Аннотация
В работе рассматривается проблема построения системы спутников на стационарных орбитах с целью
обеспечения устойчивой связи Российской Федерации с заданными регионами Земли. В связи с этим
формулируется достаточно общая баллистическая задача. Подробно излагается разработанная
методология решения этой задачи в детерминированной постановке. Приводятся результаты решения
задачи выбора положения спутников на стационарной орбите для обеспечения связи с Южной
Америкой, Австралией и Океанией.
Abstract
Problem to set up network of satellites placed on stationary orbits is described. It is
established to provide reliable communication of Russian Federation to given Earth’s
regions. Problem in general ballistic statement is formulated. Methodology of its
solution in deterministic statement is considered in details. Particular results of
calculated satellites positioning on stationary orbits to provide communication to
South America, Australia and Oceania are given.
СОДЕРЖАНИЕ.......................................................................................................... 3
Введение...................................................................................................................... 4
1. Постановка задачи................................................................................................. 5
2. Методология
решения задачи.............................................................................. 7
3. Методика расчета
линий уровня видимости.................................................... 10
4. Выбор положения
спутников на стационарной орбите для обеспечения связи с Южной Америкой,
Австралией и Океанией............................................................................................ 19
Заключение............................................................................................................... 21
Литература................................................................................................................. 22
Рисунки...................................................................................................................... 23
Выбор
минимального числа спутников и их положения на стационарной орбите для
реализации связи Российской Федерации с заданными регионами Земли является
сложной комплексной многопараметрической проблемой. В настоящем отчете
представлены баллистические аспекты этой проблемы.
На
основе имеющегося опыта баллистико-навигационного обеспечения проектирования,
реализации и анализа полетов спутников сформулирована достаточно общая
баллистическая задача выбора системы спутников на стационарной орбите.
В
препринте излагается разработанная методология решения указанной баллистической
задачи в детерминированной постановке. Основное требование при разработке
методологии – она должна позволять быстро и надежно, с минимумом расчетов,
находить результаты решения выбора системы спутников для тех или иных заданных
регионов Земли и для широкого спектра вновь появляющихся (или исчезающих)
баллистических ограничений.
Решена
задача выбора системы спутников на стационарной орбите с минимизацией числа
спутников в системе для обеспечения связи с территории Российской Федерации со
странами Южной Америки, с Австралией и, по возможности, с регионами Океании,
при определенных, оправдываемых практикой, ограничениях по условиям видимости
(спутников).
В общем
виде проблема заключается в построении системы спутников на стационарной орбите
(стационарных спутников) с целью обеспечения устойчивой связи Российской
Федерации с заданными регионами Земли через указанные спутники.
Проблема
носит комплексный характер. При ее решении наряду с баллистическими вопросами
следует рассматривать вопросы организации связи, навигации, управления
движением спутников системы и др. Она должна решаться, и это главное, так,
чтобы по возможности минимизировать объемы финансирования на реализацию и
эксплуатацию системы стационарных спутников.
С учетом
сказанного проблема выбора системы стационарных спутников сводится к решению
следующей основной баллистической задачи.
Задача
0.
Найти систему из минимального числа стационарных спутников, которая
обеспечивает устойчивую связь Российской Федерации с заданными регионами Земли
при ограничениях:
а)
навигация и управление полетом спутников системы обеспечивается наземными
измерительными пунктами (НИП), которыми располагает РФ;
б)
пункты связи (приема и передачи информации) со стороны России (ПСР) должны
располагаться на ее территории как можно более компактно (желательно в одном
месте);
в) из
пунктов (точек) заданных регионов Земли хотя бы один стационарный спутник
"виден" над плоскостью горизонта под углом (углом места),
превосходящим заданное значение.
При
выполнении ограничения а) не требуется тратить средства на строительство новых
НИП'ов или обращаться к другим государствам для подключения (на коммерческой
основе) к работе с системой стационарных спутников принадлежащих им НИП'ов.
Ограничение
б) обусловлено минимизацией числа наземных информационных линий от российского
абонента к пунктам связи со спутниками, что напрямую коррелирует с уменьшением
затрат на прокладку указанных информационных линий. Ограничение в) вытекает
напрямую их требования возможности организации связи со спутником системы с
любого наземного пункта заданного региона Земли.
Вообще
говоря, задачу 0 целесообразно решать в так называемой стохастической
постановке, когда допускается некоторое отклонение положения спутника системы
от номинального положения, не нарушающее условия задачи. Чем больше эти
допустимые отклонения, тем реже необходимо проводить дорогостоящие операции
маневрирования спутника. Отметим, что указанные отклонения спутника обусловлены
[1] неточностью знания сил, действующих на спутник, а при установке спутника в
выбранное номинальное положение они напрямую являются следствием ошибок
исполнения маневрирования, в том числе - ошибок выведения его с поверхности
Земли на орбиту.
На первом
этапе задача 0 решается в так называемой детерминированной постановке, когда
предполагается, что каждый спутник системы удерживается на стационарной орбите
в выбранном положении путем регулярного уточнения параметров его орбиты по
траекторным измерениям и последующего маневрирования. Затем решается задача в
стохастической остановке для уточнения полученного (на первом) решения задачи в
детерминированной постановке.
В
настоящей работе достаточно подробно
рассматривается методология решения основной задачи в детерминированной
постановке.
При
решении задачи предполагается, что фигура Земли является двухосным эллипсоидом
(эллипсоидом вращения) с заданными полуосями a и b и Земля вращается
вокруг малой оси b равномерно с известной угловой скоростью w. Заметим, что указанные
модели фигуры Земли и ее вращения достаточно адекватны реальной фигуре Земли и
закону ее вращения [2] и они вполне могут применяться на стадии проектирования
системы спутников.
В
пределах точной модели Земли стационарной орбитой является круговая
экваториальная орбита с радиусом r, обеспечивающим синхронное
с вращением Земли угловое перемещение спутника по орбите. Все стационарные
спутники находятся на одной и той же орбите, а местоположение конкретного стационарного
спутника задается географической широтой l спутника. Очевидно,
что географическая широта j любого
стационарного спутника равна нулю. Поэтому, результатом решения задачи 0,
является выбор долгот l1,…,lN стационарных спутников,
образующих искомую систему.
Для
изложения материала вводятся следующие понятия. Угол места (g) спутника относительно
точки на поверхности Земли - угол между направлением из точки на спутник и
плоскостью местного горизонта в этой точке. Угол g отсчитывается от плоскости
и является положительным, если спутник выше местного горизонта, а
следовательно, виден из точки, и является отрицательным, если спутник ниже
местного горизонта.
Линия
уровня видимости - геометрического место точек на поверхности Земли, для каждой
из которых угол места спутника равен фиксированному значению g, g³0.
Принятая
для расчетов фигура Земли, является симметричной относительно экватора и любой
плоскости, содержащей малую полуось. Следовательно, линии уровня видимости как
геометрические фигуры не зависят от положения спутника на стационарной орбите.
Поэтому, для того чтобы получать линии уровня видимости на определенной
географической карте для любого положения l спутника на стационарной
орбите, достаточно рассчитать и построить в масштабе этой карты линии уровня
для какого-то одного любого значения l. Получаем некоторый
шаблон линий уровня. Центром шаблона называется точка, в которую вырождается
линия уровня видимости при g=900. На
шаблон наносится также образ линии экватора Земли. Центр шаблона соответствует
положению спутника на орбите.
Если
построить шаблоны линий уровня видимости с достаточно мелким шагом по g, 00£g£900, то процесс
решения задачи 0 с участием человека сводится к перемещению, по соответствующей
карте одинаковых шаблонов и становится простой процедурой, а результат решения
наглядным. Каждый из шаблонов должен перемещаться так, чтобы центр его
находился на экваторе, а образ линии экватора на нем располагался по линии
экватора на карте.
В начале
пытаются решить задачу с помощью одного шаблона, (один спутник). Если решения
нет, то оперируют двумя шаблонами (два спутника) и т.д. Для практически
интересных задач, как правило, достаточно не более трех шаблонов (три
спутника).
Таким
образом, решение задачи сведено к выбору карты и построению соответствующего
шаблона линий уровня видимости.
Следует обратить особое внимание, что
сформулированная задача выбора системы стационарных спутников, как правило, не
имеет однозначного решения, и/или для выбора определенного решения необходимо
руководствоваться дополнительными соображениями (ограничениями). Например,
долгота стационарного спутника в соответствии с международными соглашениями
должна находиться в определенных диапазонах, или пункт связи обязательно должен
находиться в определенной точке на поверхности Земли и т.д. Предложенная
методология позволяет легко учесть эти соображения.
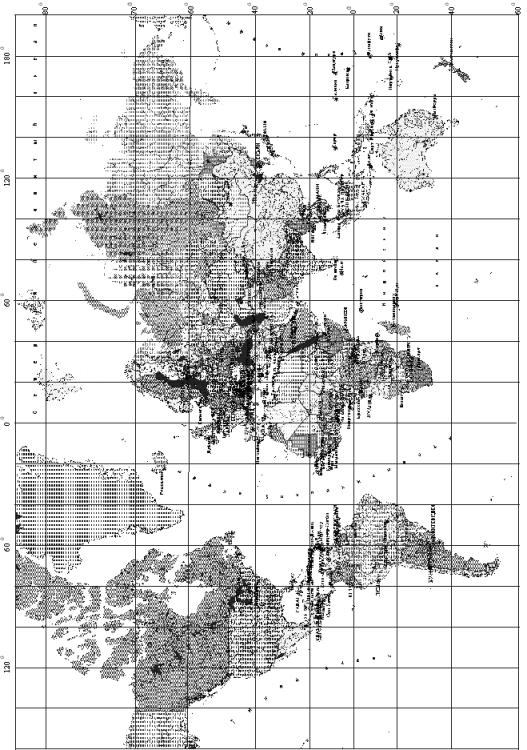
Для
практического использования удобно выбрать карту Земли в цилиндрической
проекции, в которой параллели - параллельные прямые, расстояния которых от
изображения начального меридиана пропорциональны их долготам. На рис.1
представлена такая карта, которая пренебрежимо мало отличается от карты в
проекции Меркатора [3]. На карте нами нанесены параллели и меридианы. За основу
при создании карты была взята политическая карта WM-10/96, проекция
Меркатор Центра РОСГЕОИНФОРМ Федеральной службы Геодезии и Картографии России.
После
расчета линий уровня видимости для углов места g в диапазоне от 00
до 900 с шагом 100, построен шаблон, соответствующий
карте, представленной на рис.1. Для удобства пользователя шаблон отображается
на прозрачный лист (прозрачку). Экземпляр такого шаблона для решения задачи 0
изображен на рис. 5.
Кроме
упомянутых расчетов, для построения шаблонов дополнительно выполнены расчеты
дальности d от спутника до точек линии уровня видимости для
каждого из указанных выше углов g. Эти расчеты представлены в виде графиков
зависимостей d(j) на рисунках: на
рис.2 - для g=00, 100.
На рис. 3 для g=200, 300
и на рис.4 для g=400, 500.
Заметим,
что функции d(j) для каждого фиксированного
угла места g не изменяется от
местоположения спутника на стационарной орбите (не зависит от l).
Методика
расчета линий уровня видимости и зависимостей d(j) представлены в
следующем разделе. Заметим, что она может использоваться не только для спутника
на стационарной орбите, но и для случая, когда спутник отклоняется от своей
стационарной орбиты.
Результаты расчетов и соответствующие
им шаблоны и графики получены по исходным данным, которые используются на
практике в баллистических расчетах:
a=6378.137
км,
b=6356.755
км,
w=0.7292115085 1/c,
гравитационная постоянная Земли m=398600,448 км3/с2.
Радиус круговой орбиты стационарного спутника рассчитывался по известной в
небесной механике формуле [4]:
r=(m/w2)1/3=42164.1728
км.
В
настоящей разделе описывается методика расчета линий уровня видимости для
спутника P, который может находиться не обязательно в
экваториальной плоскости Земли. Поэтому, она может использоваться при решении
задачи 0 в детерминированной постановке, когда спутник лежит в экваториальной
плоскости, и при ее решении в стохастической постановке, когда спутник может
выходить из экваториальной плоскости.
Линия
уровня видимости для любого фиксированного угла места g как геометрическая фигура не
зависит от долготы l спутника и, не
нарушая общности, можно полагать, что долгота спутника всегда равна нулю. При
этом долготу любой другой точки будем обозначать через dl и называть относительной
долготой. Положение спутника можно задавать двумя параметрами: расстоянием r от центра Земли и
так называемым центральным углом uÎ(-p, p] между
направлениями из цента Земли на спутник и на точку с координатами j=0, dl=0. Угол отсчитывается от
последнего направления, и является положительным, если спутник находится в
северном полупространстве Земли.
Линия уровня видимости для
заданного угла места g и заданного
положения спутника находится в три этапа. На первом этапе определяется диапазон
широт j точек на
поверхности Земли, которому принадлежат широты искомого множества точек. На
втором этапе указанный диапазон широт "просматривается" от левой до
правой его границы с малым шагом, не превосходящим заданного, и для крайних
точек каждого шага определяются такие значения dl, что бы точки (j, dl) принадлежали указанной линии
уровня. Кроме того, на этом этапе для каждой найденной точки рассчитывается ее
дальность d от спутника. На третьем этапе по найденным точкам
строится искомая линия уровня, которая отображается в случае необходимости на
карту Земли и/или прозрачку (для шаблона).
Третий
этап реализуется на компьютере широко распространенными и известными
общесистемными средствами. Поэтому ограничимся рассмотрением только первых двух
этапов.
Первый и
второй этапы построения линии уровня видимости непосредственно сводятся к
решению двух задач 1, 2, соответственно.
Задача
1.
Найти точки на эллипсе, с которой заданная точка в плоскости эллипса (вне
эллипса) "видна" под заданным углом, а также проекцию этой заданной
точки на эллипс и ее высоту над эллипсом.
Задача
2. Найти на эллипсоиде вращения точки с
фиксированной широтой, с которых заданная точка эллипсоида "видна"
под заданным углом.
Ниже
приводятся методики решения задач 1, 2 и вспомогательной задачи 3, результаты
решения которой используются при решении первых двух задач. Вспомогательная
задача формулируется следующим образом.
Задача
3.
Найти единичный вектор e, который
ортогонален к эллипсу в заданной центральным углом u точке эллипса и
направлен из эллипса.
Описание
методики решения каждой задачи начинается ее точной математической
формулировкой.
Методика
решения задачи 1.
Эллипс
задается своими полуосями a и b. Положение рассматриваемых точек определяется в
системе координат (СК) OYZ. Центр системы (точка O) находится в
геометрическом центре эллипса, а ее оси направлены по главным осям эллипса.
Предполагается, что большая полуось эллипса имеет длину a и она лежит на оси OY СК. Положение любой
точки эллипса определяется центральным углом u и расстоянием r от центра O СК (центральным
расстоянием). Центральный угол образуется направлениями из центра эллипса
(точка O) на точку и направлением оси OY. Он отсчитывается
от оси OY, uÎ(-p, p]. Знак угла u совпадает со
знаком второй компоненты вектора положения точки в СК OYZ.
Заданная
вне эллипса точка P(yp, zp) определяется центральным
углом up и центральным расстоянием rp. Ввиду симметрии
эллипса можно, не нарушая общности, положить, что upÎ[-p/2, p/2].
Пусть e=(ey, ez) - единичный
вектор, направленный вне эллипса и перпендикулярный касательной к эллипсу в
некоторой точке T(y, z) эллипса. Тогда угол j между вектором e и осью OY называется широтой точки T, а также - широтой
любой точки прямой, проходящей через точку T коллинеарно вектору e. Точка T называется проекцией любой
точки S на указанной прямой. Расстояние d0 между точками T и S называется высотой
точки S над эллипсом.
Требуется
найти:
-
проекцию T0(y0,z0), широту j0, высоту d0 заданной точки P и центральный угол
этой проекции;
- две
такие точки эллипса T1(y1,z1) и T2(y2,z2)
"видимые" из заданной точки P, для каждой из которых касательная к
эллипсу составляет угол равный заданному значению g с направлением на точку P,
и - величины ji, ui, di
(i=1,2), где ji, ui - соответственно, широта и центральный угол
точки Ti, а di - дальность заданной точки P от точки Ti.
Заметим,
что точкой "видимой" с точки P вне эллипса называется
такая точка T, для которой отрезок прямой между точками T и P не содержит
внутренних точек конечной области, ограниченной эллипсом.
Вычисление
координат точек T0, T1, T2 и других искомых параметров
сводится к вычислению "нулей" u0, u1, u2 двух функций:
f0(u) = -(yp - yT(u)) ez(u)
+ (zp - zT(u)) ey(u),
f1(u) = (yp - yT(u)) ey(u) +
(zp - zT(u)) ez(u) - d(u) sin g,
где yp,
zp - координаты точки P, yp = rp
cos up, zp = rp sin up, a
d(u)
= ((yp - yT(u))2 + (zp - zT(u))2)1/2.
Величины
yT, zT, ey, ez для точки T на эллипсе ,
определяемой углом u вычисляются путем решения задачи 3.
"Нулем" функции f(u) называется некоторое значение u* переменой u, для которой
выполняется равенство f(u*) = 0. Величина f0 есть косинус угла
между направлением из точки T эллипса на точку P и касательной к
эллипсу в точке T, а f1 - величина пропорциональная разности
косинусов двух углов, один из которых - угол между направлениями из точки T на
точку P и нормалью к эллипсу (в точке T), а другой - угол,
равный p/2-g.
Каждая
из указанных выше функций имеет несколько "нулей".
Искомым
значением угла u0 является "нуль" функции f0(u) ближайший к
центральному углу up точки P. Поэтому, поиск u0 осуществляется
путем просмотра значений функции f0(u) с шагом h по аргументу, не
превышающим (по абсолютной величине) заданного значения, начиная от u=up.
Искомыми
значениями углов u1, u2 являются "нули" функции f1(u) ближайшие к u0. Причем, они должны
удовлетворять условиям u1£u0, u2³u0.
Поиск u1
осуществляется путем вычисления значений функции f1(u) с отрицательным
шагом длинной h по ее аргументу, начиная от u=u0, до тех пор, пока
функция не сменит знак. после определения интервала длиной h, которому
принадлежит искомый " нуль" u1 функции, на нем вычисляется
значение этого "нуля" путем применения метода секущих [5].
Аналогично,
но с положительным значением шага длинной h, начиная от того же
значения u=u0 вычисляется значение u2.
После
завершения вычисления центральных углов ui (i=0,1,2), по
известным координатам точек Ti(yTi, zTi) и компонентам
единичных векторов e(ui) рассчитываются все
остальные величины:
- j = arcsin (ey(ui))
- di(u) = ((yp - yTi)2 + (zp
- zTi)2)1/2.
Методика
решения задачи 2.
Эллипсоид
вращения определяется своими полуосями a и b. Предполагается,
что он получается в результате вращения эллипса с полуосями a и b (длины
полуосей равны, соответственно, a и b) вокруг оси b.
Вводится
в рассмотрение прямоугольная СК OXYZ, определяемая заданной
точкой P в пространстве. Центр СК находится в геометрическом
центре эллипсоида, ось OZ направлена по полуоси b, ось OY направлена так, что
точка P лежит в плоскости OYZ и направление на
нее (из точки O) составляет острый угол с осью OY. Ось OX дополняет систему
до правой.
Кроме
того, вводится сферическая СК, в которой положение любой точки определятся
сферическими координатами r, u, dl: r - центральное
расстояние до точки, u - угол между направлением на точку из точки О с
плоскостью OXY (центральный угол), а dl - угол поворота плоскости OYZ вокруг оси OZ до положения, когда
в нее попадает точка (относительная долгота). Угол u отсчитывается от
плоскости OXY, u>0 для точки с аппликатой большей нуля и u<0 для точки с
отрицательной аппликатой, uÎ (-p/2, p/2). Угол dl принадлежит полуотрезку (-p,p] и является положительным,
когда указанный поворот плоскости производится против часовой стрелки, если
смотреть вдоль отрицательного направления оси OZ.
Для
заданной точки P(rp, up, 0) вне эллипсоида
требуется найти точку T с заданным центральным углом u, с которой точка P является
"видимой" под заданным углом g (углом видимости)
относительно касательной плоскости к эллипсоиду (в точке T), 0 £ g £ p/2. Заметим, что точка P вне эллипсоида
называется видимой из точки T на эллипсоиде, если отрезок прямой между точками T и P не содержит
внутренних точек эллипсоида.
Ввиду
симметрии эллипсоида относительно плоскости OYZ данным условиям, как
правило, отвечают две точки, причем, их относительные долготы отличаются только
знаком. поэтому, не нарушая общности, находится только точка T, для которой
относительная долгота неотрицательна.
Наряду с
вычислением сферических координат r и dl точки T требуется
рассчитать ее прямоугольные координаты
(x,
y,
z),
широту j, дальность d от точки P. Широтой j точки называется угол между
единичным вектором e перпендикулярным к
касательной плоскости (к эллипсоиду) в этой точке и плоскостью OXY. Отсчет широты
идентичен отчету угла u. Для одной и той же точки знак угла j совпадает со знаком угла u и изменяется в тех
же пределах, что и угол u. При u=0 угол j=0. С увеличением
(уменьшением) угла u увеличивается (уменьшается) угол j.
Таким
образом, по заданным a, b, rp, up, u, g требуется найти j, dl, x, y, z.
Пусть OX1Y1Z1 так называемая
повернутая СК, в которую переходит СК OXYZ после ее поворота вокруг оси
OZ
на угол dl. Если V - любой вектор (строка) в СК OXYZ, то тот же вектор в
СК OX1Y1Z1, обозначаемый через V1 равен V1T=A VT. Матрица A называется матрицей
перехода из СК OXYZ в СК OX1Y1Z1 и равна
 . .
Любой
фиксированной точке T на поверхности эллипсоида со сферической
координатой dl соответствует СК OX1Y1Z1. Плоскость OX1Y1 рассекает
поверхность эллипсоида по эллипсу (эллипсу сечения). Единичный вектор нормали к
эллипсоиду в рассматриваемой точке T совпадает с единичным
вектором ортогональным соответствующему эллипсу сечения и лежащим в плоскости
сечения. Вектор нормали к эллипсоиду e1 = (0, ey1, ez1) и координаты y1, z1 точки T в СК OX1Y1Z1 являются функциями
угла u
и для фиксированного угла u, что имеет место в нашем случае, вычисляется путем
решения задачи 3. Вектор положения заданной точки P в СК OXYZ равен P=(хp, yp, zp) = (0, rp cos up, rp sin up), а его образ в СК OX1Y1Z1 равен P1T = APT`= (хp1, yp1, zp1)T=(ypsindl, ypcosdl, zp)T, и, следовательно,
угол видимости определяется соотношением:
sinl = e1 TP/|TP|, (*)
где TP - вектор в СК OX1Y1Z1 с началом
в точке T и концом в точке P, TP=(xp1(dl), yp1(dl)-y1, zp1-z1).
Так как
в нашем случае величина g задана, то значение
dl для искомой точки T находится путем
решения уравнения (*).
После
вычисления dl, рассчитывается
матрица A и, затем, вычисляются координаты искомой точки T в СК OXYZ. По известным в СК OXYZ координатам точек P и T определяется
величина d=|TP|.
Чтобы
получить удобное соотношение для расчета величины dl, выражение (*)
записывается в развернутом виде:
 . .
Последнее
соотношение рассматривается как уравнение относительно величины c=cosdl. Если решение этого
уравнения существует, то искомым является значение dl=arccos c.
Путем
возведения левой и правой частей уравнения в квадрат и освобождения от
знаменателя в левой части оно преобразуется в квадратное уравнение относительно
cosdl.
A2 cos2dl - 2 A1 cos dl -A0
=0. (**)
Заметим,
что последнее уравнение может иметь лишний корень по сравнению с исходным
уравнением (*).
После
несложных преобразований имеют место формулы для расчета коэффициентов
уравнения:
A0
= (zp - z1) ez1 (2 y1 ey1
- (zp - z1) ez1) + (rp2
+ y12 + z12 - 2zpz1)
sin2g - y12
ey12
A1
= yp (y1 (ey12 - sin2g) -
(zp - z1)ey1 ez1),
A2
= yp2 ey12.
Квадратное
уравнение может не иметь решений (дискриминант отрицательный). Оно может иметь
одно или два решения (дискриминант больше или равен нулю). Из двух корней
искомым является тот, который удовлетворяет исходному соотношению (*).
В
заключении следует отметить, что, если |up| стремится к p/2, то и A1, и A2 стремятся к нулю,
т.е. уравнение (**) вырождается. Поэтому, предполагается использовать настоящую
методику при выполнении необременительного ограничения на центральную широту
точки P, а именно, -p/2+e £ up £ p/2-e. Здесь e>0 - малая положительная
величина.
Методика
решения задачи 3
Эллипс
задается своими полуосями a и b. Точно также, как и в задаче 1 см. "Методику
решения задачи 1") вводится СК OYZ, связанная с эллипсом, и
понятия центрального угла u и широты j, для точки T на эллипсе.
Координаты точки T на эллипсе здесь обозначаются через yT, zT, а компоненты
единичного вектора e, который
ортогонален к эллипсу в точке T – через ey, ez.
Задача
заключается в определении, при заданных значениях a, b, u, координат точки T и компонентов
вектора e. Заметим, что
компоненты этого вектора определяют широту j, так как ey = cos j, ez = sin j.
Пусть rT
- расстояние точки T от центра эллипса (точки 0). Тогда уравнение
касательной к эллипсу в точку T записывается в виде
y rT cos u /a2 + z rT sin u / b2
= 1
или в виде
z=-y ctg u b2/a2 + a2/(rT
cos u).
Отсюда
следует, что для любой точки T имеют место следующее соотношение между широтой и
центральным углом:
tg j =
tg u a2 / b2.
Центральное
расстояние точки T в зависимости от ее центрального угла определяется из
условия, что эта точка принадлежит эллипсу, т.е. имеет место соотношение
rT2 cos2u /a2 + rT2
sin2u / b2 = 1.
Из этого соотношения следует
rT(u) = a b / (a2 sin2u + b2
cos2u)1/2.
Воспользовавшись
последним соотношением и представленным выше соотношением между тангенсами
широты и центрального угла, после элементарных преобразований получаем
соотношения для расчета искомых величин:
ey = q b2 cos u, ez = q a2 sin u,
yT = rT cos u, zT = rT sin u.
Здесь q = (a4 sin2u + b4 cos2u)-1/2, а
центральный радиус rT рассчитывается по
приведенной выше формуле.
Для
решения задач 1, 2, 3 были разработаны на FORTRAN'е соответствующие программы
1, 2, 3. Программы для выполнения расчетов на первом и втором этапах определения
точек линий уровня видимости легко компилируются их указанных программ: для
первого этапа - из программ 1, 3, для второго этапа - из программ 2, 3.
В настоящем разделе излагаются
результаты решения целевой задачи выбора местоположения системы стационарных
спутников, обеспечивающих связь Российской Федерации со странами Южной Америки,
с Австралией и, по возможности, с регионами Океании.
Указанная
задача решалась как задача 0 в детерминированной постановке (см. раздел 1), в
которой заданными регионами Земли являлись Южная Америка и Австралия, а
наиболее широкий охват связью через спутники системы регионов Океании
рассматривался как дополнительное требование к решению задачи.
Были
постулированы следующие практически обоснованные положения.
1) Из
располагаемых Россией НИП'ов, которые по радиотехническим параметрам способны
работать со стационарными спутниками, по крайней мере, два НИП'а могут быть
задействованы в работе с каждым спутником системы с целью получения траекторной
измерительной информации для навигации, и один НИП - для управления полетом
спутника. Последний НИП может совпадать с одним из первых НИП'ов.
2) НИП
может работать со спутником, если угол места спутника в точке расположения
НИП'а не менее заданной величины gНИП.
3) Пункт
связи со стороны России может принимать со спутника или передавать на спутник
информацию, если угол места спутника в точке этого пункта больше или равен
заданной величины gПСР.
Кроме
того, предполагалось, что для пункта приема/передачи информации в регионе (в
региональном пункте) единственным ограничением для работы со спутником является
ограничение снизу на угол места спутника в точке расположения этого пункта.
Нижняя граница указанного угла места обозначается через gРП.
Опыт
работы по баллистико-навигационному обеспечению полета космических аппаратов
(см., например, [4]) показывает, что НИП'ы, которыми располагает РФ,
обеспечивают уверенную связь со спутником и получают качественную траекторную
информацию, в том числе в режиме когерента, если gНИП=70.
Исходя из этого, задача о выборе местоположения искомой системы спутников
решалась в предположении, что gПСР=gРП=gНИП=70.
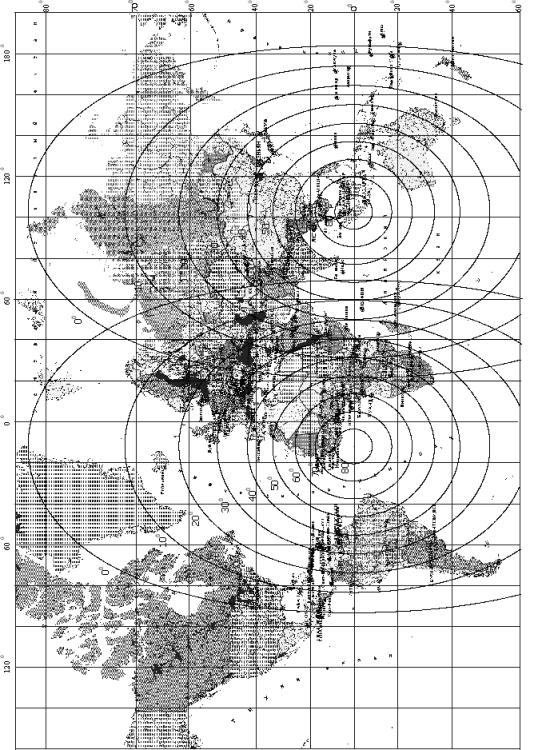
Решение
задачи осуществлено по методике, изложенной в разделах 2 и 3. Основной
результат решения заключается в том, что для обеспечения связи РФ с указанными
регионами необходимо, как минимум, два стационарных спутника. Приемлемыми и
близкими к оптимальной паре точек расположения этих двух стационарных спутников
являются точки с географическими долготами, равными 12,00З.д. и
102,70В.д.
Линии
уровня видимости с шагом 100 по углу места для обоих спутников
приведены на рис.6. Они дают полное представление о результатах решения задачи.
Укажем некоторые их них.
1) К
работе со стационарными спутниками могут по своим параметрам (по дальности до
спутника и по его углу места) привлекаться НИП'ы, расположенные в окрестности
городов Евпатория, Щелково МО (для западного спутника) и Евпатория, Уссурийск (для
восточного спутника).
2) Можно
обойтись одним пунктом связи со стороны России, который можно расположить в
низовьях Волги и регионах России, прилегающих к Северному Кавказу. Из любой
точки этих регионов РФ каждый из стационарных спутников виден под углом места,
превышающим 100. Наиболее подходящая точка (с точки зрения видимости
спутников) находится на Северном Кавказе, для которой углы места обоих
спутников около 150.
3)
Система спутников может обеспечить связь РФ не только с Южной Америкой и
Австралией, но и с Новой Зеландией и обширной частью Океании. Кроме того, через
эти спутники может быть организована связь с пунктами расположенными на всей
территории России, кроме самых крайних северных и восточных районов, Европы,
Азии, Африки, восточных районов США и Канады и др.
В ходе
выполнения представленных работ были получены следующие основные результаты.
- Сформулирована в
достаточно полной постановке, так называемая, общая баллистическая задача
выбора системы стационарных спутников.
- Предложена методология
решения общей баллистической задачи в детерминированной постановке, когда
предполагается, что каждый спутник системы будет постоянно удерживаться в
определенной точке стационарной орбиты (например, путем маневрирования).
Решение задачи в этой постановке сведено к работе с картой и шаблонами,
прилагаемыми к отчету.
- Выполнен полный цикл
баллистических расчетов, необходимых для выбора систем стационарных спутников
для обеспечения связи РФ с Южной Америкой, с Австралией и, по возможности, с Океанией.
При определенных ограничениях на углы видимости каждого спутника системы (см.
раздел 5) показано, что система должна включать как минимум два спутника с
долготами стояния на орбите 12.00З.д. и 102,70В.д.
Показано, что можно обойтись одним пунктом связи с обоими спутниками (со
стороны России), который целесообразно расположить в низовьях Волги или в
регионах России, прилегающих к Северному Кавказу.
1. Заславский Г.С. Алгоритм расчета
вероятности выполнения ограничений на движение космического аппарата
относительно небесного тела. Препринт ИПМ им. М.В. Келдыша РАН N2, 1991.
2. Эльясберг П.Е. Введение в теорию полета
искусственных спутников Земли. М.: Наука, 1996.
3. Гинзбург Г.А. Картографические проекции.
М., 1951.
4. Бажинов И.К., Заславский Г.С., Ястребов
В.Д. и др. Навигационное обеспечение полета орбитального комплекса
"Салют-6"-"Союз"-"Прогресс". М.: Наука, 1985.
5. Крылов В.И., Бобков В.В., Монастырский
П.И. Вычислительные методы в двух томах. М.: Наука, 1976, 1977.
|