насоса:  , где , где  характерный объём насоса; характерный объём насоса;  максимальный угол поворота шайбы; максимальный угол поворота шайбы;  угловая скорость вращения вала насоса; угловая скорость вращения вала насоса;  текущее значение угла поворота шайбы насоса. текущее значение угла поворота шайбы насоса.
 , где , где  координата, определяющая положение поршня гидроцилиндра; координата, определяющая положение поршня гидроцилиндра;  максимальное значение, которое может принимать максимальное значение, которое может принимать  ; ;  радиус опорной шайбы насоса. радиус опорной шайбы насоса.
Уравнение движения плунжера LS-золотника:
 , ,
где  масса плунжера LS-золотника и присоединенных
к нему подвижных частей; масса плунжера LS-золотника и присоединенных
к нему подвижных частей;  перемещение плунжера LS-золотника; перемещение плунжера LS-золотника;  коэффициент,
учитывающий вязкое трение в зазоре между плунжером LS-золотника и
корпусом; коэффициент,
учитывающий вязкое трение в зазоре между плунжером LS-золотника и
корпусом;  жесткость пружины; жесткость пружины;  сила предварительного поджатия пружины; сила предварительного поджатия пружины;  гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости; гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости;  площадь плунжера золотника. площадь плунжера золотника.
Уравнения аналогичного вида описывают
движение плунжера ограничителя давления.
Уравнение
движения шайбы насоса и штоков гидроцилиндров управления:

где  массы поршней гидроцилиндров управления и присоединенных к
ним подвижных частей механизма регулировки подачи насоса; массы поршней гидроцилиндров управления и присоединенных к
ним подвижных частей механизма регулировки подачи насоса;  коэффициенты вязкого трения в зазорах между поршнями и гильзами
цилиндров управления; коэффициенты вязкого трения в зазорах между поршнями и гильзами
цилиндров управления;  жёсткость пружины гидроцилиндра управления №1; жёсткость пружины гидроцилиндра управления №1;  сила предварительного поджатия пружины; сила предварительного поджатия пружины;  площади поршней гидроцилиндров управления; площади поршней гидроцилиндров управления;  суммарный момент сопротивления, приложенный к органу
регулирования насоса, суммарный момент сопротивления, приложенный к органу
регулирования насоса,  перемещение штока гидроцилиндра управления. перемещение штока гидроцилиндра управления.
В соответствии с принципиальной схемой насоса
с LS-золотником и ограничителем давления (рис.1) соотношения,
определяющие расход через LS-золотник и ограничитель давления в зависимости от
положения плунжеров LS-распределителя и ограничителя давления:
Если  и и  , то , то
Для других случаев
смещения плунжеров ограничителя давления
и LS-золотника соотношения имеют аналогичный вид [3].
Математическая
модель пропорционального распределителя включает в себя уравнения движения
плунжеров пилотного и основного золотников, уравнения напряжения в обмотке
электромагнита, соотношения определяющие расходы рабочей жидкости в управляющем
каскаде.
Уравнение движения плунжера
пилотного золотника:

где  масса пилотного золотника; масса пилотного золотника;  коэффициент, учитывающий вязкое трение в зазоре между
золотником и корпусом; коэффициент, учитывающий вязкое трение в зазоре между
золотником и корпусом;  гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости; гидродинамическая
сила, действующая на золотник со стороны рабочей жидкости;  сила электромагнита; сила электромагнита;  жесткость пружины пилотного золотника. жесткость пружины пилотного золотника.

где  масса золотника; масса золотника;  коэффициент, учитывающий вязкое трение в зазоре между
плунжером основного золотника и гильзой; коэффициент, учитывающий вязкое трение в зазоре между
плунжером основного золотника и гильзой;  жесткость пружины основного золотника; жесткость пружины основного золотника;  гидродинамическая сила, действующая на плунжер основного
золотника со стороны рабочей жидкости; гидродинамическая сила, действующая на плунжер основного
золотника со стороны рабочей жидкости;  сила сухого трения действующая на плунжер основного
золотника; сила сухого трения действующая на плунжер основного
золотника;  перепад давления рабочей жидкости на торцах плунжера
основного золотника; перепад давления рабочей жидкости на торцах плунжера
основного золотника;  площадь торца плунжера основного золотника. площадь торца плунжера основного золотника.
Уравнение движения
поршня силового гидроцилиндра имеет вид:

где  приведенная масса поршня и подвижных элементов нагрузки; приведенная масса поршня и подвижных элементов нагрузки;  коэффициент вязкого трения в силовом гидроцилиндре; коэффициент вязкого трения в силовом гидроцилиндре;  внешняя нагрузка, действующая на шток. внешняя нагрузка, действующая на шток.
Система дифференциальных уравнений, описывающих работу гидравлической
системы управления одной ноги ШМ, приведённая к нормальной форме Коши имеет
41-й порядок.

















Начальные условия:
 , , , ,  , ,  , ,   , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  , ,  . .
Для решения системы дифференциальных уравнений был составлен
программный комплекс, позволяющий исследовать динамические и энергетические
характеристики как гидросистемы.
2. Структура программного
комплекса
Программный комплекс состоит из
управляющей программы и набора программных модулей, обеспечивающих ведение
диалога, вычислительного процесса, обмен данными и обработку данных, вывод
результатов моделирования в графическом виде (рис.3).
Программный комплекс
реализован в среде объектно-ориентированного программирования, основой которой
является язык Object Pascal. Он позволяет достаточно быстро создавать
приложения различной степени сложности.
Программный комплекс даёт
возможность:
·
исследовать динамические режимы ГСУ, для оценки которых можно
определять показатели качества системы: колебательность, величину
перерегулирования переходного процесса при ступенчатом входном воздействии;
точность отслеживания синусоидалього сигнала и сигнала пропорционального
требуемой скорости исполнительных гидроцилиндров при движении ШМ «трёшками»;
·
определять энергетические характеристики системы (к.п.д., мощность).
Результаты моделирования выводятся на
монитор компьютера. Также, программный комплекс позволяет, используя
соответствующие меню, получить результат моделирования в виде твёрдой копии.
Техника расчёта
основана на численном решении системы обыкновенных дифференциальных уравнений,
описывающих процессы во всех элементах ГСУ (пропорциональный распределитель,
насос, гидроцилиндр).
Для решения
системы обыкновенных дифференциальных уравнений используется метод Рунге-Кутты
с модификацией Мерсона.
3. Описание
модулей
Программа состоит
из девяти модулей: GPP1, GPP2, GPP3, GPP4, GPP5 GPP6,
GPP7, GPP8, Gpfpp3.
Модули GPP1 – GPP7 служат для ввода данных, а так же для прорисовки окон и меню, которые
служат для ввода информации.
Модуль GPP1 служит для прорисовки окна для входа в программный комплекс.
Модуль GPP2 служит для прорисовки основного рабочего окна программного комплекса и
управления вводом данных всех элементов ГСУ.
Модуль GPP3 служит для ввода параметров ГСУ поворота стойки, GPP4 – бедра, GPP5 – голени.
Модуль GPP8 служит для вывода результатов моделирования в виде графиков.
Модуль Gpfpp3 служит для решения системы обыкновенных дифференциальных уравнений. В
нём помещена процедура, реализующая метод Рунге-Кутта с модификацией Мерсона.
Дифференциальные уравнения, описывающие работу ГСУ, записаны в нормальной форме
Коши.
В модуле Gpfpp3 содержится 12 процедур (PZ1, PZ2,
PZ3, CS1, CS2, CS3 PUMP, GUID, FRMBF, MERSON, FCT, RUN) и одна функция (SIGN).
В процедуре
PZ1 реализованы уравнения, описывающие работу двухступенчатого
распределителя с пропорциональным управлением для ГСУ поворота стойки. В эту
процедуру входят уравнения, описывающие работу электромагнита, движение
плунжера пилотного золотника, движение плунжера основного золотника, уравнения
определяющие расходы в управляющем каскаде распределителя и давления в
управляющих полостях основного золотника.
В процедурах PZ2, PZ3 реализованы аналогичные уравнения, описывающие работу двухступенчатых
пропорциональных распределителей для ГСУ бедра и голени.
В процедуре CS1 реализованы уравнения, описывающие движение поршня
исполнительного гидроцилиндра привода поворота стойки и уравнения давлений в
его полостях. Аналогичные уравнения, описывающие движение силовых
гидроцилиндров бедра и голени, реализованы в процедурах CS2, CS3.
Процедура Guid служит для
задания входных управляющих сигналов для ГСУ каждой степени подвижности ноги. В
зависимости от выбора в меню «Входной сигнал» входное
напряжение может иметь ступенчатый, синусоидальный вид, либо быть
пропорциональным расчётным скоростям для исполнительных гидроцилиндров в
шарнирах ноги.
Процедура Nagr реализует
задание нагрузок, действующих на исполнительные гидроцилиндры. В зависимости от
выбора в меню «Нагрузка» можно выбрать либо нагрузки, действующие на исполнительные
гидроцилиндры при движении ШМ «трёшками», либо постоянную нагрузку произвольной
величины.
В процедуре Pump реализованы
уравнения, описывающие работу элементов, входящих в насос:
-
движение плунжера LS-золотника,
-
движение плунжера ограничителя давления,
-
движение поршней цилиндров управления,
-
соотношения, определяющие расход в
каскаде управления.
Так же здесь
вычисляются величина подачи и давления, развиваемого насосом.
Процедура Merson реализует метод
Рунге-Кутты в модификации Мерсона.
Процедура Run служит для запуска
программного комплекса на счёт.
4. Порядок работы с программным
комплексом
Для запуска
программы необходимо запустить файл ProjectGPP.exe.
После запуска
программы высвечивается окно программы с надписью «Моделирование ГСУ шагающей
машины» рис.4.
Для того чтобы войти в
систему необходимо щелкнуть левой кнопкой мыши на кнопке ВХОД. При этом на экране
появляется рабочее окно программы, которое озаглавлено «Ввод параметров элементов ГСУ».
Рабочее окно представлено на рис.5. На экране показаны панели, при помощи которых
вызываются меню для ввода значений параметров ГСУ поворота стойки, ГСУ бедра,
голени, регулируемого насоса, параметров интегрирования, параметров рабочей
жидкости, типа гидроцилиндров и вывода результатов.
Внизу окна находится кнопка Исполнение,
при помощи которой можно запустить программный комплекс на счёт.
Меню для ввода параметров каждой из
ГСУ вызывается путём щелчка левой кнопки мыши на панели с названием этой ГСУ.
После этого на экране появляется меню со списком элементов, входящих в ГСУ.
На рис.6.
представлено рабочее окно для ввода параметров ГСУ поворота стойки.
В меню «Коэффициенты обратных связей»
(рис.6) необходимо ввести коэффициенты
обратных связей по положению пилотного и основного золотников, исполнительного
гидроцилиндра, коэффициент обратной связи по скорости гидроцилиндра, а также
соответствующие им коэффициенты усиления.
В меню «Параметры электромагнита» (рис.7)
вводятся следующие параметры:
-
значения активного сопротивления обмотки электромагнита,
-
индуктивности,
-
длины средней линии якоря,
-
коэффициент усиления электромагнита,
-
величина воздушного зазора между якорем и сердечником.
В меню «Параметры пилотного золотника»
вводятся:
-
приведённая масса плунжера золотника и всех подвижных частей,
соединенных с ним,
-
диаметр плунжера золотника,
-
жёсткость центрирующих пружин,
-
коэффициент полноты использования периметра гильзы золотника,
-
максимальное смещение плунжера золотника,
-
коэффициент расхода окна золотника,
-
диаметр дросселя,
-
коэффициент расхода дросселя.
В меню «Параметры основного золотника»
вводятся:
-
диаметр плунжера золотника,
-
приведенная масса плунжера основного золотника,
-
жесткость центрирующих пружин,
-
коэффициенты перекрытия гильзы основного золотника для поршневой и
штоковой полости,
-
максимальное смещение плунжера золотника,
-
коэффициент расхода окна гильзы.
В меню «Параметры силового гидроцилиндра»
вводятся:
-
диаметр поршня,
-
диаметр штока гидроцилиндра,
-
приведенная масса нагрузки,
-
жёсткость позиционной нагрузки.
На рис.8
представлены окна для ввода параметров ГСУ бедра. Порядок ввода для них
является таким же, как и для ГСУ поворота стойки.
Для вызова меню ввода
параметров регулируемого насоса необходимо левой кнопкой мыши щелкнуть на
панели «Ввод параметров насоса».
В подменю «Параметры
насоса» рис.9 вводятся:
-
рабочий объём насоса,
-
частота вращения вала насоса,
-
радиус опорной шайбы,
-
максимальный угол наклона шайбы,
-
максимальное давление насоса,
-
давление слива.
В подменю «Параметры
цилиндров управления» вводятся:
-
диаметр поршня гидроцилиндра управления №1 (ЦУ№1),
-
диаметр поршня гидроцилиндра управления №2 (ЦУ№2),
-
приведенные массы поршней гидроцилиндров управления,
-
сила предварительного поджатия пружины в ЦУ№1,
-
диаметр дросселя,
-
коэффициент расхода дросселя,
-
радиальный зазор между поршнем ЦУ №2 и гильзой,
-
коэффициент расхода канала в поршне,
-
жёсткость пружины ЦУ №1.
В подменю «Параметры
LS-золотника» необходимо ввести:
-
диаметр золотника,
-
приведенную массу плунжера LS-золотника,
-
максимальное смещение плунжера,
-
жесткость пружины,
-
силу поджатия пружины,
-
коэффициент полноты гильзы золотника,
-
коэффициент расхода окна гильзы.
В подменю «Параметры
ограничителя давления» вводятся те же параметры, что и для LS-золотника.
Щелчком левой кнопки мыши на
панели «Параметры рабочей жидкости» вызывается меню для ввода
плотности, модуля объёмной упругости, кинематической вязкости рабочей жидкости.
Параметры интегрирования
вводятся в меню «Ввод параметров интегрирования». Здесь необходимо выбрать
метод интегрирования, характер входного сигнала, начальные значения всех
величин, а также промежуток времени, для которого будет производиться расчёт.
Тип входного сигнала может быть ступенчатым, синусоидальным, а также иметь вид
аналогичный величинам скоростей в шарнирах ноги при движении ШМ «трёшками». При
выборе ступенчатого или синусоидального сигнала задается величина сигнала для
каждой ГСУ, а для синусоидального так же и частота.
В меню «Тип нагрузки»
следует задать нагрузку, которая действует на исполнительные гидроцилиндры. Это
может быть либо нагрузка, которая действует на исполнительные гидроцилиндры при
движении ШМ «трёшками», также для этого случая можно ввести коэффициенты для
нагрузки каждого гидроцилиндра при моделировании движения ШМ с широкой колеёй.
Также можно ввести для
каждого привода произвольную постоянную нагрузку.
В меню для ввода начальных
данных (рис.10) необходимо
ввести промежуток времени (начало обычно Т0=0), на котором будет производиться
моделирование, и начальные значения для всех переменных. Для начальных значений
перемещений гидроцилиндров введены параметры, соответствующие началу фазы опоры.
После ввода параметров какого-либо
элемента необходимо нажать кнопку «ОК», при этом произойдет ввод заданных
параметров и закроется меню этого элемента.
В меню «Тип привода» рис.5 предлагается
выбрать варианты гидросхемы и типа
гидроцилиндра:
-
гидросхемы с шестью насосами (на каждую ногу приходится один насос),
-
гидросхемы с двумя насосами (один насос приходится на одну «трёшку»).
Также здесь необходимо
выбрать тип гидроцилиндров (одноштоковый или двухштоковый). Выбор двухштоковых гидроцилиндров означает, что
расчёт будет вестись для схемы с одноштоковым
гидроцилиндром, подключённым по дифференциальной схеме.
Величины, стоящие в полях
ввода для каждого параметра, были выбраны для работы ГСУ в следящем режиме по
скорости исполнительных гидроцилиндров, подключенных по стандартной схеме, и
позволяют отслеживать входной сигнал с высокой точностью, при работе одного
насоса на одну ногу.
Кнопка «Исполнение» запускает
программный комплекс на счёт.
Время, необходимое для
расчёта характеристик, зависит от интервала времени, на котором производится
моделирование. Для одного шагового цикла (Тк=3.66с), при расчёте на компьютере с процессором Intel Celeron® 533, необходимое
время равно 9мин. Для двух шаговых циклов (Тк=7.32с) время равно 18 мин.
Для просмотра результатов
моделирования служит меню «Вывод результатов».
Для ГСУ каждой
степени подвижности ноги можно получить как функцию от времени величины:
-
входного напряжения,
-
силы тока,
-
перемещение пилотного золотника,
-
перемещение основного золотника,
-
ход гидроцилиндра,
-
скорость гидроцилиндра,
-
внешнюю нагрузку, действующую на шток
гидроцилиндра.
Для LS-золотника можно
получить графики перемещения и скорости
плунжера золотника.
При помощи меню «Насос»
на экран можно вывести графики изменения величины давления насоса, подачи
насоса, мощности насоса, к.п.д., хода цилиндров управления в зависимости от
времени.
Перед тем как
просмотреть следующий график необходимо нажать кнопку «Очистить», которая
находится ниже поля для вывода графиков или нажать клавишу «пробел».
Программный
комплекс позволяет моделировать ГСУ при различных нагрузках, действующих на
исполнительные гидроцилиндры в степенях подвижности ШМ.
Структура
программного комплекса позволяет после доработки использовать его для моделирования
гидравлических систем управления различной структуры и сложности.
5. Возможные ошибки при работе программного комплекса
Для того чтобы
избежать аварийной остановки работы программного комплекса необходимо вводить
корректные данные для параметров ГСУ.
При начале ввода
параметров ГСУ необходимо убедится в том, что на компьютере в качестве
разделителя целой и дробной частей установлена точка, а не запятая. В противном
случае программа выдаст сообщение об ошибке и порядке её устранения.
Недопустимо
вводить нулевые значения приведенных масс.
Следует особо отметить, что для корректной работы программного комплекса
необходимо войти в меню ГСУ каждой степени подвижности ноги, насоса, даже в том
случае, если вы не собираетесь изменять значения стоящие в полях для каждого
элемента, определить тип гидроцилиндров, количество насосов (два насоса или
шесть), задать метод интегрирования, ввести параметры нагрузки, задать входной
сигнал.
Если после
нажатия кнопки «Исполнение» программа выдала ошибку с плавающей точкой, то
скорей всего это произошло из-за того, что вы не вошли в меню одного из ГСУ или
насоса, либо не задали параметры интегрирования.
Для того, чтобы
произошёл ввод параметров ГСУ нет необходимости входить в меню каждого
элемента, достаточно лишь щёлкнуть левой кнопкой мыши по панели с названием ГСУ
и после появления окна ввода параметров внизу нажать кнопку ОК.
Если были введены
такие параметры элементов ГСУ, что система работает неустойчиво, то возможна
аварийная остановка работы программы. Это может произойти, например, в случае
если параметры насоса таковы, что его подача меньше величины расхода,
необходимого гидроцилиндрам ГСУ, в этом случае давление насоса будет резко
падать и принимать отрицательное значение. Для того чтобы устранить эту ошибку
необходимо выбрать бóльшую величину рабочего объёма насоса или увеличить
частоту вращения вала насоса.
Также это может
произойти в случае неустойчивой работы ГСУ при выборе некорректных
коэффициентов усиления или коэффициентов обратных связей.
6. Пример работы с
программным комплексом
После запуска файла ProjectGPP.exe на экране появится
окно с надписью «Моделирование гидравлической системы управления шагающей
машины» (рис.4).
После щелчка мыши на кнопке
«Вход» на экране появится рабочее окно программы.
После щелчка мыши на
панели с названием «Привод поворота стойки» на экране появится окно с названиями всех
элементов, входящих в ГСУ поворота стойки (рис.5).
После щелчка левой кнопки
мыши на панели «Коэффициенты обратных связей» на экране появится меню с
названиями всех коэффициентов обратных связей и соответствующих им
коэффициентов усиления и полями для ввода их значений. В полях для ввода уже
стоят значения, которые были подобраны для
устойчивой работы ГСУ в следящем режиме по скорости штока исполнительного
гидроцилиндра. Для изменения значений, стоящих в полях ввода необходимо навести
указатель мыши на поле и щелкнуть левой кнопкой, после этого можно производить
редактирование.
Ниже приведены значения
коэффициентов, которые предварительно введены
в программе и обеспечивают работу ГСУ поворота стойки в следящем режиме
по скорости исполнительных гидроцилиндров.
Коэффициенты усиления и обратных связей для ГСУ поворота
стойки.
|
1.
|
Коэффициент обратных связей по положению
пилотного золотника
|
В/м
|
25000
|
|
2.
|
Коэффициент усиления пилотного золотника
|
|
4
|
|
3.
|
Коэффициент обратных связей по положению
основного золотника
|
В/м
|
5000
|
|
4.
|
Коэффициент усиления основного золотника
|
|
4
|
|
5.
|
Коэффициент обратной связи по положению
гидроцилиндра
|
В/м
|
0
|
|
6.
|
Коэффициент усиления гидроцилиндра
|
|
1
|
|
7.
|
Коэффициент обратной связи по скорости
гидроцилиндра
|
В*с/м
|
10
|
|
8.
|
Коэффициент усиления по скорости
гидроцилиндра
|
|
26
|
После ввода всех необходимых
параметров необходимо щелкнуть на кнопке «ОК» внизу меню.
Для ввода конструктивных параметров
электромагнита необходимо щелкнуть на панели
«Параметры электромагнита» и ввести все необходимые параметры либо
оставить те, которые были предварительно введены.
Параметры электромагнита.
|
1.
|
Длина якоря магнита
|
м
|
0.05
|
|
2.
|
Постоянная электромагнита
|
Н*м/А
|
1.2
|
|
3.
|
Индуктивность обмотки управления магнита
|
Гн
|
0.06
|
|
4.
|
Активное сопротивление обмотки управления
|
Ом
|
300
|
|
5.
|
Воздушный зазор между якорем и сердечником
|
м
|
0.0002
|
Аналогичные действия необходимо
проделать и с остальными элементами, входящими в ГСУ, т.е. ввести параметры
пилотного золотника, основного золотника, гидроцилиндра.
Параметры пилотного
золотника.
|
1.
|
Диаметр пилотного золотника
|
м
|
0.006
|
|
2.
|
Масса пилотного золотника
|
кг
|
0.02
|
|
3.
|
Жесткость пружины
|
Н/м
|
40000
|
|
4.
|
Коэффициент полноты использования гильзы
|
|
0.3
|
|
5.
|
Максимальное смещение пилотного золотника
|
м
|
0.0004
|
|
6.
|
Коэффициент расхода
|
|
0.72
|
|
7.
|
Диаметр дросселя
|
м
|
0.0004
|
|
8.
|
Коэффициент расхода дросселя
|
|
0.72
|
Параметры основного
золотника.
|
1.
|
Диаметр основного золотника
|
м
|
16
|
|
2.
|
Масса основного золотника
|
кг
|
0.04
|
|
3.
|
Жесткость пружины
|
Н/м
|
50000
|
|
4.
|
Коэффициент полноты периметра гильзы
штоковой линии
|
|
0.4
|
|
5.
|
Коэффициент полноты гильзы поршневой линии
|
|
0.6
|
|
6.
|
Коэффициент расхода
|
|
0.72
|
|
7.
|
Максимальное смещение
|
м
|
0.002
|
Параметры гидроцилиндра
привода поворота стойки.
|
1.
|
Диаметр поршня
|
м
|
0.063
|
|
2.
|
Диаметр штока
|
м
|
0.032
|
|
3.
|
Приведенная масса гидроцилиндра
|
кг
|
70
|
|
4.
|
Жесткость нагрузки
|
Н/м
|
0
|
|
5.
|
Максимальный ход цилиндра
|
м
|
0.05
|
После ввода всех параметров необходимо
нажать кнопку «ОК» в окне «Параметры гидропривода поворота стойки». После чего
окно закроется и снова появится окно с названиями ГСУ всех степеней подвижности
ноги ШМ.
Коэффициенты
усиления и обратных связей для ГСУ
бедра.
|
1.
|
Коэф-т обратной связи по положению
пилотного золотника
|
В/м
|
25000
|
|
2.
|
Коэф-т усиления по положению пилотного
золотника
|
|
8
|
|
3.
|
Коэф-т обратной связи по положению
основного золотника
|
В/м
|
5000
|
|
4.
|
Коэффициент усиления основного золотника
|
|
8
|
|
5.
|
Коэффициент обратной связи по положению гц
|
В/м
|
0
|
|
6.
|
Коэффициент усиления по положению
гидроцилиндра
|
|
1
|
|
7.
|
Коэффициент обратной связи по скорости
гидроцилиндра
|
В*с/м
|
60
|
|
8.
|
Коэффициент усиления по скорости
гидроцилиндра
|
|
15
|
Коэффициенты обратных связей
и усиления для ГСУ голени.
|
1.
|
Коэф-т обратной связи по положению
пилотного золотника
|
В/м
|
25000
|
|
2.
|
Коэф-т усиления по положению пилотного
золотника
|
|
2
|
|
3.
|
Коэф-т обратной связи по положению
основного золотника
|
В/м
|
5000
|
|
4.
|
Коэф-т усиления по положению основного
золотника
|
|
4
|
|
5.
|
Коэф-т обратной связи по положению гидроцилиндра
|
В/м
|
0
|
|
6.
|
Коэф-т усиления по положению гидроцилиндра
|
|
1
|
|
7.
|
Коэф-т обратной связи по скорости
гидроцилиндра
|
В*с/м
|
28
|
|
8.
|
Коэф-т усиления по скорости гидроцилиндра
|
|
5
|
Параметры гидроцилиндра
привода бедра.
|
1.
|
Диаметр поршня
|
м
|
0.125
|
|
2.
|
Диаметр штока
|
м
|
0.07
|
|
3.
|
Приведенная масса гидроцилиндра
|
кг
|
70
|
|
4.
|
Жесткость нагрузки
|
Н/м
|
0
|
|
5.
|
Максимальный ход цилиндра
|
м
|
0.4
|
Параметры гидроцилиндра привода голени.
|
1.
|
Диаметр поршня
|
м
|
0.063
|
|
2.
|
Диаметр штока
|
м
|
0.032
|
|
3.
|
Приведенная масса гидроцилиндра
|
Кг
|
70
|
|
4.
|
Жесткость нагрузки
|
Н/м
|
0
|
|
5.
|
Максимальный ход цилиндра
|
м
|
0.05
|
Ввод параметров насоса с LS-управлением
осуществляется аналогичным образом, как и для ГСУ всех степеней подвижности
ноги.
Параметры регулируемого
насоса и элементов, входящих в него.
|
1.
|
Рабочий объём насоса
|

|
60
|
|
2.
|
Частота вращения вала насоса
|
об/мин
|
2500
|
|
3.
|
Приведенная масса цилиндров управления и
шайбы насоса
|
кг
|
2
|
|
4.
|
Радиус шайбы насоса
|
м
|
0.07
|
|
5.
|
Максимальный угол наклона шайбы насоса
|
град
|
17
|
Параметры
цилиндров управления.
|
1.
|
Диаметр цилиндра управления №1
|
м
|
0.01
|
|
2.
|
Диаметр цилиндра управления №2
|
м
|
0.025
|
|
3.
|
Жесткость пружины
|
Н/м
|
40000
|
|
4.
|
Сила поджатия пружины
|
Н
|
300
|
|
7.
|
Коэффициент расхода дросселя
|
|
0.7
|
|
8.
|
Зазор в цилиндре управления №2
|
м
|
0.00004
|
|
9.
|
Коэффициент расхода канала
|
|
0.6
|
Параметры LS-золотника.
|
1.
|
Диаметр золотника
|
М
|
0.01
|
|
2.
|
Масса LS-золотника
|
Кг
|
0.03
|
|
3.
|
Максимальное смещение золотника
|
Н
|
0.002
|
|
4.
|
Жесткость пружины
|
Н/м
|
70000
|
|
5.
|
Сила поджатия пружины
|
Н
|
50
|
|
6.
|
Коэффициент расхода
|
|
0.72
|
|
7.
|
Коэффициент полноты гильзы золотника
|
|
0.4
|
Параметры
ОГД-золотника.
|
1.
|
Диаметр золотника
|
м
|
0.007
|
|
2.
|
Масса
золотника
|
кг
|
0.03
|
|
3.
|
Максимальное смещение
|
м
|
0.001
|
|
4.
|
Жесткость пружины
|
Н/м
|
120000
|
|
5.
|
Сила поджатия пружины
|
Н
|
2200
|
|
6.
|
Коэффициент расхода
|
|
0.72
|
|
7.
|
Коэффициент полноты гильзы золотника
|
|
0.3
|
После ввода параметров всех
элементов, входящих в ГСУ ноги необходимо ввести параметры интегрирования:
метод интегрирования, метод Мерсона, тип входного сигнала – «Реальный»,
параметры нагрузки – выбираем пункт «Расчетная», значения коэффициентов
для каждого привода оставляем равными 1, в меню ввод начальных условий,
вводятся интервал времени, на котором будет проводится моделирование (Т0=0,
Тк=3.66) и начальные значения для всех переменных. Для перемещений гидроцилиндров
введены значения соответствующие началу фазы опоры.
После ввода начальных условий
необходимо задать количество насосов –
один насос и тип гидроцилиндра – одноштоковые.
На этом ввод параметров
элементов ГСУ одной ноги закончен.
Нажатием кнопки «Исполнение»
программа запускается на счёт.
После того как программный
комплекс закончит вычисление на экране появится окно для вывода результатов
моделирования рис.11.
Для получения
графика скорости исполнительного гидроцилиндра ГСУ поворота стойки необходимо
щелкнуть на меню с названием привода и в появившемся меню щелкнуть на строке «Скорость
исполнительного гидроцилиндра» (рис.12). Для того чтобы получить
графики других величин необходимо нажать кнопку «Очистить», а затем повторить
действия, описанные выше. На рис.13, 14
приведены графики скоростей исполнительных гидроцилиндров ГСУ бедра и
голени. На рис.15 приведен график к.п.д. ГСУ, одной ноги ШМ.
Таким образом,
разработанный программный комплекс позволяет получить графики, необходимые для
оценки динамических и энергетических
характеристик ГСУ ШМ при различных
режимах движения.
Список литературы:
1.
Borovin G.K. Computer Simulation of Hydraulic Control
System of the Walking Machine. Proceedings 2nd Tampere Intern. Conf.
on Machine Automat, ICMA'98, p.p. 179-192.
2.
Боровин Г.К. Математическое моделирование гидравлической системы
управления шагающей машины: Препринт ИПМ РАН им. М.В.Келдыша №106, М., 1995г. 28с.
3.
Боровин Г.К., Костюк А.В. Математические модели гидравлического привода
с LS-управлением
шагающей машины: Препринт ИПМ РАН им. М.В.Келдыша №56, М., 2000г. 28с.
4.
Боровин Г.К., Костюк А.В. Математическое моделирование гидравлического
привода с LS-управлением шагающей машины: Препринт ИПМ РАН им.
М.В.Келдыша №54, М., 2001г. 28с.
5.
Боровин Г.К., Костюк А.В. Шагающие машины. // Тезисы докл. Научно-техн.
конф. "Гидромашины, гидроприводы и гидропневмо-автоматика", М: МГТУ
им. Н.Э.Баумана, декабрь 1999г., с.с. 7-8.
6.
Боровин Г.К., Костюк А.В. Математическое моделирование систем
управления шагающих машин. // Тезисы докл. Научно-техн. конф.
"Гидромашины, гидроприводы и гидропневмоавтоматика", М: МГТУ им.
Н.Э.Баумана, 1999г. с.с. 8-9.
7.
Боровин Г.К., Костюк А.В. Математическое моделирование гидросистемы
шагающей машины. // Материалы 11-ой Научно-технической конференции
«Экстремальная робототехника», С-Петербург: Изд-во СПбГТУ, 2001г. с.с. 96-106.
8.
Боровин Г.К., Костюк А.В. Математическое моделирование гидравлической
системы управления шагающей машины. // Труды научной школы-конференции
«Мобильные роботы и мехатронные системы», Москва, МГУ, декабрь 2001г., 15с.
9.
Боровин Г.К., Костюк А.В. Математическое моделирование
гидравлической системы управления шагающей машины. // Теория и системы
управления. 2002г., №4.
10. Боровин Г.К., Костюк
А.В. Моделирование динамики гидропривода ноги шагающей машины: Препринт ИПМ РАН
им.М.В.Келдыша №8, М., 2002г. 28с.
11. Костюк А.В.
Моделирование гидравлической системы управления шагающей машины. //Диссертация
на соискание учёной степени кандидата физико-математических наук. Москва 2002г.
156с.
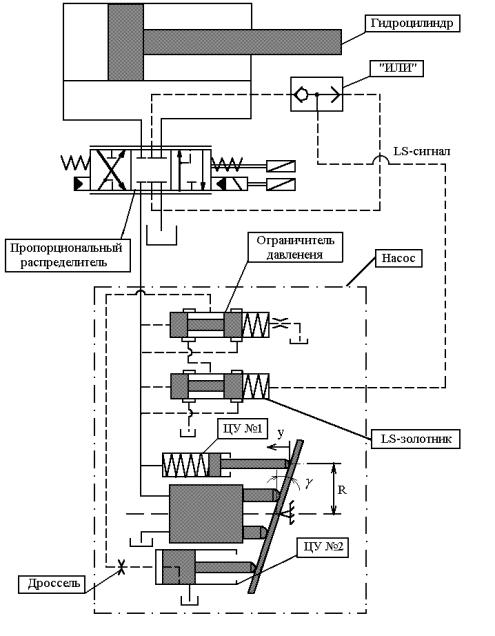
Рис.1.
Принципиальная гидросхема одной степени подвижности ноги ШМ.
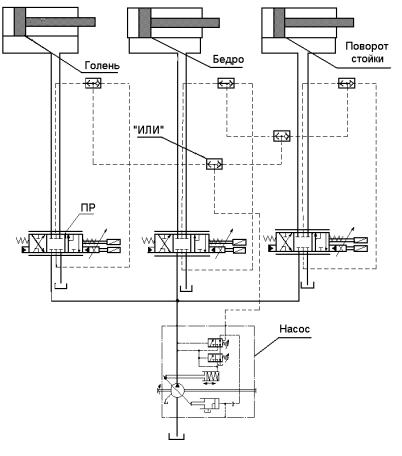
Рис.2.
Гидравлическая схема одной ноги ШМ.
Рис.3. Структурная схема
программного комплекса.
Рис.4.
Окно программного комплекса.

Рис.5. Окно ввода
параметров рабочей жидкости и вызова подменю всех элементов ГСУ.
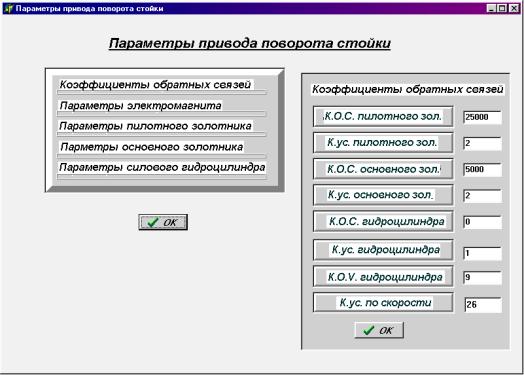
Рис.6. Окно ввода коэффициентов обратных связей ГСУ поворота стойки.
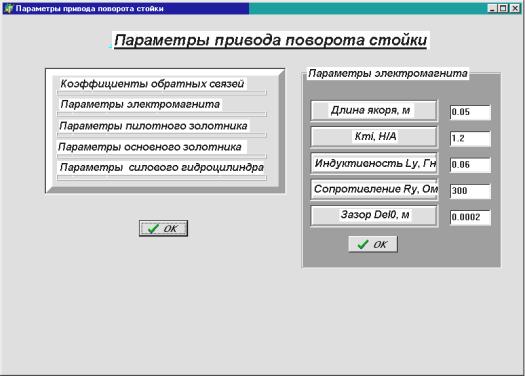
Рис.7. Меню ввода
параметров электромагнита привода поворота стойки.
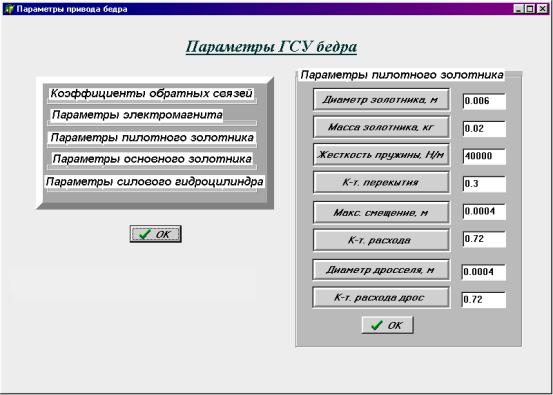
Рис.8.
Окно ввода параметров ГСУ бедра.
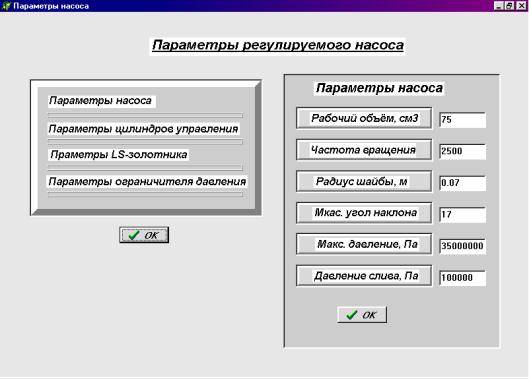
Рис.9.
Окно ввода параметров насоса.
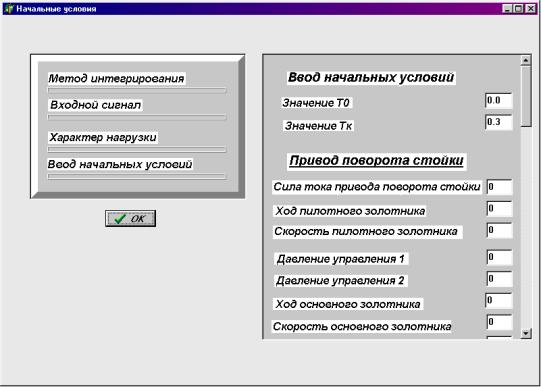
Рис.10.
Окно ввода начальных условий.
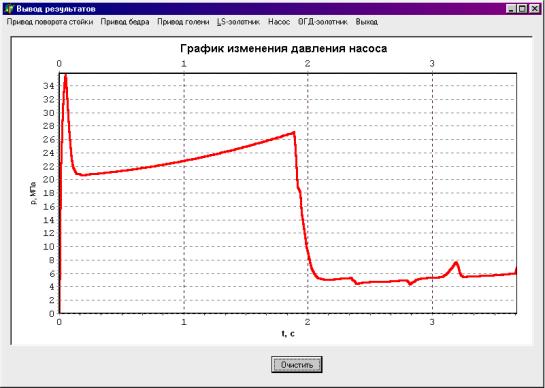
Рис.11.
График изменения давления.
Рис.12.
Скорость исполнительного гидроцилиндра ГСУ поворота стойки.
Рис.13.
Скорость исполнительного гидроцилиндра ГСУ бедра.
Рис.14.
Скорость исполнительного гидроцилиндра ГСУ голени.
Рис.15.
График к.п.д. ГСУ.
|