Аннотация
Представлены проблемы, связанные с дорожным движением мегаполисов мира и России. Дан обзор
основных идей и методов в области математического моделирования транспортных потоков.
Описана математическая модель образования очереди у однополосного регулируемого перекрестка
с однополосным движением. Найдена средняя длина очереди у перекрестка по данной полосе.
Отмечены перспективные направления дальнейших исследований.
Abstract
The problems connected to traffic of megacities are submitted the world and Russia are
presented. The review of the basic ideas and methods in area of mathematical modeling
of transport streams is given. The mathematical model of formation of queue is given
at one-strip adjustable crossroads with one-strip movement. The average length of
queue at a crossroads on the given strip is found. Perspective directions of the further
researches are marked.
Введение
Введение
Современное общество нуждается в постоянном увеличении объема
транспортного сообщения, повышении его надежности, безопасности и
качества. Это требует увеличения затрат на улучшение
инфраструктуры транспортной сети, превращения ее в гибкую,
высокоуправляемую логистическую систему. При этом риск инвестиций
значительно возрастает, если не учитывать закономерности развития
транспортной сети, распределение загрузки ее участков.
Игнорирование этих закономерностей приводит к частому образованию
транспортных пробок, перегрузке/недогрузке отдельных линий и узлов
сети, повышению уровня аварийности, экологическому ущербу.
Для поиска эффективных стратегий управления транспортными потоками
в мегаполисе, оптимальных решений по проектированию
улично-дорожной сети и организации дорожного движения необходимо
учитывать широкий спектр характеристик транспортного потока,
закономерности влияния внешних и внутренних факторов на
динамические характеристики смешанного транспортного потока.
Теория транспортных потоков развивалась исследователями различных
областей знаний - физиков, математиков, специалистов по
исследованию операций, транспортников, экономистов. Накоплен
большой опыт исследования процессов движения. Однако, общий
уровень исследований и их практического использования не
достаточен в силу следующих факторов:
- транспортный поток нестабилен и многообразен, получение
объективной информации о нем является наиболее сложным и
ресурсоемким элементом системы управления;
- критерии качества управления дорожным движением
противоречивы: необходимо обеспечивать бесперебойность движения
одновременно снижая ущерб от движения, накладывая ограничения на
скорость и направления движения;
- дорожные условия, при всей стабильности, имеют
непредсказуемые как в части отклонения погодно-климатических
параметров так и, собственно, дороги;
- исполнение решений по управлению дорожным движением всегда
неточно при реализации и, учитывая природу процесса дорожного
движения, приводит к непредвиденным
эффектам [Report].
Таким образом, трудности формализации процесса движения
транспортного потока стали серьезной причиной отставания
результатов научных исследований от требований практики.
1 Проблемы дорожного движения в мире и России
Дорожное движение тесно связано с благосостоянием и жизнью людей.
Наиболее крупные дорожно-транспортные происшествия (ДТП) получают
такой же отклик в средствах массовой информации как катастрофы на
железных дорогах и авиакатастрофы. ДТП обходятся экономике в
среднем 2-3% ВВП. В 1999 году экономические потери от ДТП в
мире составили 500 млрд. долл. Размер ежегодного ущерба в России,
согласно данным интернет-портала Rambler, превышает 1 млрд. долл.
Проблемы дорожного движения в мегаполисах западных и европейских
стран, по сути, не отличаются от российских: заторы, ДТП и
загрязнение окружающей среды. Общепризнанные критерии качества
дорожного движения - уменьшение загрязнения окружающей среды и
чрезмерного уровня шумов, минимизация расхода топлива,
предупреждение образования и распространения транспортных заторов,
применимы и к западным и к российским магистралям.
Однако Москва, как мегаполис, обладает и рядом особенностей.
Во-первых, интенсивность транспортных потоков в Москве
превышает в несколько раз интенсивность движения в
европейских столицах. Например, в пределах Садового кольца по всем
магистралям могут проехать 25 тыс. автомобилей в час. Сейчас по
ним с трудом проезжает свыше 32 тыс. С подобной проблемой
сталкивались все мировые мегаполисы, как только уровень
автомобилизации в них достигал 50 машин на 1000 человек. Согласно
данным обследований, проведенных в 1999 и 2001 гг. Центром
исследований транспортной инфраструктуры г. Москвы (ЦИТИ), в
пиковый период на улично-дорожной сети Москвы одновременно
находится в движении более 180 тыс. транспортных средств
(увеличение этого числа до 230 - 250 тысяч приводит к образованию
заторов) и до 300 тыс. - припаркованы вне мест постоянного
хранения. В центральной части города, включая Садовое кольцо, эти
цифры составляют соответственно 25 и 75 тыс. автомобилей. Средняя
скорость движения по городу - около 33 км/ч, а в центральной части
- менее 18 км/ч [Government].
Во-вторых, московская система автомагистралей построена по
радиально концентрическому принципу. Из-за недостаточной
плотности улично-дорожной сети и несовершенства системы
организации маршрутов транспортных потоков для Москвы характерна
проблема перепробега. Оценки ЦИТИ показали, что
перепробег транспортных средств составляет в среднем 53%.
В-третьих, ключевые магистрали Москвы содержат много полос, что
нетипично для европейских городов.
Непосредственное применение западных моделей транспортных потоков
затруднено также рядом организационных и административных
особенностей отечественной транспортной системы. В отличие от
западных стран, в России отсутствуют системы организации
приоритета маршрутного и специального транспорта, оперативного
мониторинга, управления и перераспределения транспортных и
пассажирских потоков. Отсутствует нормативно-правовое обеспечение
управления движением, позволяющее вводить и реализовывать
мероприятия по ограничению движения, стоянки, надзора и
принуждения по введению этих мероприятий. Например, 77% из 192
тыс. личных автомобилей, зарегистрированных в Центральном
автономном округе Москвы, не обеспечены гаражами-стоянками. На
территории Садового кольца паркуется порядка 30 тыс. автомобилей.
Они занимают 675 га городских территорий, в несколько раз снижая
пропускную способность улиц.
Отметим, что для анализа транспортной сети Москвы требуются
специальные исследования. Западные модели не достаточно адекватны
в силу указанных отличий.
2 Моделирование
2.1 Актуальность моделирования
Можно ли обойтись без математических моделей и численных
экспериментов, ограничившись результатами инженерных расчетов? К
примеру, для расчета разгрузки дорожного участка, требуется знать,
какое количество автомобилей поворачивает на некотором перекрестке
направо. До сих пор никто туда не поворачивал - данных для
расчетов нет. Приходится опираться на грубые экспертные оценки.
Более того, транспортный поток все время подстраивается под
управляющие воздействия. Эффект просчитанной разгрузки исчезает
через некоторое время, за счет перераспределения транспортного
потока. Если в связи с флуктуациями или случайными факторами резко
возрастает количество заторов, на следующий день интенсивность
движения, как правило, снижается.
Следовательно, моделирование необходимо в силу следующих
свойств транспорной системы:
- компенсация увеличения пропускной способности при
развитии сети увеличением спроса и перераспределением его
в новых условиях;
- непредсказуемость поведения каждого водителя - выбор
маршрута, манера вождения и проч.;
- влияние случайных факторов (ДТП, погода и проч.) и
флуктуаций, связанных с сезонами, выходными и праздничными днями и
т.п.
2.2 Цели и задачи моделирования
В проведенных в 2000 - 2001 г.г. ЦИТИ разработках требований к
программным комплексам моделирования работы транспортной
системы Москвы [Proon]
были поставлены решаемые с помощью
моделирования задачи и определены требования к программным
комплексам моделирования, позволяющим решать эти задачи. К ним, в
частности, относятся
- Задачи в масштабе городской агломерации:
- как изменится работа транспортной системы при введении новых
элементов: линий метро, радиальных или кольцевых автомагистралей;
- каких изменений в транспортной системе города может
потребовать строительство нового жилого района или расположение
емкого центра притяжения посетителей;
- какого перераспределения потоков транспорта и пассажиров
следует ожидать в случае временного закрытия или ликвидации
какого-либо элемента транспортной системы;
- как может повлиять на работу системы введение экономических
санкций (плата за проезд по магистрали, за въезд в зону центра,
введение зонного тарифа в метро и т.п.);
- какой эффект может дать внедрение автоматизированных систем
управления уличным движением.
- Задачи локального порядка: какой эффект даст
перепланировка перекрестка, группы перекрестков, расширение
проезжей части улицы, изменения в организации движения на
пересечениях, оптимизация светофорного регулирования,
изменение условий пересадки пассажиров и т.п.
- Задачи анализа работы улично-дорожной сети,
пассажирского (уличного и внеуличного) и грузового транспорта.
Моделирование транспортной ситуации может проводиться на любой
расчетный срок - от оперативных задач сегодняшнего дня до
долгосрочной (20-30 лет) перспективы. Условно, задачи
прогнозирования можно разделить на
- долгосрочные (отдаленная перспектива в 10 и более лет);
- среднесрочные (задачи первой очереди возможного
развития - около 5 лет);
- краткосрочные (анализ последствий намечаемых мероприятий
ближайших дней, недель, месяцев);
- оперативные (в реальном масштабе времени).
3 Исторические замечания
Основы математического моделирования закономерностей дорожного
движения были заложены в 1912 году русским ученым, профессором
Г.Д. Дубелиром.
Первостепенной задачей, послужившей развитию моделирования
транспортных потоков, стал анализ пропускной способности
магистралей и пересечений. Под пропускной способностью
понимают максимально возможное число автомобилей, которое может
пройти через сечение дороги за единицу времени. В специальной
литературе встречаются такие модификации понятия пропускной
способности, как теоретическая, номинальная, эффективная,
собственная, практическая, фактическая и другие. В настоящее
время пропускная способность является важнейшим критерием оценки
качества функционирования путей сообщения.
Первая макроскопическая модель (см. раздел ), в
которой движение транспортного потока рассматривалось с позиций
механики сплошной среды, была предложена в 1955 году Лайтхиллом
(Ligthill) и Уиземом (Whitham)
[WhithamEng1,Whitham]. Они
показали, что методы описания процессов переноса в сплошных средах
могут быть использованы для моделирования заторов.
Выделение математических исследований транспортных потоков в
самостоятельный раздел прикладной математики впервые было
осуществлено Ф. Хейтом [Heit].
В 60 - 70-е годы вновь возник интерес к исследованию транспортных
систем. Эта заинтересованность проявилась в том числе, в
финансировании многочисленных контрактов, обращении к авторитетным
ученым - специалистам в области математики, физики, процессов
управления, таким как Нобелевский лауреат И. Пригожин, специалист
по автоматическому управлению М. Атанс, автор фундаментальных
работ по статистике Л. Брейман. В нашей стране движение
автотранспорта активно изучалось в конце 70-х годов в связи с
подготовкой к Олимпийским играм 1980 года в Москве. Результаты
этих исследований неоднократно докладывались на
научно-исследовательском семинаре И.И. Зверева на
механико-математическом факультете МГУ им.
М.В. Ломоносова [msu].
Сегодня имеется обширная литература по изучению и моделированию
автотранспортных потоков. Несколько академических журналов
посвящены исключительно динамике автомобильного движения. Наиболее
крупными являются Transportation Research,
Transportation Science, Mathematical Computer
Simulation, Operation Research, Automatica,
Physical Review E, Physical Reports. Количество
публикуемых статей исчисляется сотнями.
В конце 80-х начале 90-х в США проблемы исследования транспортных
систем были возведены в ранг проблем национальной безопасности. К
решению этой задачи были привлечены лучшие "физические
умы" и компьютерная техника Национальной исследовательской
лаборатории Лос-Аламос - Los Alamos National Lab (LANL).
4 Математическое моделирование транспортных потоков
В моделировании дорожного движения исторически сложилось два
основных подхода - детерминистический и вероятностный
(стохастический).
В основе детермининированных моделей лежит функциональная
зависимость между отдельными показателями, например, скоростью и
дистанцией между автомобилями в потоке. В стохастических моделях
транспортный поток рассматривается как вероятностный процесс.
Все модели транспортных потоков можно разбить на три
класса [Brailov]: модели-аналоги, модели следования за
лидером и вероятностные модели.
В моделях-аналогах движение транспортного средства
уподобляется какому либо физическому потоку (гидро и
газодинамические модели). Этот класс моделей принято называть
макроскопическими.
В моделях следования за лидером существенно
предположение о наличии связи между перемещением ведомого
и головного автомобиля. По мере развития теории в
моделях этой группы учитывалось время реакции водителей,
исследовалось движение на многополосных дорогах, изучалась
устойчивость движения. Этот класс моделей называют
микроскопическими.
В вероятностных моделях транспортный поток
рассматривается как результат взаимодействия транспортных средств
на элементах транспортной сети. В связи с жестким характером
ограничений сети и массовым характером движения в транспортном
потоке складываются отчетливые закономерности формирования
очередей, интервалов, загрузок по полосам дороги и т. п. Эти
закономерности носят существенно стохастический характер.
В последнее время в исследованиях транспортных потоков стали
применять междисциплинарные математические идеи, методы и
алгоритмы нелинейной динамики. Их целесообразность обоснована
наличием в транспортном потоке устойчивых и неустойчивых режимов
движения, потерь устойчивости при изменении условий движения,
нелинейных обратных связей (см. далее раздел ),
необходимости в большом числе переменных для адекватного описания
системы.
5 Гидродинамические модели транспортного потока
Транспортный поток можно рассматривать как поток одномерной
сжимаемой жидкости, допуская, что поток сохраняется и
существует взаимнооднозначная зависимость между скоростью
и плотностью транспортного потока.
Первое допущение выражается уравнением неразрывности. Второе -
функциональной зависимостью между скоростью и плотностью для учета
уменьшения скорости движения автомобилей с ростом плотности
потока. Это интуитивно верное допущение теоретически может
привести к отрицательной величине плотности или скорости.
Очевидно, одному значению плотности может соответствовать
несколько значений скорости. Поэтому для второго допущения
средняя скорость потока в каждый момент времени должна
соответствовать равновесному значению при данной плотности
автомобилей на дороге. Равновесная ситуация - чисто
теоретическое допущение и может наблюдаться только на участках
дорог без пересечений. Поэтому часть исследователей отказались от
непрерывных моделей, часть рассматривает их как слишком грубые.
Среди гидродинамических моделей различают модели с учетом и без
учета эффекта инерции. Последние могут быть получены из уравнения
неразрывности, если скорость рассматривать как функцию плотности.
Модели, учитывающие инерцию, представляются уравнениями
Навье-Стокса со специфическим членом, описывающим стремление
водителей ехать с комфортной скоростью.
5.1 Закон сохранения транспортного потока
Рассмотрим поток транспорта на однополосной дороге, т.е. при
движении без обгонов. Плотность автомобилей (количество
автомобилей на единицу длины дороги) r(x, t), x О R в момент времени t і 0. Число автомобилей в
интервале (x1, x2) в момент времени t равно
Пусть v(x, t) - скорость автомобилей в точке x в
момент t. Число проходящих через x (единицу длины) автомобилей
в момент t, есть r(x, t)v(x, t). Найдем уравнение изменения
плотности. Число автомобилей в интервале (x1, x2) за время t
изменяется в соответствии с числом въезжающих и выезжающих машин:
|
|
d
d t
|
|
x2
у
х
x1
|
r(x, t)dx=r(x1,t)v(x1, t)+r(x2, t)v(x2, t). |
| (2) |
Интегрируя по времени и полагая, что r и v - непрерывные
функции, получим
| |
|
t2
у
х
t1
|
|
x2
у
х
x1
|
|
¶ r(x,t)
¶t
|
dx dt |
|
|
|
|
t2
у
х
t1
|
|
ж
и
|
r(x1,t)v(x1, t)+r(x2, t)v(x2,t) |
ц
ш
|
dx dt= |
| |
| |
|
| - |
t2
у
х
t1
|
|
x2
у
х
x1
|
|
¶ (r(x,t)v(x, t)
¶x
|
dx dt. |
| | (3) |
|
Поскольку x1, x2 О R, t1, t2 > 0 произвольны,
|
rt+(rv)x=0, x О R, t > 0. |
| (4) |
Дополним это уравнение начальными условиями
Найдем уравнение для скорости v. Положим, что v зависит только
от плотности r. Если дорога пуста (r = 0), автомобили едут
с максимальной скоростью v=vmax. При наполнении дороги,
скорость падает вплоть до полной остановки (v=0), когда машины
расположены "бампер-к-бамперу" (r = rmax). Эта
простейшая модель выражается следующим линейным соотношением
(рис. )
|
v(r)=vmax |
ж
и
|
1- |
r
rmax
|
|
ц
ш
|
, 0 Ј r Ј rmax. |
| (6) |
Тогда уравнение (4) примет вид
|
rt+ |
й
л
|
vmaxr |
ж
и
|
1- |
r
rmax
|
|
ц
ш
|
|
щ
ы
|
x
|
=0, x О R,t > 0. |
| (7) |
Очевидно, это закон сохранения количества автомобилей. В
самом деле, интегрируя (7) по x О R,
получим
|
|
d
dt
|
|
у
х
R
|
r(x, t)dx=- |
у
х
R
|
|
¶
¶x
|
|
й
л
|
vmaxr(x, t) |
ж
и
|
1- |
r(x,t)
rmax
|
|
ц
ш
|
|
щ
ы
|
dx=0, |
| (8) |
и, следовательно, количество автомобилей в R постоянно
для любых значений t і 0.
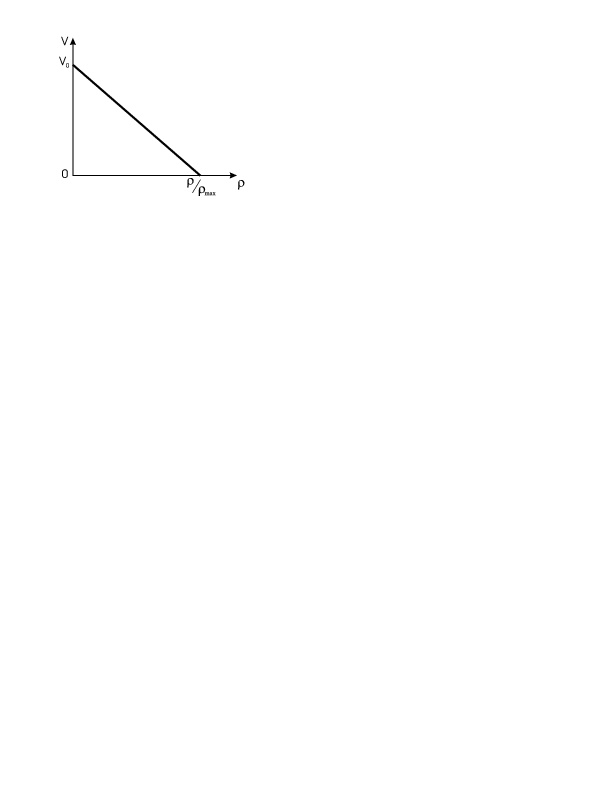 Figure 1: Линейная аппроксимация Гриншилдса.
Figure 1: Линейная аппроксимация Гриншилдса.
5.2 Модели Гриншилдса и Гринберга
Можно построить макроскопическую модель, в которой уравнение
Гриншилдса является частным случаем [Inose]. Рассмотрим связь
между скоростью v и плотностью r автомобилей на дороге. В
общем случае, когда плотность r повышается, водители снижают
скорость и наоборот, поэтому
|
v=v |
м
н
о
|
r(x(t), t) |
ь
э
ю
|
, |
| (9) |
где x(t) - координата движения элемента потока.
Проследим изменение скорости для некоторого передвигающегося
элемента потока во времени, которое определяется как полная
производная по времени
|
|
dv
dt
|
= |
dv
dr
|
|
¶r
¶t
|
+ |
dv
dr
|
|
¶r
¶x
|
|
dx
dt
|
. |
| (10) |
Из (4) следует соотношение
|
|
¶r
¶t
|
=-r |
dv
dx
|
-v |
¶r
¶x
|
, |
| (11) |
которое после подстановки в (10) принимает вид
|
|
dv
dt
|
=-r |
dv
dx
|
|
ж
и
|
|
dv
dr
|
|
ц
ш
|
-v |
¶r
¶t
|
|
ж
и
|
|
dv
dr
|
|
ц
ш
|
+v |
¶r
¶t
|
|
ж
и
|
|
dv
dr
|
|
ц
ш
|
=-r |
dv
dx
|
|
ж
и
|
|
dv
dr
|
|
ц
ш
|
. |
| (12) |
Так как согласно (9)
соотношение (12) можно переписать в виде
|
|
dv
dt
|
=-r |
ж
и
|
|
dv
dr
|
|
ц
ш
|
2
|
|
¶r
¶x
|
=- r(vў)2 |
¶r
¶x
|
, |
| (14) |
где vў=dv/dr, а отрицательный коэффициент пропорциональности
[- r(vў)2] можно интерпретировать как вязкость в жидкости.
Для классической сжимаемой жидкости уравнение (14)
называется уравнением Эйлера, в этом случае:
где C - неотрицательная константа с размерностью скорости.
Принято рассматривать более общий класс моделей, в которых
Уравнение (15) соответствует случаю n № -1,
следовательно, из уравнений (14) и (15)
vў=C2r(n-1)/2. Решением этого уравнения будет
при n=-1, и
|
v= |
C
n+1
|
|
й
л
|
rmax(n+1)/2-r(n+1)/2 |
щ
ы
|
|
| (18) |
при n № 1.
Модель (17) была впервые получена
Гринбергом [Greenberg]. Обозначив за v0 - скорость
при r = 0, для значений n Ј 0, можно записать
|
v=v0 |
ж
и
|
1- |
й
л
|
|
r
rmax
|
|
щ
ы
|
(n+1)/2
|
|
ц
ш
|
. |
| (19) |
Уравнение (6), впервые полученное
Гриншилдсом [Greenshields], является частным случаем
уравнения (19) при n=1.
5.3 Модель Лайтхилла-Уизема. Кинематические
волны
При построении модели были приняты следующие
допущения [Whitham]:
- транспортный поток непрерывен, его плотность
r(x, t) есть число машин занимающих единицу длины дороги;
- величина потока q(x, t) равна числу машин пересекающих
черту x за единицу времени, определяется локальной
плотностью r:
Скорость потока равна V(r)=[(Q(r))/(r)], т.е. средняя
скорость является функцией плотности V(x, t)=Ve(r(x, t));
- на участке дороги без съездов-въездов количество машин
сохраняется (7).
Уравнения (20) и (7) образуют полную
систему. После подстановки получим
где c(r)=Qў(r)=Ve(r)+rVўe(r) - скорость
распространения возмущений.
Соотношение Q(r)=rVe(r) играет важную роль в теории
транспортных потоков и называется фундаментальной
диаграммой (рис.). В модели Лайтхилла-Уизема эта
зависимость непрерывна, следовательно, предельная пропускная
способность участка дороги определяется плотностью потока.
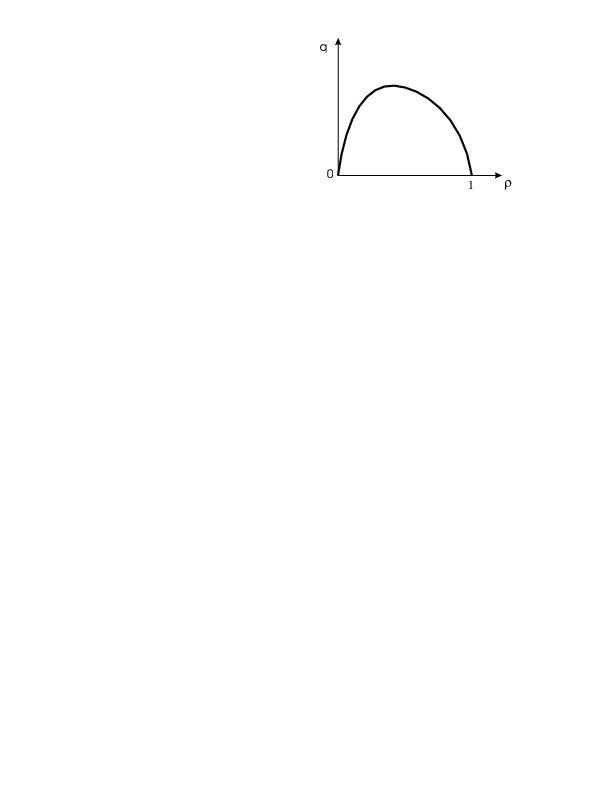 Figure 2: Фундаментальная диаграмма транспортного потока.
Общий вид решения нелинейного уравнения (21):
Figure 2: Фундаментальная диаграмма транспортного потока.
Общий вид решения нелинейного уравнения (21):
где F - произвольная функция. Соотношение (22)
описывает бегущую волну, рассматриваемую как волну
уплотнения в среде. Волны типа (22) называют
кинематическими волнами, что подчеркивает их
кинематическое происхождение в противоположность динамической
природе акустических и упругих волн.
5.4 Ударные волны в транспортном потоке
Анализ рассмотренных моделей показал существование области
неустойчивости на кривых q(v) [Nagel]. Рассмотрим модель
Гриншилдса (6) (случай n=1). Пусть скорость v
лежит в пределах
так что [(dq)/(dv)] > 0. Если по какой-либо причине скорость
некоторой части потока понизится на Dv, интенсивность
движения понизится на rj(1- 2v/v0)Dv. Плотность
этой части потока r повысится, и скорость будет далее
снижаться. Возмущение скорости является незатухающим, что и
демонстрирует неустойчивость поведения транспортного потока. В
этих случаях автомобили в потоке вынуждены неоднократно трогаться
с места и останавливаться. Это явление носит название
ударной волны.
Уравнение (4) также демонстрирует наличие
ударных волн. Его решение было впервые предложено Лайтхиллом и
Уиземом (1955) и независимо Ричардсом (1956). Аналитическое
решение уравнения (4) в общем случае
сложно и в практических расчетах не используется. Для частного
случая, на участке дороге без съездов-въездов можно положить
q=f(r) или v=f(r) (равновесный поток), то есть
Перепишем теперь уравнение (4)
в виде:
|
|
ж
и
|
f(r)+r |
df(r)
dr
|
|
ц
ш
|
|
¶r
¶x
|
+ |
¶r
¶t
|
=0. |
| (25) |
Функция f(r), вообще говоря, произвольна. Если положить связь
скорость-плотность линейной (Гриншилдс, 1934), то уравнение
(25) примет вид
|
|
ж
и
|
v0-2v0 |
r
rj
|
|
ц
ш
|
|
¶r
¶x
|
+ |
¶r
¶t
|
=0. |
| (26) |
Уравнение (25) решается методом характеристик.
Анализ решения уравнения (26) приводит к следующим
выводам (см. [Nagel]):
- плотность r постоянна вдоль семейства характеристик;
- наклон характеристик
|
|
dx
dt
|
=f(r)+r[f(r)]= |
dq
dr
|
, |
| (27) |
равен тангенсу наклона кривой плотности потока в точке,
представляющей состояние потока на границе, с которой выходят эти
характеристики;
- плотность в любой точке фазовой области (x, t) находится
проведением собственных характеристик через эту точку.
Пересечение характеристик объясняется существованием ударных волн,
так как в точке пересечения плотность имеет два значения, что
физически невозможно. Математически ударная - разрыв r, q
или v. Скорость ударной волны определяется наклоном линии,
соединяющей два состояния потока (восходящий и нисходящий)
где rd, qd представляют течение потока вниз, а
ru, qu - вверх. Когда vw > 0, ударная волна движется
вниз относительно дороги, если vw < 0 - вверх.
5.5 Гидродинамические модели второго порядка-1
Рассмотренные модели выше имеют следующие ограничения:
- стационарность соотношения скорость-плотность (средняя
скорость движения при определенной плотности устанавливается
мгновенно);
- колебательные решения, описывающие возникновение неустойчивости в виде
регулярных старт-стоп волн с зависящим от
амплитуды временем колебания не могут быть выведены из уравнений
кинематических волн;
- не позволяют описать явление гистерезиса - возврат
потока в устойчивое состояние при меньших значениях
плотности [Treiterer].
В реальном потоке плотность не меняется скачками. Водители обычно
снижают скорость при увеличении плотности машин впереди, и
наоборот. Поэтому q зависит еще и от градиента
плотности rx [WhithamEng1,Whitham]
где n - некоторая положительная постоянная величина.
В силу (21) и (29) имеем
|
rt+c(r)rx=nrxx, c(r)=Qў(r). |
| (30) |
Умножив (30) на cў(r), перепишем его в виде
|
ct+c cx=ncў(r)rxx=ncxx-nc"(r)r2x. |
| (31) |
При аппроксимации Q(r) квадратичной функцией, c(r) будет
линейна по r, а c"(r)=0. Таким образом, уравнение
(31) принимает вид уравнения Бюргерса
где член c cx описывает образование "пробок" -
быстрые машины догоняют медленные, возникает скачок плотности.
Член ncxx задает конечную ширину этого скачка. Уравнение
Бюргерса (32) можно рассматривать как одномерное
уравнение Навье-Стокса для сжимаемой жидкости с единичной
плотностью. Нелинейное уравнение (32) сводится к
линейному уравнению теплопроводности заменой Коула-Хопфа
|
c=2n |
¶
¶x
|
lny(x,t)=-2n |
jx
j
|
|
| (33) |
При изучении свойств транспортного потока представляют интерес
также и другие версии уравнения Бюргерса [Krug,Binder].
5.6 Гидродинамические модели второго порядка-2
Недостатком модели Лайтхилла-Уизема является допущение о
равновесном значении скорости Ve при данной плотности
автомобилей. Это не позволяет адекватно описывать ситуаций вблизи
неоднородностей дороги (въезды, съезды и сужения).
Для описания неравновесных ситуаций вместо детерминированного
уравнения V(x, t)=Ve(r(x, t)) было предложено использовать
дифференциальное уравнение для моделирования динамики
средней скорости. Впервые предложенное Пэйном (Payne) в 1971 году
уравнение скорости имело вид [Payne]
|
vt+vvx=- |
c(r)
r
|
rx+ |
1
t
|
(Ve(r)-r), |
| (34) |
где
Уравнение (34) было выведено из микроскопического
описания движения отдельных автомобилей в соответствии с моделью
следования за лидером. Слагаемое v vx называется
конвекционным и описывает изменение скорости в данном
месте дороги за счет кинематического переноса автомобилей из
предшествующего сегмента дороги со средней скоростью потока.
Первое слагаемое в правой части называется упреждающим и
описывает тенденцию к сокращению скорости при возрастании
плотности. Наиболее общая форма упреждающего члена имеет
вид [PartHopMod]:
Второе слагаемое в правой части называется релаксационным
и описывает тенденцию приближения средней скорости v к
равновесному при данной плотности значению Ve(r), t
- характерное время релаксации.
Анализ эмпирических данных показывает, что при высоких значениях
плотности ламинарное движение транспортного потока становится
неустойчивым, и малые возмущения приводят к возникновению
старт-стоп волн. Именно устойчивость в линейном приближении к
малым возмущениям при всех значениях плотности стационарного
однородного решения
r(x, t) є r0,
V(x, t) є Ve(r0) уравнения Пэйна является его
существенным недостатком. Этот недостаток можно устранить
следующим изменением в упреждающем члене уравнения
|
c(r)= |
d
d r
|
Pe(r), Pe(r)=rQe(r). |
| (37) |
Здесь P - внутреннее давление транспортного потока,
выраженное через вариацию скоростей в потоке Q. Тогда
уравнение скорости при такой замене приобретает вид [Philips]
|
vt+vvx=- |
1
r
|
¶xPe+ |
1
t
|
(Ve(r)-v). |
| (38) |
Уравнение (16) описывает поведение водителей в зависимости от
давления потока впереди - торможение при его возрастании и
ускорение в противном случае. Для оценки вариации Q как
функции плотности, применяются различные приближения, полученные
при анализе эмпирических данных. Например, в моделях Кюне
(Kühne) и Кернера-Конхойзера (Kerner-Konhauser) в качестве
первого приближения используется положительная
константа [Kerner]: Qe(r)=Q0.
Уравнение (16) также предсказывает возникновение ударных
волн. Для предотвращения разрывов в правую часть добавляется
диффузионный член nvxx, аналог вязкости в уравнениях
гидродинамики
|
vt+v vx=- |
Q0
r
|
rx+nvxx+ |
1
t
|
(Ve(r)-v). |
| (39) |
Анализ устойчивости стационарного однородного решения показывает,
что при значениях плотности, превышающих критическое значение,
решение становится неустойчивым к малым возмущениям. Это свойство
позволяет моделировать возникновение фантомных заторов -
режимов старт-стоп волн в однородном потоке, возникающих в
результате малых случайных возмущений. Известная модель этого
класса - модель Кернера-Конхойзера. Стандартная
модель [Kerner] предполагает уравнение в форме
|
|
¶v
¶t
|
+v |
¶v
¶x
|
= |
1
t
|
(V(r)-v)-c02 |
¶L(r)
¶x
|
+ |
m
r
|
|
¶2v
¶x2
|
. |
| (40) |
Правая часть (40) содержит три коэффициента, касающихся
скорости транспортного потока. Первый член отражает тенденцию
потока на заданной плотности r к понижению средней скорости
V(r) до некоторой естественной величины. При малых плотностях
эта скорость определяется дорожными условиями и ограничениями по
скорости движения и слабо зависит от r. При высоких
плотностях, V(r) приближается к нулю и слабо зависит от
r. При средних плотностях она быстро падает и сильно
обусловлена тем фактом, что при высокой плотности потока водителям
сложно совершить обгон. Таким образом мы предполагаем, что
V(r) будет убывающей функцией с малой производной при больших
и малых r. Второй - фактор упреждения, означает,
что водители снижают скорость, если впереди поток транспорта имеет
более высокую плотность. Безразмерная функция L(r) должна в
таком случае быть монотонно возрастающей. Ее обычно полагают
равной lnr, а величина c02r играет роль давления.
Последний член - "вязкость" или "диффузия",
отражает тенденцию согласования скорости движения со скоростью
окружающих автомобилей в потоке.
6 Стохастические модели
Одной из важнейших характеристик перекрестка является длина
очереди автомобилей, ожидающих проезда. Построим простую модель
образования очереди на перекрестке со светофорным регулированием.
Рассмотрим пересечение двух дорог с односторонним движением. Пусть
t+ - длительность горения зеленого света, а t -
длительность всего цикла светофора. Предположим, что когда для
одной полосы загорелся красный свет, зеленый свет для второй
полосы загорается спустя некоторое время, чтобы
"проскочившие" автомобили успели проехать.
Пусть поток автомобилей, проходящих через точку А
(некоторую точку на участке дороги перед перекрестком), есть
простейший поток с параметром l, l > 0. При
накоплении автомобилей в системе точка А сдвигается влево
(рис. ).
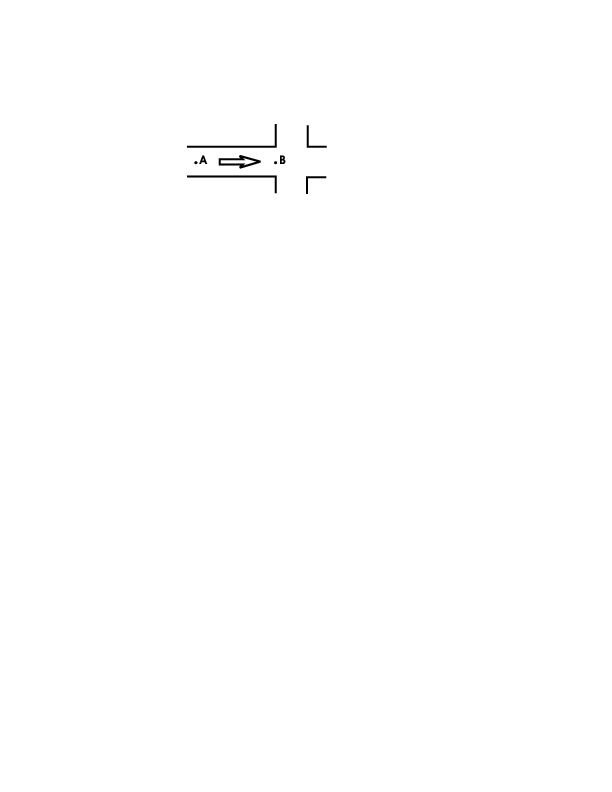 Figure 3: Модель очереди на перекрестке.
Автомобили, поступающие в систему, либо пересекают перекресток
(получают обслуживание как запросы), если проезд свободен и горит
зеленый свет, либо становятся в очередь у перекрестка.
Предположим, что водители не едут на красный свет, даже если на
пересекающей полосе пусто.
Обслуживание одного автомобиля в рамках данной модели представляет
собой проезд через точку В - начало перекрестка. Примем
время проезда через точку В одинаковым для всех
автомобилей и равным T, T > 0. За это время следующий
автомобиль подъезжает к перекрестку (точке В) и ждет
своего облуживания. Таким образом, поведение перекрестка будет
описывается с помощью однолинейной системы массового обслуживания
(СМО) с ожиданием и буфером размера M (максимальное число
автомобилей, способных поместиться на дороге), M О N.
Будем искать среднюю длину очереди. Допустим, что перед
перекрестком может стоять не более M автомобилей, M і 1.
Каждый автомобиль занимает одну ячейку (одинаковой длины для всех
автомобилей). Когда первый автомобиль проезжает через перекресток,
остальные, стоящие в очереди, подвигаются на одну ячейку вперед.
Подсчитаем, сколько автомобилей могут проехать перекресток за
период горения зеленого света. За единицу времени через
перекресток могут проехать T-1 автомобилей. Значит, на
зеленый свет через перекресток могут проехать t+T-1 автомобилей. Таким образом, величина
Figure 3: Модель очереди на перекрестке.
Автомобили, поступающие в систему, либо пересекают перекресток
(получают обслуживание как запросы), если проезд свободен и горит
зеленый свет, либо становятся в очередь у перекрестка.
Предположим, что водители не едут на красный свет, даже если на
пересекающей полосе пусто.
Обслуживание одного автомобиля в рамках данной модели представляет
собой проезд через точку В - начало перекрестка. Примем
время проезда через точку В одинаковым для всех
автомобилей и равным T, T > 0. За это время следующий
автомобиль подъезжает к перекрестку (точке В) и ждет
своего облуживания. Таким образом, поведение перекрестка будет
описывается с помощью однолинейной системы массового обслуживания
(СМО) с ожиданием и буфером размера M (максимальное число
автомобилей, способных поместиться на дороге), M О N.
Будем искать среднюю длину очереди. Допустим, что перед
перекрестком может стоять не более M автомобилей, M і 1.
Каждый автомобиль занимает одну ячейку (одинаковой длины для всех
автомобилей). Когда первый автомобиль проезжает через перекресток,
остальные, стоящие в очереди, подвигаются на одну ячейку вперед.
Подсчитаем, сколько автомобилей могут проехать перекресток за
период горения зеленого света. За единицу времени через
перекресток могут проехать T-1 автомобилей. Значит, на
зеленый свет через перекресток могут проехать t+T-1 автомобилей. Таким образом, величина
представляет собой пропускную способность перекрестка за время
горения зеленого света, где [·] есть целая часть числа.
Рассмотрим накопление автомобилей в системе за время одного цикла
светофора. Будем исследовать поведение системы в моменты времени
nT, n=[`(0,N)], то есть моменты начала периода зеленого
света и моменты окончания обслуживания запросов (автомобилей).
Обозначим через p(n)i вероятности того, что в момент времени
nT+0 (непосредственно сразу после ухода автомобиля из очереди)
длина очереди составляет i автомобилей,
n=[`(0,N)], i=[`(0,M)]. Обозначим также через
Pi(t) вероятность того, что за время t в систему
приедут i автомобилей, i і 0. Выражение для Pi(t)
имеет вид
|
Pi(t)=e-lt |
(lt)i
i!
|
, i і 0. |
|
Уравнения для вероятностей p(n)i,n=[`(0,N)],i і 0
имеют вид
| |
|
|
|
i
е
k=0
|
p(N)kPi-k(t*), i= |
0,M
|
, |
| |
| |
|
|
|
M
е
k=0
|
pk(N) |
Ґ
е
l=M-k
|
Pl(t*), t*=t-NT |
| |
|
|
|
(41) |
| |
|
|
|
i+1
е
k=1
|
pk(n-1)Pi- k+1(T), i= |
0,M-1
|
, |
| |
| |
|
|
M
е
k=0
|
pk(n-1) |
Ґ
е
l=M-k+1
|
Pl(T), n= |
1,N
|
, |
| |
|
причем каждая группа вероятностей pi(n),i=[`(0,M)]
удовлетворяет условиям нормировки
Обозначим через Ai=Pi(t*) [`(Ai)]i=еl=iPl(t*), Bi=Pi(T), [`(Bi)]=еi=1ҐPl(T) i і 0 и
распишем систему (41) более подробно:
| |
|
| |
| |
|
| | (43) |
| |
|
| |
| |
|
| pM(0)=p0(N)AM+p1(N)AM-1+...+pM(N)A0, |
| |
|
где Ai=Pi(t*), Bi=Pi(T).
| |
|
|
p0(n)=p0(n-1)B1+p1(n-1)B0, |
| |
| |
|
|
p1(n)=p0(n-1)B2+p1(n-1)B1+p2(n-1)B0, |
| | (44) |
| |
|
| |
| |
|
| pM(n)=p0( n-1) |
B
|
M+1
|
+p1(n-1) |
B
|
M
|
+...+pM( n-1) |
B
|
1
|
, n= |
1,N
|
|
| |
|
Запишем системы (43) и (44) в матричном виде
| |
|
| |
| |
|
| |
| |
|
| | (45) |
| |
|
| |
| |
|
|
®
p
|
(N)
|
= |
®
p
|
(N-1)
|
|
^
B
|
, |
| |
|
где
| |
®
p
|
(n)
|
=(p0(n),p1(n),...,pM(n)), n= |
0,N
|
, |
| |
|
| |
^
A
|
= |
й
к
к
к
к
к
к
к
л
|
|
щ
ъ
ъ
ъ
ъ
ъ
ъ
ъ
ы
|
, |
| |
|
| |
^
B
|
= |
й
к
к
к
к
к
к
к
л
|
|
щ
ъ
ъ
ъ
ъ
ъ
ъ
ъ
ы
|
, |
| |
|
Из системы (45) и условия нормировки (42) при
n=0 находим значение для вектора [(p)\vec](0)
где 1=(1, 1, ..., 1)T.
Остальные векторы вероятностей находим с помощью равенств
|
|
®
p
|
(n)
|
= |
®
p
|
(n-1)
|
|
^
B
|
, n= |
1,N
|
. |
|
Тогда средняя длина очереди на перекрестке к моменту начала
периода зеленого света равна
7 Микроскопические модели
7.1 Модели следования за лидером
Кроме случая очень малых интенсивностей движение любого автомобиля
ограничено впереди идущим автомобилем.
 Figure 4: Порядок следования автомобилей.
Первоначально предполагалось, что каждый водитель согласует свою
скорость со скоростью впереди идущего автомобиля [Shvetsov]:
Figure 4: Порядок следования автомобилей.
Первоначально предполагалось, что каждый водитель согласует свою
скорость со скоростью впереди идущего автомобиля [Shvetsov]:
|
|
ЧЧ
x
|
(t)= |
1
t
|
( |
Ч
x
|
i
|
(t)- |
Ч
x
|
i+1
|
(t)), |
| (46) |
где t - время согласования скоростей (рис. 4).
Данная модель не описывает свойств неустойчивости, возникновения
ударных волн и заторов. Позднее был предложен ряд модификаций.
Например, в [Chandler] в левую часть уравнения
(46) добавляют задержку td » 1,3с,
описывающую время реакции водителя на изменение скорости
лидирующего автомобиля. Множитель 1/t в [Prigogine]
интерпретируется как коэффициент чувствительности
a, характеризующий скорость реакции водителя. Тогда
(46) можно записать в виде
дифференциально-разностного уравнения
|
|
ЧЧ
x
|
i
|
(t+td)=a( |
Ч
x
|
i
|
(t)- |
Ч
x
|
i+1
|
(t)). |
| (47) |
При a = const условие неустойчивости уравнения
(47) имеет вид td/t > 1/2. Наличие
неустойчивости позволяет моделировать ударные волны и заторы,
но предположение о неизменности чувствительности не позволяет
воспроизвести фундаментальную диаграмму. Более адекватная модель
получается при учете возрастания чувствительности с уменьшением
дистанции до лидирующего автомобиля. С этой точки зрения Газис
и др. [Gasis] преобразовали
уравнение (47)
|
|
ЧЧ
x
|
i+1
|
(t+td)=a( |
Ч
x
|
i+1
|
(t+td))n1 |
(xi(t)-xi+1(t))n2
|
|
| (48) |
и выполнили оценку коэффициентов n1 и n2 по
экспериментальным данным. Было найдено, что коэффициент корреляции
между xi+1(t+td) и
(xi+1(t+td))n1(xi(t)xi+1(t))/(xi(t)-xi+1(t))n2
равен 0,87; 0,78 и 0,73 для (n1, n2)=(1,2); (0,1) и (0,2)
соответственно и принимает меньшие значения порядка 0,2 - 0,5 для
других целочисленных комбинаций параметров n1 и n2.
Простейший случай n1=0 и n2=0
|
|
ЧЧ
x
|
i+1
|
(t+td)=a |
xi(t)-xi+1(t)
|
. |
| (49) |
часто используется для моделирования и теоретического анализа.
После интегрирования выражения (49), получаем
|
|
Ч
x
|
i+1
|
(t+td)=ln(rmax(xi(t)-xi+1(t))), |
| (50) |
где rmax - константа, описывающая движение автомобилей в
плотном потоке на очень близком расстоянии -
"бампер-к-бамперу".
Когда транспортный поток является стационарным, плотность r
выражается формулой r = 1/(xi(t)-xi+1(t)), а так как скорость
в стационарном режиме постоянна, то
Выражение (51) идентично уравнению (17), и
мы из микроскопической модели следования за лидером получаем
макроскопическую модель Гринберга.
7.2 Клеточные автоматы
Применение концепции клеточного автомата фон Неймана для
моделирования транспотных потоков впервые было предложено в
работе [Cremer]. Активные разработки начались с работ Нагеля
и Шрекенберга [NagelSchreckenberg]. В настоящее время имется
обширный набор публикаций по клеточным автоматам
(см. [Chowdhury]).
Формулировка исходной модели Нагеля-Шрекенберга заключается в
следующем [Shvetsov]. Пусть xn и vn координата и
скорость n-го автомобиля, dn=xn+1-xn - дистанция до
лидирующего автомобиля. Скорость может принимать одно из
vmax+1 допустимых целочисленных значений vn=0, 1, 2, ...,vmax. На каждом шаге t® t+1 состояние всех автомобилей в
системе обновляется в соответствии со следующими правилами:
- Ускорение. Если vn < vmax, то скорость n-го
автомобиля увеличивается на единицу, если vn=vmax, то
скорость не изменяется:
- Торможение. Если d Ј vn, то скорость n-го
автомобиля уменьшается до dn-1:
- Случайные возмущения. Если vn > 0, то скорость
n-го атомобиля может быть уменьшена на единицу с вероятностью
p; скорость не изменяется, если vn=0:
- Движение. Каждый автомобиль продвигается вперед на
количество ячеек, соответствующее его новой скорости после
выполнения шагов 1-3:
Первый шаг (52) отражает общее стремление всех
водителей ехать как возможно быстрее. Второй
(53) гарантирует отсутствие столкновений с впереди
идущими автомобилями. Элемент стохастичности, учитывающий
случайности в поведении водителей вносится на третьем шаге
(54).
8 Транспортные заторы
На сегодняшний день не существует общепринятого определения затора
(пробки). Карлос Даганзо (Carlos F. Daganzo) [Daganzo]
полагает, что на свободной дороге транспортный поток не образует
очередей, если малое возмущение скоростей, возникшее в некоторой
точке дороги, не распространяется вверх по потоку. И наоборот,
если возмущение скоростей, возникшее на некотором участке,
распространяется за его пределы, то в транспортном потоке
образуются скопления и возникают заторы.
Обычно описываются одиночные пробки и серия пробок [Daganzo].
8.1 Одиночные пробки
Одиночные заторы могут быть вызваны условиями дорожного движения,
например, красным светом светофора, аварией, сужением и т.п. В
такой ситуации условие превышения притока в пробку над оттоком
выполнить легко: например, если сужение имеет пропускную
способность qbn, а приток qin, то если qin > qbn,
пробка будет расти. Теоретически такое поведение схоже с
поведением очереди, описываемой теорией массового обслуживания, за
исключением наличия пространственного измерения - пробка
растет с хвоста. Такой пространственный рост хорошо
описывается теорией кинематических волн.
Эмпирические данные показывают, что пробки часто возникают на
однородном участке дороги, и выглядят как бы
"вставленными" в свободный поток. Пусть, к примеру, причиной
такой пробки стала авария, которая самоликвидировалась через
некоторое время. Расмотрим n, n О N транспортных
средств, стоящих друг за другом на однополосной дороге. В первый
момент времени может поехать первая машина, затем вторая и т. п.
За это время в хвост пробки может пристроиться еще некоторое
количество машин. Задав симметричные условия оттока и притока
автомобилей в пробку, получим область машин на дороге, имеющих
нулевую скорость, смещающуюся навстречу потоку. С точки зрения
водителя, пристроившегося в хвост - пробка "проходит через
него". Он сначала останавливается, а через некоторое время
может снова продолжить движение. Это стандартное волновое явление,
хорошо описываемое теорией кинематических волн.
8.2 Серия пробок
Наблюдения показывают, что отток транспортных средств из пробки
составляет в среднем одно транспортное средство за две секунды
для одной полосы движения. Обозначим его через q*.
Тогда пробка будет расти, если qin > q*.
Например, если вдали случится авария, то при условиях однородности
на выходе из этой аварии значительной пробки не образуется.
Действительно, если на выходе из первой пробки появится поток
q*, то из второй пробки поток составит ту же величину
q*. Таким образом возникает вопрос: может ли поток
поддерживать значения выше q* (т.н. суперкритический
поток [Nagel]), и если да, то как? Ответ на вопрос пока
не найден.
8.3 Классификация фаз потока
Борис Кернер (Boris S. Kerner) [Kerner] предложил следующую
классификацию фаз движения транспортного потока (рис. 4):
- Свободный поток. Пока дорога не загружена, водители
придерживаются желаемой скорости, свободно переходя на
соседние полосы. На этой стадии автомобили сопоставимы с
потоком свободных частиц.
- Синхронизированный поток. Когда дорога
становится переполненной, водители теряют возможность свободно
маневрировать и вынуждены согласовывать свою скорость со
скоростью потока. Эта стадия подобна потоку воды.
- Широкие перемещающиеся пробки. Здесь автомобили
(группы автомобилей) подобны кусочкам льда, движущимися в потоке
жидкости.
- Старт-стоп движение. При большом скоплении
автомобилей движение потока приобретает прерывистый характер. На
этой стадии транспортный поток можно уподобить потоку замерзающей
воды, автомобили становятся на какой-то промежуток времени как бы
"приклеенным" к данной точке дороги.
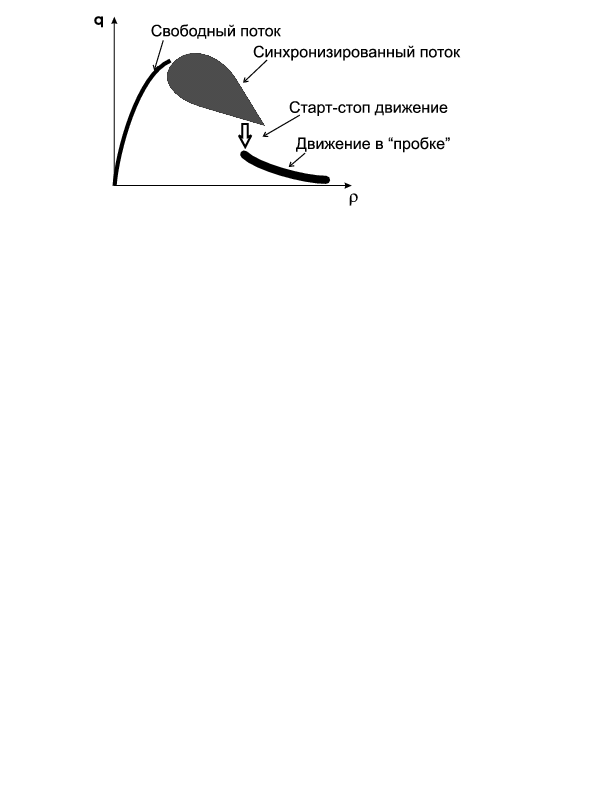 Figure 5: Фазовые состояния потока на многорядных магистралях.
Таким образом, при малых и очень высоких плотностях наблюдается
корреляция между потоком и плотностью, а для промежуточных
плотностей определенной ветви на фундаментальной диаграмме не
существует из-за сильной зависимости от специфики конкретной
дорожной сети. Предпринималось множество попыток объяснить эти
особенности [Nagel]. Работы об "обращении
l-формы фундаментальной диаграммы" (Koshi et. al.,
1983), "гистерезиса" (Treiterer и Myers, 1974),
"теории катастроф" (Persaud и Hall, 1989), "падения
пропускной способности" (Hall и Agyemang-Duah, 1991) и т.
п., указывают на возможность существования суперкритических
потоков, рис. . Другие исследования (Hall et. al., 1992;
Windover и Cassidy, 2001) показывают, что такие измерения вызваны
геометрическим строением дороги (например, наличием сужения).
Figure 5: Фазовые состояния потока на многорядных магистралях.
Таким образом, при малых и очень высоких плотностях наблюдается
корреляция между потоком и плотностью, а для промежуточных
плотностей определенной ветви на фундаментальной диаграмме не
существует из-за сильной зависимости от специфики конкретной
дорожной сети. Предпринималось множество попыток объяснить эти
особенности [Nagel]. Работы об "обращении
l-формы фундаментальной диаграммы" (Koshi et. al.,
1983), "гистерезиса" (Treiterer и Myers, 1974),
"теории катастроф" (Persaud и Hall, 1989), "падения
пропускной способности" (Hall и Agyemang-Duah, 1991) и т.
п., указывают на возможность существования суперкритических
потоков, рис. . Другие исследования (Hall et. al., 1992;
Windover и Cassidy, 2001) показывают, что такие измерения вызваны
геометрическим строением дороги (например, наличием сужения).
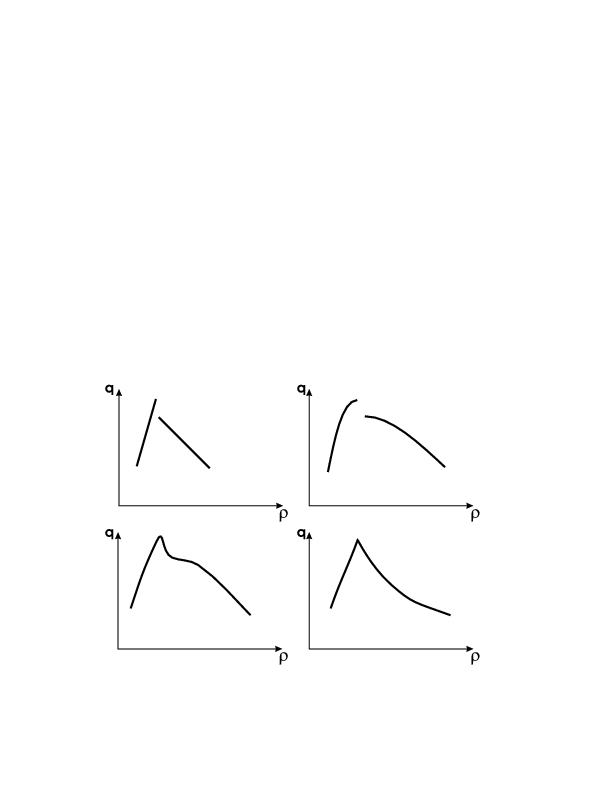 Figure 6: Теоретические аппроксимации эмпирической фундаментальной диаграммы.
Однако остается непонятным, как могут возникать пробки, т.е.
как поток, находящийся в свободном режиме, распадается и
переходит в смешанный - свободно-заторный (старт-стоп движение).
С одной стороны, анализ показывает, что часто имеются внешние
причины. С другой стороны, эксперименты с ездой по кругу показали
спонтанный распад потока [Kikuchi]. В этом эксперименте
водителей просили ехать с максимальной скоростью. В таких
искусственных условиях для распада потока требовалось около 10
минут!
Для синхронизированного режима движения не понятно, вызван ли
сильный разброс данных наличием съездов-въездов, или он имеет
статистическую природу, например, из-за взаимодействия разных
типов автомобилей и разных манер вождения.
Figure 6: Теоретические аппроксимации эмпирической фундаментальной диаграммы.
Однако остается непонятным, как могут возникать пробки, т.е.
как поток, находящийся в свободном режиме, распадается и
переходит в смешанный - свободно-заторный (старт-стоп движение).
С одной стороны, анализ показывает, что часто имеются внешние
причины. С другой стороны, эксперименты с ездой по кругу показали
спонтанный распад потока [Kikuchi]. В этом эксперименте
водителей просили ехать с максимальной скоростью. В таких
искусственных условиях для распада потока требовалось около 10
минут!
Для синхронизированного режима движения не понятно, вызван ли
сильный разброс данных наличием съездов-въездов, или он имеет
статистическую природу, например, из-за взаимодействия разных
типов автомобилей и разных манер вождения.
8.4 Причина затора - геометрические особенности дороги
Даганзо в работе [Daganzo] выдвигает гипотезу о том, причина
пробок кроется в "узких местах" - сужениях и
расширениях дороги, как постоянных, так и временных. Они являются
причиной образования, роста и распространения очередей на дорогах.
Даганзо определяет несколько типов "узких мест":
- Активные "узкие места". Между двумя
участками дороги имеется активное "узкое место", если
восходящий транспортный поток перегружен (вызывает очереди), а
нисходящий является свободным. Выявление активных "узких
мест" на участках дороги эффективно для предотвращения
транспортных происшествий.
- Слияния. Теория для "сливающихся" узких
мест утверждает, что максимально устойчивый поток, выходящий из
слияния, существует только тогда, когда условия для нисходящего
потока являются незагруженными. Это качество называется емкостью
(capacity). Если сумма входящих потоков превышает вместимость
слияния, выходящий поток заполняет емкость слияния полностью, а
остальной поток формирует очередь. Очередь растет как по одному,
так и по нескольким подъездам к слиянию. Эксперименты показывают,
что на одних участках поток становится переполненым через 10 мин,
а на других - не бывает переполненным.
- Расширения. Разновидность нескольких активных
"узких мест" на дороге. Если поток, пересекающий одну из
ветвей расширения, превышает его пропускную способность в течение
некоторого времени, то в общем подъезде к расширению может вырасти
очередь. Если этот подъезд узкий, очередь должна рассасываться по
дисциплине буфера - "первым вошел первым вышел" (FIFO)
- таким образом, что будут накапливаться и задерживаться
транспортные средства, которые должны ехать по другой ветви
расширения дороги. Подобная ситуация может иметь место и тогда,
когда один из подъездов широкий.
- Другие типы узких мест. Заторную активность можно
обнаружить на вертикальных и горизонтальных искривлениях дороги
("горки" и прогибы), в тоннелях, на наклонных участках
и других местах изменения характеристик и однороднородности
дороги. Заторы вызываются также временными внешними причинами,
такими как ДТП, отвлекающая внимание водителя активность около
дороги и даже информационные щиты.
8.5 Задержки транспортных средств
Большинство теорий утверждают, что задержки транспортных средств
зависят от двух компонент: от времени, за которое
автомобиль проехал бы через заторное место при отсутствии очереди
и от поведения потока в пределах заторного участка. То есть
практически, время задержки не зависит от структуры
очереди и, следовательно, управляющие воздействия нужно направлять
не на очередь, а на сами заторные участки [Daganzo].
8.6 Множественные устойчивые состояния и хаос
В литературе не удается найти результатов систематических
исследований свойств транспортного потока средствами нелинейной
динамики, однако, имеется некоторое количество публикаций,
отражающих связь понятий хаоса и транспортного потока.
В 1961 году И. Пригожиным и соавторами (см. [Prigogine,
PrigogineAndrews,PrigHer]) впервые была сформулирована
кинетическая модель транспортного потока в виде следующего
дифференциального уравнения:
|
¶t f + ¶x(fv) = |
ж
и
|
|
¶f
¶t
|
|
ц
ш
|
int
|
+ |
ж
и
|
|
¶f
¶t
|
|
ц
ш
|
rel
|
. |
| (56) |
Данное уравнение, как и уравнение (4),
является уравнением неразрывности, выражающим закон сохранения
автомобилей, но уже в фазовом пространстве, т.е. плотности
распределения автомобилей по координате и скорости. Слагаемые в
левой части описывают изменение фазовой плотности и за счет
кинематического переноса, в то время как слагаемые в правой части
описывают процесс мгновенных изменений скоростей автомобилей за
счет так называемых процессов взаимодействия и релаксации.
Согласно Пригожину, под взаимодействием двух автомобилей на дороге
понимается событие, при котором более быстрый автомобиль догоняет
более медленный. При этом водитель быстрого автомобиля либо
совершает обгон, либо снижает свою скорость до скорости впереди
идущего автомобиля. Скорости автомобилей в потоке не коррелированы
до и после взаимодействия, т.е. верна гипотеза
"автомобильного хаоса (по аналогии с
"молекулярным хаосом").
Эмпирические аргументы в пользу хаоса в потоке транспорта можно
найти в работах Кернера и Реборна (Kerner, Rebhorn, 1997) и
Кернера (Kerner, 1999). В них было показано, что локальные
пробки могут существовать пока сохраняются их характеристические
свойства в течение нескольких часов. То есть, помеха на
микроуровне в транспортном потоке может привести образованию
пробок [Kerner,KeRehb].
Рейнхард Кюне (Reinhard D. Kühne) [Keuhne]
проанализировал возможное уравнение момента для транспортного
потока вида:
|
¶tv+v¶xv=- |
c20
r
|
¶xr+ |
1
t
|
(V(r)-v)+n¶2xv, |
| (57) |
дополненное для полноты системы уравнением непрерывности:
Для этого уравнения однородное решение (v,r) є (v0r0) нестабильно для близких к максимальным
плотностям потока транспорта при соответствующем выборе
параметров. Используя методы нелинейной динамики Р. Кюне и
др. [Kuhne,Rodiger,
Sick] определили множество фиксированных
точек устойчивости и неустойчивости и предельные циклы, которые
означают, что транспортный поток при близкой к максимальной
плотности, функционирует на странном аттракторе.
В работе [Daganzo] утверждается, что можно построить простые
сети с источниками, устойчивыми по отношению к выходным потокам.
Такая устойчивость может сохраняться в двух случаях:
- при насыщенной на всем протяжении дороги конфигурации, когда
некоторые очереди распространяются против источников, и тем самым,
блокируют исходящие от них потоки;
- при ненасыщенной конфигурации очередей, что позволяет всем
источникам беспрепятственно объединять свои потоки.
Кроме того, в таких типах сетей временное возмущение
может постоянно менять состояние насыщения сети.
Возникающие изменения могут "по цепной реакции" вызвать
дальнейшие изменения. Поведение транспортного потока в
переполненных сетях со связанными заторными участками является по
природе хаотичным. Этот факт и невозможность на сегодняшний день
точно предсказать некоторые основные начальные данные (например,
маршрут, выбранный водителем) вынуждает переосмыслить роль
прогнозирующих моделей [Daganzo].
8.7 Основные выводы
Современные представления, лежащие в основе макромоделей
транспортного потока начали формироваться с 80-х годов XX века.
Первоначально считалось, что ансамбли машин на магистралях
проявляют воспроизводимые свойства, зависящие не от особенностей
отдельных водителей, а только от технических характеристик
автомобилей, расстоянием между ними и реакцией водителей. Когда
дистанция между водителями становится ниже критического значения,
задержка в реакции водителей приводит к неустойчивости движения -
старт-стоп волнам. Позднее Кернер и Реборн [Kerner1996]
выявили еще несколько фаз. В итоге, современные представления о
стадиях транспортного потока сложились в следующую картину:
- поведение транспортного потока уподобляется фазовым
переходам газ ® жидкость ®
замерзающая жидкость ®
лед [SwissKonf];
- причина фазовых переходов лежит в недрах самого
транспортного потока - подход оказался плодотворным и привел к
открытию кластеров на автострадах (Кернер-Конхойзер);
- влияние внешних факторов на поведение потока расматривается
как неизбежное зло и выступает в роли флуктуаций - обобщения
разнообразных возмущающих воздействий на транспортный поток;
- основное внимание исследователи уделяют моделированию
перехода жидкость ® замерзающая жидкость,
как на самом трудно воспроизводимом в силу его нелинейности;
Похоже, этот подход исчерпал ресурсы развития. В последнее время
зарождаются новые представления [Daganzo]:
- поведение транспортного потока определяется
сужениями и расширениями дороги, причем эти
понятия трактуются предельно общно;
- основным объектом исследования должны выступать очереди (их
свойства, структуры, поведение и проч.), возникающие около
сужений;
- для приемлемых предсказаний поведения потока достаточно
построить группу простых моделей сужений дороги.
9 Перспективные направления исследований
Проблема образования предзаторных и заторных ситуаций еще до конца
не изучена. Вот несколько цитат [L-A]:
- "Состояние дела в этой области на сегодня таково, что,
не смотря на значительный прогресс, полное понимание
природы автомобильных пробок еще не достигнуто". Ученые
говорят, что они пока находятся ближе к пониманию процессов
зарождения Вселенной, чем образования автомобильных заторов.
- "Физика предлагает широкое разнообразие методов для
объяснения движения. Но все еще остается много открытых
проблем", - говорит немецкий физик Кай Нагель (Kai Nagel),
ключевая фигура в проекте Лос-Аламоса (LANL).
- "Причина внезапного перехода от режима свободного
движения к старт-стоп режиму остается одной из тайн нашего
времени", говорит профессор университета Штата Техас Хани
Махмасани (Hani S. Mahmassani), пожалуй, ведущий американский
эксперт в теории движения автомобильных потоков.
В Дьюисберге (Германия) физик Майкл Шрекенберг (Michael
Schreckenberg) получивший прозвище "Профессор Пробок" и
15 его коллег проводили эксперименты, преднамеренно создавая
заторы. В результате они пришли к выводу - переход от свободного
потока к синхронизированному может случаться спонтанно -
намного быстрее, чем это предполагалось раньше. Часто, это
случается около наклонных въездов на автомагистраль, когда
происходит внезапное взрывное увеличение числа автомобилей
на дороге, что может превращать поток в "движущееся
желе". Такое инертное состояние распространяется вверх и
вниз по дороге, сохраняясь, возможно несколько часов, даже после
того как наклонный въезд опустеет [L-A].
Согласно отчета ЦИТИ о проведении Международного семинара
Решение проблем организации автомобильного движения в Центре
Москвы" (г. Москва, 20-21 февраля 2002 г.), " ...
измерение, наблюдение и моделирование крайне важны для
разработки стратегии организации движения". Движение потока
на московсих городских магистралях происходит на стадиях
"синхронного движения" с частыми внезапными переходами к
старт-стоп режиму, причем, пробки "растекаются" по сети
за счет того, что подъезжающие к затору водители разворачиваются
на объездные дороги, на которых в свою очередь возникают новые
заторы. Поэтому актуально моделирование процессов образования и
рассасывания пробок по сети.
Перспективным направлением является применение нейронных сетей.
Например, в работе [Neural] рассматривается
дискретная модель
загрузки сети городских дорог, построенная на взаимодействующих
цепочках нейронных сетей. Авторы моделируют явление затора как
зависимость, связывающую ограничения на входящие и выходящие
транспортные потоки, которая может быть выведена из заданных
времен перемещения по сети. Ограничения на вход в сеть позволили
им получить эффекты обратного распространения заторов (spillback
effects).
Своеобразную исследовательскую программу предлагает в своей
работе [Daganzo] Даганзо: "Я верю, что мы начнем
извлекать наибольшую пользу из концентрации внимания на двух
основных вопросах. Первый - поведение заторных участков.
Второй вопрос посвящен пространственному росту очередей.
Экспериментаторы в настоящее время измеряют такие параметры, как
"загруженность" (occupancy), скорость и поток и
используют эти данные для оценки того, насколько
"хороша" модель. Я бы предпочел измерять параметры, которые
реально должны предсказывать модели - длина очереди, время
проезда транспортного средства между датчиками, и далее,
использовать их для выбора модели".
Заключение
В настоящем обзоре представлены проблемы, связанные с дорожным
движением мегаполисов мира и России. Дан подробный обзор основных
идей и методов в области динамического моделирования транспортных
потоков. Построена математическая модель образования очереди у
однополосного регулируемого перекрестка с однополосным движением.
Автор выражает искреннюю благодарность Георгию Геннадиевичу
Малинецкому за обсуждение содержания и ценные замечания,
способствовавшие значительному улучшению содержания материала
данного обзора.
References
- [Cremer]
- Cremer M., Ludwig J. A fast simulation model for traffic flow on the basis of Boolean operations // Math. Comp Simul. -- 1986. -- V. 28. -- P. 297-303.
- [Chandler]
- Chandler R.E. at al. Traffic dynamics: Studies in car
following // Opreations Research. -- 1958. -- Vol. 6. -- P. 165-185.
- [Chowdhury]
- Chowdhury D., Santen L., Schadschneider A.
Statistical physics of vehicular traffic and some related systems //
Phys. Rep. -- 2000. -- Vol. 329. -- P. 199-329.
- [Daganzo]
- Daganzo C.F. Remarks on Traffic Flow Modeling
and its Applications // Dept. of Civil and Environmental Engeneering
University of California, Berkeley.
- [Gasis]
- Gasis D.C. et al.
Car following theory of steady state flow // Operations Research. -- 1959. -- Vol. 7.
-- P. 499-505.
- [Greenshields]
- Greenshields B.D. A study of traffic capacity //
Proc. (US) highway research. board. -- 1934. -- Vol. 14. -- P. 448--494.
- [Greenberg]
- Greenberg H. An analysis of traffic flow //
Operations Research. -- 1959. -- Vol. 7 . -- P. 79--85.
- [Nagel]
- Nagel K., Wagner R., Woesler R. Still flowing:
Approaches to traffic flow and traffic jam modeling, January 2, 2003.
- [PartHopMod]
- Nagel K. Particle hopping models and traffic flow theory, Los Alamos National Laboratory (Received 12 September
1995).
- [KeRehb]
- Kerner B.S., Rehborn H. Experimental Features
and characteristics of traffic jams // Physical Review E. -- 1996. -- Vol. 53. --
. 2. -- R1297-R1300.
- [Kerner]
- Kerner B.S., Konhдuser P. // Phys. Rev.
E. -- 1993. -- Vol. 48. -- P. R2335; 1994. -- Vol. 50.
- [NagelSchreckenberg]
- Nagel K., Schreckenberg M.
A cellular automation model for freeway traffic // J. Phys. I France. --
1992. -- Vol. 2. -- P. 2221-2229.
- [Kuhne]
- Kьhne R.D., Beckschulte R. // Proceedings of
12th International Symposium on the Theory of Traffic Flow and Transportation,
edited by C.F. Daganzo (Elsevier, Amsterdam, 1993), p. 367.
- [Rodiger]
- Rцdiger M. Master's thesis, University of
Mьnster, 1990 (unpublished).
- [Sick]
- Sick B. Master's thesis, University of Ulm,
1989 (unpublished).
- [Neural]
- Static and Dynamic Traffic Assignment
with Recurrent Neural Networks,
Paul Mathias, Siemens AG, ATD SV PSM, Minich,
and Department of Computer Sciense 4, Aachen University of
Technology
- [Kerner1996]
- Kerner B.S., Rehborn H. // Phys. Rev. E. --
1996. -- Vol. 53. -- P. R4275.
- [SwissKonf]
- 3rd Swiss Transport Research Conference,
Monte Verita / Ascona, March 19-21, 2003,
Traffic Jam Dynamics in Traffic Flow Models, STRC 03 Conference paper.
- [Kikuchi]
- Kikuchi M. et al.
Video presented at TGF'01 in Nagoya, Japan, 2001.
- [Keuhne]
- Kьhne R.D., Beckschulte R. Non-linearity
Stochastics of Unstable Traffic Flow,
Transportation and Traffic Theory // Proceedings of the 12th
International Symposium on the Theory of Traffic Flow and Transportation, Berkeley, California, USA, 21-23 July, 1993.
- [Payne]
- Payne H.J. Models of freeway traffic and
control / Mathematical models of Public Systems.
Ed. Bekey G. A. V. 1 La Jolla, CA: Simulation Council, 1971. P. 51-61.
- [PrigogineAndrews]
- Prigogine I., Andrews F.C. A
Boltsman-like approach for traffic flow // Operations Research. --
1960. -- Vol. 8. -- P. 789-797.
- [PrigHer]
- Prigogine I., Herman R. Kinetic Theory
of Vichicullar Traffic / N.Y.:Elsevier, 1971.
- [Prigogine]
- Prigogine I. A
Boltsman-like approach to the statistical theory of traffic flow /
Theory of Traffic Flow. Ed. Herman R. Amsterdam: Elsevier, 1961.
- [Philips]
- Philips W.F.
A kinetic model for traffic flow with continuum implications // Transp. Plan. Technol.
-- 1979. -- Vol. 5. -- P. 131-138.
- [Krug]
- Krug J., Spohn H. // Phys. Rev. A. -- Vol. 83. -- P. 4271.
- [Binder]
- Binder P.M., Paczuski M., Barma M. // Phys. Rev. E. --
Vol. 49. -- P. 1174.
- [Kerner]
- Kerner B.S. Three-Phase Traffic Theory and Highway Capacity.
- [L-A]
- Studying the ebb and flow of stop-and-go; Los Alamos Lab using cold war tools to scrutinize traffic patterns alan sipress washington post staff writer, Thursday, August 5, 1999, www.science.com
- [Treiterer]
- Treiterer J., Myers J.A., The hysteresis phenomenon
in tfaffic flow / In D.J. Buckley, editor, Proc. 6th ISTT, p. 13,
Artarmon, New South Wales, 1974.
- [WhithamEng1]
- Ligthill M.J., Whitham F.R.S. On kinetic waves II. A theory of traffic flow on crowded roads // Proc. of the Royal Society Ser. A. 1995. -- Vol. 229. -- No. 1178. -- P. 317-345.
- [Proon]
- Проект ПРООН RUS/97/029 "Стратегия развития транспорта г. Москвы. Программа действий и
кратко/среднесрочных инвестиций".
- [Report]
- Отчет о научно-исследовательской работе "Разработка концепции оперативного управления движением на улично-дорожной сети г. Москвы", договор N 10-Тр/02 от 29 июля 2002 г.
- [Inose]
- Х. Иносэ, Т. Хамада Управление дорожным движением //Москва, Транспорт, 1983.
- [Brailov]
- Брайловский Н.О., Грановский Б.И. Моделирование транспортных систем / М.: Транспорт, 1978 - 125 с.
- [Government]
- Постановление Правительства Москвы от 5 декабря 2000 г. N
971 "О мерах по совершенствованию организации дорожного
Движения в городе Москве".
- [msu]
- Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Юмашев М.В.
Математическое моделирование автотранспортных потоков // мех-мат МГУ, 1999.
- [Heit]
- Хейт Ф. Математическая теория транспортных потоков /
М.: Мир, 1966. -- 286 с.
- [Whitham]
- Уизем Дж. Линейные и нелинейные волны // М.: Мир, 1977.
- [Shvetsov]
- Швецов В.И. Математическое моделирование транспортных потоков // Автоматика и телемеханика. -- 2003. -- 11.
|