О возможности достижения астероидов главного пояса космическим аппаратом с ЭРД
|
|
NЭ0 T j MКИД | MКСТ VC MПИД | MПСТ [ Квт ]
[ г. ] [ град ] [ тонны ] [ км/с ] [тонны ] |
|
1. 7.5 3 540 1.202 id 0.753 1.151
16.5 0.692 |
Экспедиции к астероидам Главного пояса с гравитационным
маневром в сфере действия Марса.
Есть два способа заметного
увеличения полезной массы. Первый – использовать гравитационный маневр у Марса.
Второй – увеличить номинальную мощность солнечных панелей.
Использование гравитационного маневра в сфере действия Марса может значительно – иногда в полтора и более раз по сравнению с прямым перелетом от Земли к астероиду – увеличить полезную массу. Некоторые параметры комбинированного перелета к Фортуне представлены в табл.2. Название астероида, его геохимический тип и номер по каталогу даны в первом столбце. Характеристики КА и оптимальной траектории (участка перелета к астероиду) – те же, что и в табл.1 – приведены во втором столбце. Импульс DV большой тяги, прикладываемый у астероида для возврата к Земле, дата начала экспедиции tЗ (старта с Земли), и ее продолжительность TЭ – в третьем столбце. Продолжительность TЭ экспедиции включает в себя время сопровождения астероида космическим аппаратом в ожидании оптимального момента старта к Земле.
В дополнение к ступенчатой программе малой тяги со скоростью истечения VC = 16.5 км/с рассмотрен вариант программы с двумя уровнями скорости истечения: 16.5 км/с и 25 км/с. Дело в том, что ступенчатая модель тяги с одним уровнем скорости истечения может иногда заметно отличаться (в данном случае на 214 кг) по полезной нагрузке от идеальной модели (которая дает верхнюю оценку для возможного значения полезной нагрузки). В то время как модель с двумя уровнями скорости истечения обычно дает очень близкое к идеальному значение доставляемой полезной массы. В рассматриваемом случае разница между двумя программами ступенчатой тяги довольно значительна и составляет 131 кг. Но последний вариант предполагает использование двух типов электроракетных движителей (а проект «Фобос-Грунт» – только одного.)
Таблица 2.
|
N тип |
NЭ0 T j mКИД /mКСТ VC mПИД/mПСТ [
Квт ] [ г. ] [ град ] [ тонны ] [ км/с ]
[ тонны ] |
TЗ ТЭ DV [ г. ] [км/с] |
|
19 C |
7.5
3.3 514 1.541 id 1.160
1.363 16.5 0.946 1.472 16.5+25 1.077 |
02.2093
6.48 4.2 |
Пример оптимального перелета от Земли к Марсу и последующего полета к Фортуне дан на рис. 1. Орбита Земли и траектория КА изображены сплошной линией, орбиты Марса и астероида – пунктиром. Оскулирующая орбита, по которой двигался бы КА без тяги после выхода из сферы действия Марса – жирным пунктиром. Символом α отмечены афелии орбит; Ñ – точки старта с Земли и финиша у Фортуны, Æ – пролета Марса.
Две программы ступенчатой тяги, точнее, величины w = 1/ VC обратной скорости истечения струи, приведены на рис. 2 (а) и (б) сплошными линиями, на них же программа идеальной малой тяги показана пунктиром. Хорошо видно, что ступенчатая программа с двумя уровнями скорости истечения струи гораздо лучше аппроксимирует идеальную программу, чем ступенчатая тяга с одним уровнем VC. И потому дает лучшее значение полезной массы.
Отметим, что данный расчет был выполнен без привязки к конкретному движению планет по их орбитам, что позволяет выявить некоторые качественные характеристики оптимального перелета. Во-первых, видно, что встреча КА с Марсом происходит в окрестности перигелия его орбиты, т.е. в области наибольшего сближения Марса с Землей. Во-вторых, встреча с астероидом происходит практически точно в афелии его орбиты. Оскулирующая орбита после выхода КА из сферы действия Марса занимает промежуточное положение между орбитами Марса и астероида – и по положению линии апсид в пространстве, и по величине средней полуоси.
Попытки привязки оптимальной траектории перелета (между орбитами планет) к реальному движению планет обычно, в случае двух планет, не вызывает больших проблем, так как в случае малой тяги окна старта и финиша шире, чем в случае большой тяги. И потому на отрезке в несколько лет (для даты старта TЗ) удается подобрать параметры TЗ, TА так, что проигрыш в функционале оказывается не слишком большим (при той же примерно продолжительности перелета). Однако в случае трех планет их удачное взаимное положение случается гораздо реже. Так, отношение периодов Фортуны и Марса равно » 2.03, поэтому схожее положение этих двух планет случается раз в 125 лет. Хотя иногда возможен еще один «хороший» вариант расположения трех планет – с перелетом в перигелий астероида, а также возможно повторение старта через 1-2 периода Марса, если астероид при этом еще не сильно сместится от наилучшего положения, в целом возможность перелета к конкретному астероиду случается редко.

Рис. 1. Перелет к астероиду Фортуна космического аппарата с идеальной
малой тягой с гравитационным маневром в сфере действия Марса. Сплошная линия –
орбита Земли и траектория перелета, пунктир – орбиты Марса и астероида, жирный
пунктир – оскулирующая орбита в момент выхода из сферы действия Марса. Через a обозначены апогеи орбит. Параметры
гравитационного поворота: VBX = 2.8 км/с, g = 75o, w = 9.5 o,
минимальная высота пролета над поверхностью Марса 100 км, tM – через 3 недели после прохождения Марсом перигея. Угловые дальности
участков траектории до и после гравитационного маневра соответственно 269o
и 221o, продолжительности перелета – 386 и 675 суток,
суммарная продолжительность полета 2.9 года. Начальная масса КА 1947 кг, масса
у Марса 1810 кг, конечная масса у астероида 1520 кг. Гиперболический избыток
скорости при выходе из сферы действия Земли V¥ = 1.75 км/с.
w = 1/VC [ с/км ]
 (а)
(а)
w = 1/VC [ с/км ]

Рис. 2. Оптимальные программы малой тяги для перелета к астероиду
Фортуна с гравитационным маневром в сфере действия Марса. Сплошная линия –
ступенчатая тяга, пунктир – идеальная тяга. Идеальная программа тяги имеет
разрыв при пересечении (точечной) сферы действия Марса. Начальная масса КА у
Земли mЗ
= 1947 кг. Конечная масса у астероида mАид = 1520 кг – для идеальной модели тяги, mАст = 1363 кг – для
(а) двухступенчатой программы тяги ( w1 = 0, w2 = 0.0606, что соответствует
VC = 16.5 км/с ) и mАст = 1472 кг – для (б)
трехступенчатой программы тяги (w1 = 0, w2 = 0.4, w3 = 0.0606, что соответствует
VC = 16.5 и 25 км/с ).
Поэтому актуальной становится задача поиска других астероидов Главного пояса в качестве целей для космических полетов. Поскольку имеются сотни астероидов с диаметром ³ 50 – 100 км и тысячи более мелких астероидов с достаточно хорошо известными орбитами, удается найти немало интересных вариантов экспедиций. Примеры таких экспедиций приведены в табл. 3,4,5.
Так как великое противостояние Земли и Марса случается раз в 15-17 лет, даты старта этих экспедиций, как видно из таблицы 4, образуют группы с примерно таким же периодом. Было найдено 16 вариантов экспедиций к астероидам (главным образом из первых двух сотен по каталогу, и следовательно, больших по размерам) со стартом в 21 веке. Важно, что этот список включает экспедиции к астероидам всех основных геохимических типов: C,E,I,M,O,S.
В табл. 3 приведены: N – номер астероида по каталогу; тип ( C, E, I, M, O, S, U ) – классификация по составу; D – диаметр планеты;
Таблица 3.
|
N
название тип D a e i w W D T/TЗ T/TМ Rp Ra [км] [град] [град] [млн.км] |
|
Mars 3400 1.52
0.09 1o.8 286
49 0 1.88
1 207 249 11
Parthenope S 150 2.45
0.1 4o.6 94
125 –15 3.84
2.042 330 404 19
Fortuna C 215 2.44
0.16 1o.6 182
211 58 3.82
2.029 307 423 21
Lutetia M 115 2.43
0.16 3o.0 250
80 –5 3.80
2.022 305 424 30
Urania S 91
2.37 0.13 2o.1 86
307 58 3.64
1.936 309 399 32
Pomona S
93 2.59 0.08
5o.5 338 220 –137
4.16 2.111 354
420 64
Angelina E 56
2.68 0.13 1o.3 180
309 153 4.39
2.355 351 452 126 Velleda S
40 2.44 0.11
2o.9 327 23
16 3.81 2.025
326 404 135 Hertha M
78 2.43 0.20
2o.3 339 344
–12 3.79 2.013
289 438 149 Medusa O
16 2.18 0.06
0o.9 250 159
74 3.21 1.705
304 347 177 Irma C 68
2.77 0.24 1o.4 38
347 50 4.61
2.452 317 512 178 Belisana S
39 2.46 0.05
1o.9 211 51
–74 3.86 2.053
352 385 215 Oenone 36 2.77
0.03 1o.7 319
25 06 4.61
2.449 399 429 435 Ella I 32
2.45 0.15 1o.8 333
23 21 3.83
2.038 310
423 969
Leocadia U 18
2.46 0.20 2o.3 91
288 43 3.87
2.055 293 444 |
a, e, i, w, W – параметры орбиты (большая
полуось, эксцентриситет, наклонение, угловое расстояние перицентра от узла,
долгота восходящего узла); D – разность долготы перицентра
планеты и Марса ( » углу между направлениями на
перицентр планеты и Марса);
Rp , Ra – расстояния до перицентра
и апоцентра орбиты планеты; T/TЗ , T/TМ – отношение периода
обращения планеты вокруг Солнца соответственно к периоду Земли и к периоду
Марса.
В таблице 4 приведены следующие характеристики перелетов к астероидам с гравитационным маневром у Марса КА с идеальной МТ:
tЗ – старт с Земли, RM, RA – расстояния до Солнца [в млн. км] в моменты t М, t А пролета СД Марса и встречи с астероидом; DT1, DT2, j1, j2 – продолжительности [в сутках] и угловые дальности участков перелета соответственно от Земли к Марсу и от Марса к астероиду; DTS , jS – продолжительность [в годах] и угловая дальность [в оборотах вокруг Солнца] всего перелета к астероиду; VBX, g , w – величина вектора скорости входа в СД Марса и угол его поворота, а также угол отклонения его от плоскости входа в СД (образованной векторами скорости КА и Марса); MК, MП – конечная масса КА и «полезная» масса MП = MК – 0.3 – 0.2*(M0 – MК ) [в тоннах] у астероида.
Таблица 4.
N тип Название |
t З DT1 [сутки] j1 t М DT2 j2 t А DTS [ г ] jS [об] |
VBX
g w RM RA [км/c] [млн.км] |
MК MП [т]
[т] |
|
11 S
Parthe- nope |
14.11.1996
387 264o 06.12
1997 733 257o 09.12.1999
3.07 1.45 |
2.882
73o 20o.3 208
374 |
1.415 1.009 |
|
64 E Angelina |
30.10.2011 273
196o 29.07.2012 1027
348o 22.05.2015
3.56 1.51 |
3.748 56o
2o.2 231
395 |
1.499 1.109 |
|
32 S Pomona 215 Oenone |
28.01.2016 204
165o 20.08.2016 909
287o 15.02.2019 3.05
1.26 24.02.2016 335
236o 24.01.2017 858
259o 31.05.2019
3.27 1.37 |
5.167
37o 9o.6 212
356 2.949
72o –6o.3 214
404 |
1.330 0.906 1.400
0.990 |
|
30 S Urania 177 C Irma 969 U Leocadia 435 I Ella 178 S Belisana |
18.12.2028 393
262o 15.01.2030 671
234o 17.11.2031 2.91
1.38 15.12.2028 384
257o 03.01.2030 847
233o 28.04.2032 3.37
1.36 08.12.2028 364
247o 07.12.2029 774
252o 20.01.2032 3.12
1.39 15.01.2029 408
260o 28.02.2030 803
273o 11.05.2032 3.32
1.48 26.11.2030 284
229o 06.09.2031 900
285o 22.02.2034
3.24 1.43 |
3.353
63o –11o.1 207
398 3.136
67o –5o.8 207
511 3.225
65o –15o.3 207
439 4.635
43o –8o.8 211
338 3.607
58o 0o.7 212
356 |
1.504 1.115 1.471 1.075 1.523 1.138 1.469 1.073 1.548 1.168 |
|
21 M Lutetia |
02.02.2031 332
233o 01.01.2032 867
283o 17.05.2034
3.28 1.43 |
2.667
79o 3o.3 209
217 |
1.534 1.152 |
|
21 M Lutetia |
09.12.2060 354
248 28.11.2061 791
251 28.01.2064 3.14
1.39 |
2.398
86o 8o.2 207
382 |
1.500 1.111 |
|
178 S Belisana 135 M Hertha – “ – |
29.12.2077
348 253o 12.12.2078
724 274o 04.12.2080 2.93
1.46 26.11.2075
368 252o 28.11.2076
818 256o 24.02.2079
3.25 1.41 29.12.2079
306 255o 30.10.2080
751 215o 20.11.2082
2.90 1.31 |
2.887
73o –9o.2 207
352 2.522
82o –11o.3 208
380 2.381
86o 8o.5 207
385 |
1.440 1.039 1.500 1.111 1.358 0.940 |
|
19 C Fortuna 126 S Velleda 149 O Medusa |
05.02.2093
390 254o 02.03.2094
815 260o 25.05.2096 3.30
1.43 16.12.2092
352 251o 03.12.2093
746 253o 19.12.2095
3.00 1.4 08.12.2092
358 258o 01.12.2093
654 244o 16.09.2095
2.77 1.39 |
4.597 43o 7o.2 214
371 2.643
79o –10o.6 207
383 1.778
105o 65o 207
346 |
1.541 1.160 1.488 1.096 1.323 1.138 |
В таблице 5 даны характеристики возвратного участка экспедиций к астероидам Главного пояса (перелет к астероиду – с идеальной малой тягой на солнечных батареях, возврат к Земле – с большой тягой):
t З – начало экспедиции (год старта с Земли), MП – полезная масса у астероида; DТП – пауза (время ожидания старта с астероида), DТО – продолжительность обратного перелета,
ТЭ
– продолжительность экспедиции; DV – импульс скорости у
астероида для возврата к Земле;
** – нулевое время ожидания; необходимое время для
маневров у астероида и забора грунта может быть получено за счет уменьшения
продолжительности перелета к астероиду (с уменьшением на 2 недели полезная
масса уменьшается на несколько кг);
·
– имеется в виду более короткий
перелет к астероиду – соответственно меньше полезная масса у астероида MП = 1.004 т).
Таблица 5.
|
t З тип
N [г] |
MП [т] |
DТП
D
ТО
ТЭ DV [г]
[г] [г] [км/с] |
DТП DТО ТЭ DV [г]
[г] [г] [км/с] |
|
2011
E 64 |
1.109 |
0.13 1.27 4.95
5.0 |
1.27 1.39 6.22
4.0 |
|
2016
S 32 2016
215 |
0.906 0.990 |
0.61 1.17 4.83
5.4
0.57 1.11 4.94
5.4 |
1.90 1.30 6.25
4.2
1.71 1.24 6.21
5.0 |
|
2028
S 30 2028
C 177 2028
U 969 2029
I 435 2030
S 178 2031
M 21 |
1.115 1.075 1.138 1.073 1.168 1.152 |
–** 1.11 4.04 5.1
– 1.43 4.81
3.5
1.08 0.86 5.05
5.0
0.90 1.05 5.26
5.3
0.79 1.05 5.08
5.1
0.78 1.24 5.31
5.0 |
–0.17*
1.20 3.95 4.3
1.85 1.46 6.59
3.9
2.00 1.20 6.44
4.3
1.77 1.36 6.42
3.7 |
|
2060
– “ – |
1.111 |
2.02 1.39 6.48
4.0 |
|
|
2077
S 178 2075 M
135 2079
– “ – |
1.039 1.111 0.940 |
– 0.98 3.91
5.0
1.77 1.55 6.57
4.0 – 0.86
3.75 4.2 |
1.10 1.27 5.30
4.5
2.09 1.58 6.57
3.6 |
|
2093
C 19 2092
S 126 2092 O 149 |
1.160 1.096 1.138 |
1.79
1.46 6.48 4.2 –
0.98 3.98 5.3 0.10
0.98 3.86 3.9 |
2.22
1.43 6.66 4.5 |
В большинстве случаев приведены два варианта возврата – с разным временем ожидания у астероида удобного момента старта к Земле. Вторые варианты (обычно с большим временем ожидания и соответственно с большей суммарной продолжительностью экспедиции) приведены в том случае, если для них возвратный импульс заметно меньше. Как видно из таблицы, возвратный импульс в «хороших» случаях порядка 4 км/с, в «плохих» – 5 км/с и более. Общая продолжительность экспедиции – от 4 до 6 с половиной лет.
Наконец, в табл. 6 приведены уточненные данные для двух ближайших экспедиций к астероидам Ангелина (№ 64,Е) и Помона (№ 32,S) – и для модели с идеальной малой тягой, и для модели со ступенчатой тягой.
Таблица 6.
|
N тип |
NЭ0 T j mКИД /mКСТ VC mПИД /mПСТ [Квт]
[г]
[град]
[тонны]
[км/с]
[тонны] |
tЗ ТЭ DV [годы] [км/с] |
|
64E 32 S |
7.5 3.56
544 1.499 id 1.009 1.333 16.5 0.910 1.470 16.5+25
1.075 7.5
3.05 452 1.330 id 0.906 1.239 16.5 0.797 1.313 16.5+25
0.886 |
10.2011 6.22
4.0 01.2016 6.25
4.2 |
Экспедиции к Фортуне без гравитационного
маневра у Марса.
В последнее время, благодаря прогрессу в космических технологиях и созданию новых материалов, появляется возможность значительно увеличить мощность солнечных батарей без увеличения их размеров и массы. Представляется реалистичным, что в обозримом будущем удастся увеличить мощность батарей почти в полтора раза – с нынешних 7-7.5 Квт до 10 Квт, а возможно, и вдвое – до 14 Квт. Большая электрическая мощность позволит заметно увеличить полезную нагрузку, доставляемую к астероидам. Так, при мощности батарей в 10 Квт и использовании двух типов электроракетных движителей удается получить дополнительно 150 кг полезной массы в сравнении с мощностью в 7.5 Квт и увеличить ее до почти приемлемой величины в 845 кг (сравни табл.7 и 1).
Увеличение номинальной мощности батарей до 14 Квт позволит значительно расширить возможности новой космический системы и сделает возможными прямые перелеты от Земли ко многим астероидам Главного пояса. В отличие от комбинированной схемы (с гравитационным маневром у Марса), возможность старта для прямого перелета к определенной цели будет повторяться через несколько лет. И поэтому каждый год можно будет найти различные варианты экспедиций к интересным с научной точки зрения астероидам Главного пояса. Два типа астероидов – C и S – представляют особенный интерес для исследований. Астероиды типа C расположены в основном в дальней, более труднодостижимой области Главного пояса. Тем не менее и в ближней части пояса имеется много таких астероидов (так же как и астероидов типа S), приемлемых размеров и с «хорошими» параметрами орбит (эксцентриситетом e < 0.15, наклонением i < 150 и большой полуосью a < 2.5 а.е.). Энергозатраты на перелет к этим астероидам того же порядка, что и к астероиду Фортуна.
Параметры экспедиции к астероиду Фортуна космического аппарата с электрической мощностью солнечных батарей в 14 Квт и датой старта в 2006 году представлены в табл.8. Приведены два варианта обратного перелета к Земле с большой тягой. Один – со стартом от Фортуны в 2010 году, с импульсом большой тяги DV= 4.6 км/с и общей продолжительностью экспедиции ТЭ = 5 лет. Второй – со стартом от Фортуны в 2011 году, с DV= 3.5 км/с и ТЭ = 6.12 лет. Рассмотрены две программы ступенчатой малой тяги. Первая – со скоростью истечения струи VC = 25 км/с. Вторая – с двумя уровнями скорости истечения струи в 25 и 48.3 км/с, дает большее значение полезной массы, но она предполагает использование двух типов электроракетных движителей – российского СПД и немецкого RIT-XX, и могла бы быть предложена для совместного Российско-Европейского проекта.
Таблица 7.
|
NЭ0 T j mКИД | mКСТ VC mПИД | mПСТ [Квт]
[г] [град] [тонны] [км/с] [тонны] |
|
10 2.86 405 1.317 id 0.891 1.279 16.5+ 25 0.845 |
Таблица 8.
|
NЭ0 T j mКИД | mКСТ VC mПИД | mПСТ [Квт]
[г] [град] [тонны] [км/с] [тонны] |
TЗ ТЭ DV [г] [км/с] |
|
14
2.86 405 1.452 id 1.053
1.377 25 0.963
1.444 25+48.3 1.043 |
09.2006
5 4.6 6.12 3.5 |
Заключение
Использование гравитационного маневра в сфере действия Марса или солнечных батарей большой электрической мощности » 14 Квт позволит осуществить экспедиции (с доставкой на Землю образца грунта) ко многим астероидам Главного пояса с помощью космической системы, разрабатываемой в настоящее время в рамках пректа «Фобос-Грунт».
Приложение. Оптимизация перелетов Земля-Марс-астероид с гравитационным маневром в сфере действия Марса.
Схема полета.
Сферы действия Земли и Марса
считаем точечными «извне», то есть их размерами пренебрегаем при расчетах
межпланетных участков, а «изнутри» – бесконечными, то есть оценки скорости
выхода из сферы действия делаем для расстояния r = ¥ . Предполагается, что из
сферы действия Земли КА выводится с помощью традиционного двигателя большой
тяги, и имеет в начале межпланетного перелета гиперболический избыток скорости V¥ = 1.75 км /с
при начальной массе КА m Н = 1.947 т.
Гравитационным влиянием астероида пренебрегаем.
В результате имеем следующие
терминальные условия для траектории: 1) в начальный момент времени t = t З
:
![]() =
= ![]() З,
З, ![]() =
= ![]() З
+ V¥×
З
+ V¥× ![]() ¥,
¥,
где ![]() З,
З,
![]() З
– радиус-вектор и вектор скорости Земли; величина V¥ задана, а ее направление
З
– радиус-вектор и вектор скорости Земли; величина V¥ задана, а ее направление ![]() ¥ должно быть выбрано оптимальным образом;
¥ должно быть выбрано оптимальным образом;
2) в конечный момент времени t = t А:
![]() =
= ![]() А,
А, ![]() =
= ![]() А,
А,
где ![]() А,
А,
![]() А
– радиус-вектор и вектор скорости астероида; это есть условие сопровождения
астероида.
А
– радиус-вектор и вектор скорости астероида; это есть условие сопровождения
астероида.
В схеме полета с
гравитационным маневром добавляются условия оптимального пролета сферы действия
Марса в момент времени t = t М. Выведем эти условия.
 Рис.3.
Рис.3.

Рис.4.
 Рис.5.
Рис.5.
Гравитационный поворот.
Будем исходить из того, что
в сфере действия Марса большая тяга не используется. Далее, поскольку пролет
сферы действия Марса происходит относительно быстро, то влиянием малой тяги на
этом участке можно пренебречь. Будем считать, что малая тяга равна нулю и,
следовательно, движение происходит по гиперболической траектории
(см. рис. 3). Марсоцентрическая скорость входа в сферу действия равна
![]() ВХ
=
ВХ
= ![]() –
–
–
– ![]() М
,
М
,
где ![]() М
и
М
и ![]() –
– соответственно скорость Марса и скорость подлета КА к сфере действия – в
гелиоцентрической системе координат. Марсоцентрическая скорость выхода по
величине равна скорости входа: VВЫХ = VВХ, гелиоцентрическая скорость
КА после прохождения сферы действия:
–
– соответственно скорость Марса и скорость подлета КА к сфере действия – в
гелиоцентрической системе координат. Марсоцентрическая скорость выхода по
величине равна скорости входа: VВЫХ = VВХ, гелиоцентрическая скорость
КА после прохождения сферы действия:
![]() +
=
+
= ![]() ВЫХ +
ВЫХ + ![]() М
.
М
.
Угол поворота g зависит как от скорости входа VВХ , так и от параметра q (рис.
3), который ограничен снизу:
q ³ q min .
Фокальный параметр p гиперболы, ее большая
полуось a, эксцентриситет e и постоянная энергии h
связаны соотношениями
p = a× ( e2 – 1 ) , h = mM / a ,
в которых mM
– гравитационный параметр Марса. Из этих формул и интеграла энергии
V2 – 2×mM / r = h
имеем при r = ¥ :
a = mM / h
= mM / V¥2 = mM / VВХ2 .
Используя формулу для
расстояния
r = ![]() ,
,
при q = 0 получим параметр
q =
r min = ![]() = a×
= a×![]() = a×( e
– 1 ) = ( e – 1 )×mM / VВХ2 ,
= a×( e
– 1 ) = ( e – 1 )×mM / VВХ2 ,
а полагая в ней r = ¥ , получим условие 1 + e×cosq =
0 для максимального угла q. С учетом g + p = 2q (см. рис. 4) для угла g получаем
sin (g/2) = sin (q – p/2) = – sin ( p/2 –
q ) = – cos q = 1 / e ,
g = 2× arcsin (1/e) = 2×
arcsin (![]() ) . (1)
) . (1)
Отметим, что в плоском
случае КА может пролететь также по симметрично расположенной относительно
притягивающего центра гиперболе (рис. 3), поэтому угол g может быть как
положительным, так и отрицательным.
В пространственном случае
множество векторов ![]() ВЫХ образует конус (рис. 5), для описания
которого введем дополнительный угол w . Проектируя вектор
ВЫХ образует конус (рис. 5), для описания
которого введем дополнительный угол w . Проектируя вектор ![]() ВЫХ на тройку ортов {
ВЫХ на тройку ортов { ![]() v ,
v , ![]() n ,
n , ![]() b }, связанную с вектором
b }, связанную с вектором ![]() ВХ и плоскостью {
ВХ и плоскостью { ![]() ВХ
,
ВХ
, ![]() } формулами
} формулами
![]() v =
v = ![]() ВХ
/ VВХ
,
ВХ
/ VВХ
, ![]() n =
n = ![]() ,
, ![]() b =
b = ![]() n ´
n ´ ![]() n ,
n ,
получим
![]() ВЫХ = VВХ × (
ВЫХ = VВХ × ( ![]() v × cos
g +
v × cos
g + ![]() n × sin
g × sin w +
n × sin
g × sin w + ![]() b × sin
g × cos w ),
b × sin
g × cos w ),
или
![]() + =
+ = ![]() М + VВХ × (
М + VВХ × ( ![]() v × cos
g +
v × cos
g + ![]() n × sin
g × sin w +
n × sin
g × sin w + ![]() b × sin
g × cos w ), (2)
b × sin
g × cos w ), (2)
Углы g, w должны быть выбраны оптимальным образом.
Уравнения движения.
![]() =
= ![]() ;
; ![]() =
= ![]() +
+ ![]() ;
; ![]() = – β .
= – β .
Здесь ![]() ,
,
![]() ,
m – радиус-вектор, вектор скорости и масса КА;
,
m – радиус-вектор, вектор скорости и масса КА;
![]() = – mС
= – mС ![]() /
R3
/
R3
–
гравитационное ускорение Солнца;
![]() = P×
= P× ![]() /
m
/
m
– вектор ускорения малой тяги; P,![]() – величина и направление тяги; тяга P и
секундный расход массы β связаны со скоростью струи VC и мощностью в струе NC соотношениями
– величина и направление тяги; тяга P и
секундный расход массы β связаны со скоростью струи VC и мощностью в струе NC соотношениями
P = β ×VC ; NC = β ×VC2 / 2 .
Для солнечных батарей мощность в струе NC зависит от электрической мощности батарей NЭ (на расстоянии одной
астрономической единицы I » R З ) и от расстояния КА до Солнца R. Используем приближенную
формулу
NC
= k× NЭ / ( R / I ) S ,
где k = const – к.п.д. двигательной установки, показатель
степени s » 2 (в расчетах принято k = 0.5, s =
1.7).
Обозначая через w º 1/ VC величину, обратную скорости
истечения струи, а через N º 2× k× NЭ / a S
, получим уравнения движения в виде
![]() =
= ![]() ;
; ![]() =
= ![]() + Nw ×
+ Nw × ![]() / (m ×R S ) ;
/ (m ×R S ) ; ![]() = – Nw2 / R S . (3)
= – Nw2 / R S . (3)
Обозначая
через
![]() = {
= {![]() ,
,
![]() ,
m }
,
m }
вектор фазовых переменных, через
![]() = {
= { ![]() ,
N ,w }
,
N ,w }
вектор
управления, через
![]() (
(![]() ,
,
![]() )
)
правые
части уравнений (3), а через
G( ![]() ,
g, w )
,
g, w )
–
правую часть формулы (2), получим задачу максимизации функционала
L0
= mA
при
дифференциальных связях
![]() =
= ![]() (
(![]() ,
,
![]() ),
),
фазовом ограничении
q ³ q min (4)
при пролете сферы действия
Марса,
терминальных
условиях:
1) в начальный момент времени t = t З
:
![]() =
= ![]() З,
З, ![]() =
= ![]() З
+ V¥ ×
З
+ V¥ × ![]() ¥,
¥,
2) в конечный момент времени t = t А:
![]() =
= ![]() А,
А,
3) в момент пролета сферы действия Марса t = t М:
![]() –
=
–
= ![]() М,
М, ![]() +
=
+
= ![]() М,
М, ![]() +
= G(
+
= G( ![]() ,
g, w ), (5)
,
g, w ), (5)
и ограничениях на управляющие функции:
![]() Î U,
Î U,
где U:
0 ≤ N ≤ Nmax,
w > 0 – для модели
идеальной малой тяги,
w Î { w1} или w Î { w1, w2 }, ( все wi > 0 ) – для модели ступенчатой тяги;
на направление тяги ![]() никаких ограничений не накладывается.
никаких ограничений не накладывается.
Условия
оптимального движения
Для определения оптимальных
программ управляющих функций и значений параметров сформируем Лагранжиан задачи
L. Обозначим через ![]() вектор сопряженных переменных:
вектор сопряженных переменных:
![]() = {
= {![]() R,
R, ![]() V, lm } .
V, lm } .
L = l0×mA + ![]()
![]() (
(![]() –
– ![]() ,
, ![]() ) dt +
) dt + ![]()
![]() (
(![]() –
– ![]() ,
, ![]() ) dt ®
max,
) dt ®
max,
где l0 > 0.
Проварьируем Лагранжиан в предположении, что все три момента времени фиксированы:
dL = l0×dmA + ![]()
![]() (d
(d![]() – d
– d![]() ,
, ![]() ) dt +
) dt + ![]()
![]() (d
(d![]() – d
– d![]() ,
, ![]() ) dt
.
) dt
.
Используя формулу интегрирования по частям:
![]()
![]() ( – d
( – d![]() ,
, ![]() ) dt =
) dt = ![]()
![]() ( –
( – ![]() (d
(d![]() )dt,
)dt, ![]() ) =
) = ![]()
![]() ( – d (d
( – d (d![]() ),
), ![]() ) =
) =
= (d![]() ,
, ![]() )
) ![]()
![]() +
+ ![]()
![]() (d
(d![]() ,
, ![]() ) dt ,
) dt ,
получим:
dL = l0×dmA + (d![]() ,
, ![]() )
) ![]()
![]() + (d
+ (d![]() ,
, ![]() )
) ![]()
![]() +
+
+ ![]()
![]() (du
(du![]() ,
, ![]() ) dt +
) dt + ![]()
![]() ((
((![]() )*×
)*×![]() +
+ ![]() , d
, d![]() ) dt.
) dt.
Из условия максимума Лагранжиана
dL = 0
( в более общем виде dL £ 0 ) получим
дифференциальные уравнения для сопряженных переменных
![]() = – (
= – (![]() )*×
)*×![]() ,
,
или, в развернутом виде:
![]() R = –
R = – ![]()
![]() V +
V + ![]() ( (
( (![]() ,
, ![]() V) – lm×w );
V) – lm×w ); ![]() V = –
V = –![]() R;
R; ![]() m =
m = ![]() (
(![]() ,
, ![]() V) . (6)
V) . (6)
Рассмотрим различные группы
слагаемых, которые входят в первые три члена в выражении для dL.
Объединяя слагаемые с одинаковыми значениями вариаций, получим терминальные
условия и условия стыковки для сопряженных переменных.
1.
(lm, dm)ú![]() – (lm, dm)
– (lm, dm) ![]() + (lm, dm)
+ (lm, dm) ![]() – (lm, dm)
– (lm, dm) ![]() + l0×dmA ;
+ l0×dmA ;
учитывая, что dm ( tЗ ) = 0, а dm ( tM + 0) = dm ( tM – 0) (как указывалось выше, мы исходим из того, что сферу действия
Марса КА проходит с нулевой тягой), получим
lm ( tM + 0) = lm ( tM – 0), lm ( tA ) = l0 > 0;
lm ( tЗ ) – ", (7)
(т.е. lm
( tЗ
) – произвольно).
2.
(![]() R, d
R, d![]() )ú
)ú![]() – (
– (![]() R, d
R, d![]() )
) ![]() + (
+ (![]() R, d
R, d![]() )
) ![]() – (
– (![]() R, d
R, d![]() )
) ![]() ;
;
поскольку все радиус-векторы фиксированы, то
d![]() ( tЗ ) = d
( tЗ ) = d![]() ( tM – 0) = d
( tM – 0) = d![]() ( tM + 0) = d
( tM + 0) = d![]() ( tA ) = 0
( tA ) = 0
(здесь имеется в виду, что равны нулю все три
компоненты векторов d![]() ),
и, следовательно,
),
и, следовательно,
![]() R ( tЗ ),
R ( tЗ ), ![]() R ( tM – 0),
R ( tM – 0), ![]() R ( tM + 0),
R ( tM + 0), ![]() R ( tA ) – ".
R ( tA ) – ".
Аналогичным образом получим терминальные условия для
![]() V.
V.
3.
(![]() V, d
V, d![]() )ú
)ú![]() – (
– (![]() V, d
V, d![]() )
)
![]() + (
+ (![]() V, d
V, d![]() )
)
![]() – (
– (![]() V, d
V, d![]() )
)
![]() .
.
В конечный момент времени ![]() V ( tA ) – ",
V ( tA ) – ",
поскольку d![]() (
tA ) = 0.
(
tA ) = 0.
В начальный момент времени
d![]() = V¥ × d
= V¥ × d![]() ¥ .
¥ .
Условие (![]() V, V¥ × d
V, V¥ × d![]() ¥ ) = 0 есть условие максимума по
¥ ) = 0 есть условие максимума по ![]() ¥ выражения
¥ выражения
(![]() V, V¥ ×
V, V¥ × ![]() ¥ ) .
¥ ) .
Максимум достигается, когда
единичный вектор ![]() ¥ параллелен вектору
¥ параллелен вектору ![]() V, т.е.
V, т.е. ![]() ¥ =
¥ = ![]() V /ú
V /ú ![]() Vú . (8)
Vú . (8)
Оптимальный
пролет сферы действия Марса.
При пролете сферы действия Марса
d![]() +
=
+
= ![]() d
d![]() –
+
–
+ ![]() dg +
dg + ![]() dw .
dw .
Вариация dg зависит от того, является ли g: а) независимой переменной, или б) она связана
условием q º q min
. Рассмотрим первый случай.
Этот случай имеет место либо
когда ограничение q ³ q min
вообще не накладывается, либо оно оказывается несущественным. В этом случае
вариации d![]() –,
dg и dw являются независимыми.
–,
dg и dw являются независимыми.
Полагая d![]() –
= 0 и dg = 0, получим условие оптимальности параметра
w в виде
–
= 0 и dg = 0, получим условие оптимальности параметра
w в виде
(![]() V + ,
V + , ![]() )
= 0 ,
)
= 0 ,
которое фактически означает требование
![]() (
(
![]() V + , G )
.
V + , G )
.
В предположении sin g > 0 оно сведется к
![]() ( sin w × (
( sin w × (![]() V +,
V +, ![]() n ) + cos w × (
n ) + cos w × (![]() V +,
V +, ![]() b ) ) .
b ) ) .
Последнее выражение достигает максимума, когда
вектор < sin w , cos w > параллелен вектору
< (![]() V +,
V +, ![]() n ) , (
n ) , (![]() V +,
V +, ![]() b ) >, т.е. при
b ) >, т.е. при
sin w = (![]() V +,
V +, ![]() n ) ¤ lw
, cos
w = (
n ) ¤ lw
, cos
w = (![]() V +,
V +, ![]() b ) ¤ lw , (9)
b ) ¤ lw , (9)
где через lw обозначено
lw = ( (![]() V +,
V +, ![]() n )2 + (
n )2 + (![]() V +,
V +, ![]() n ) 2 )0.5 .
n ) 2 )0.5 .
Аналогичным образом, полагая
d![]() –
= 0 и dw = 0, получим условие оптимальности параметра
g в виде
–
= 0 и dw = 0, получим условие оптимальности параметра
g в виде
(![]() V + ,
V + , ![]() )
= 0 ,
)
= 0 ,
или
![]() (
( ![]() V + , G ) ,
V + , G ) ,
т.е.
![]() ( sin g ×lw + cos g × (
( sin g ×lw + cos g × (![]() V +,
V +, ![]() v ) ) .
v ) ) .
Þ sin g = lw ¤ lg , cos g = (![]() V +,
V +, ![]() v ) ¤ lg , (10)
v ) ¤ lg , (10)
где через lg обозначено
lg = ( lw2 + (![]() V +,
V +, ![]() v )2 )0.5 .
v )2 )0.5 .
Отметим, что полученные
значения (w, g) доставляют ![]() (
(
![]() V + , G
), поскольку sin g ³ 0. Если предположить sin g < 0, то получим другое
решение (w,g), которому соответствует движение по
симметричной относительно гравитационного центра гиперболе, причем сама
гипербола будет повернута на 1800 по углу w, так что фактически будет реализовано то же
самое прохождение сферы действия Марса, что и в первом случае.
V + , G
), поскольку sin g ³ 0. Если предположить sin g < 0, то получим другое
решение (w,g), которому соответствует движение по
симметричной относительно гравитационного центра гиперболе, причем сама
гипербола будет повернута на 1800 по углу w, так что фактически будет реализовано то же
самое прохождение сферы действия Марса, что и в первом случае.
Наконец, полагая dg = 0, dw = 0, получим условие скачка для ![]() V :
V :
![]() V – = (
V – = (![]() V + ,
V + , ![]() )
, (11)
)
, (11)
или
![]() V –
=
V –
= ![]() V +
cos g + sin g sin w [ (
V +
cos g + sin g sin w [ (![]() V +,
V +, ![]() n )
n ) ![]() v + VВХ ×(
v + VВХ ×(![]() М ×
М ×![]() V +) / d] +
V +) / d] +
+ [ sin g sin w VВХ ×(![]() V +,
V +, ![]() n ) + sin g cos w VВХ ×(
n ) + sin g cos w VВХ ×(![]() V +,
V +, ![]() b )] ×
b )] ×
×[ (![]() –,
–,![]() ВХ
) × (
ВХ
) × (![]() –
+
–
+ ![]() ВХ)
–
ВХ)
– ![]() –×VВХ2 –
–×VВХ2 – ![]() ВХ×(
ВХ×(![]() –)2]
/ d2
+
–)2]
/ d2
+
+ [ ![]() V + (VВХ2 – (
V + (VВХ2 – (![]() –,
–,![]() ВХ)
) + 2(
ВХ)
) + 2(![]() V +,
V +,![]() –
) ×
–
) ×![]() ВХ – (
ВХ – (![]() V +,
V +,![]() ВХ
) × (
ВХ
) × (![]() –
+ ×
–
+ ×![]() ВХ)
]×
ВХ)
]×
×sin g cos w / d , (12)
где
обозначено d = |![]() ВХ
×
ВХ
×![]() –|
– модуль векторного произведения.
–|
– модуль векторного произведения.
Рассмотрим второй случай –
когда g не может рассматриваться в
качестве независимой переменной, поскольку связана условием q º q min, и зависит от ![]() –.
–.
В этом случае в условии скачка для ![]() V появляются дополнительные слагаемые:
V появляются дополнительные слагаемые:
![]() V –
=
V –
= ![]() V +
cos g + sin g sin w [ (
V +
cos g + sin g sin w [ (![]() V +,
V +, ![]() n )
n ) ![]() v + VВХ ×(
v + VВХ ×(![]() М ×
М ×![]() V +) / d] +
V +) / d] +
+ [ sin g sin w VВХ ×(![]() V +,
V +, ![]() n ) + sin g cos w VВХ ×(
n ) + sin g cos w VВХ ×(![]() V +,
V +, ![]() b )] ×
b )] ×
×[ (![]() –,
–,![]() ВХ
) × (
ВХ
) × (![]() –
+
–
+ ![]() ВХ)
–
ВХ)
– ![]() –×VВХ2 –
–×VВХ2 – ![]() ВХ×(
ВХ×(![]() –)2]
/ d2
+
–)2]
/ d2
+
+ [ ![]() V + (VВХ2 – (
V + (VВХ2 – (![]() –,
–,![]() ВХ)
) + 2(
ВХ)
) + 2(![]() V +,
V +,![]() –
) ×
–
) ×![]() ВХ – (
ВХ – (![]() V +,
V +,![]() ВХ
) × (
ВХ
) × (![]() –
+ ×
–
+ ×![]() ВХ)
]×
ВХ)
]×
×sin g cos w / d + (12’)
+ [ cos g ×![]() ВХ×( sin w ×(
ВХ×( sin w ×(![]() V +,
V +, ![]() n ) + cos w ×(
n ) + cos w ×(![]() V +,
V +, ![]() b ) ) – sin g (
b ) ) – sin g (![]() V +,
V +,![]() ВХ)] ×
ВХ)] ×![]() ,
,
где из (1): ![]() =
– sin( g/2 ) ×tg( g/2 ) ×4qmin×VВХ/mM
.
=
– sin( g/2 ) ×tg( g/2 ) ×4qmin×VВХ/mM
.
Оптимальное управление.
В результате условие
максимума лагранжиана сводится к
dL = ![]()
![]() (du
(du![]() ,
, ![]() ) dt = 0 ( £0 ),
) dt = 0 ( £0 ),
которое фактически есть хорошо знакомое условие максимума
гамильтониана
H º (![]() ,
, ![]() )
) ![]() max ,
max ,
или
N [ (![]() ,
,![]() V) ×w/m
– lm×w2 ] ® max
. (13)
V) ×w/m
– lm×w2 ] ® max
. (13)
Сначала рассмотрим случай | V | ¹ 0.
V | ¹ 0.
Из (13) следует, что оптимальное направление
тяги должно быть параллельно вектору V :
![]() =
= ![]() V / |
V / |![]() V | . (14)
V | . (14)
Оптимальные значения N, w для модели ступенчатой
малой тяги определяются непосредственно из условия (13).
Для модели идеальной малой тяги необходимо выяснить,
каков знак величины lm,
и как она изменяется на траектории. На правом конце lm( tA ) = l0 > 0 (7), и,
соответственно, оптимальное w :
w = |![]() V | / (2m×lm) (15)
V | / (2m×lm) (15)
(если
только |![]() V | ¹ 0).
V | ¹ 0).
Из
уравнений оптимального движения имеем:
![]() (m2×lm) = 2m×lm×
(m2×lm) = 2m×lm×![]() m + m2×
m + m2×![]() lm =
lm =
= – 2m×lm×Nw2 / R S + m2×![]() (
(![]() ,
, ![]() V) = 0. (16)
V) = 0. (16)
Отсюда следует, что во все время движения величина lm остается положительной, а
потому формула (15) верна на всей траектории, где |![]() V | ¹ 0. Тогда в (13)
V | ¹ 0. Тогда в (13)
[ (![]() ,
,![]() V) ×w/m
– lm×w2 ] = |
V) ×w/m
– lm×w2 ] = |![]() V |2 / (4m×lm) > 0 .
V |2 / (4m×lm) > 0 .
При этом оптимальное N :
N = Nmax . (17)
Если в какой-либо момент
станет |V | = 0, и, значит V = 0,
то, поскольку w > 0,
из
N [ – lm×w2 ] ® max
следует N = 0 .
Причем |![]() V | = 0 возможно лишь в отдельных точках
траектории, в которых
V | = 0 возможно лишь в отдельных точках
траектории, в которых ![]() R ¹ 0. Если одновременно
R ¹ 0. Если одновременно ![]() V = 0
и
V = 0
и ![]() R = 0
в какой-либо точке траектории, то, как следует из уравнений движения,
тождественно будет выполняться
R = 0
в какой-либо точке траектории, то, как следует из уравнений движения,
тождественно будет выполняться ![]() V º
0,
V º
0, ![]() R º
0, N º 0 на
всем отрезке непрерывности вектора
R º
0, N º 0 на
всем отрезке непрерывности вектора ![]() V. Это случай движения без малой тяги,
который если и возможен, то лишь для отдельных наборов значений параметров { t З , t M , t A
}, т.е. при особом расположении планет (в дальнейшем такие случаи рассматривать
не будем).
V. Это случай движения без малой тяги,
который если и возможен, то лишь для отдельных наборов значений параметров { t З , t M , t A
}, т.е. при особом расположении планет (в дальнейшем такие случаи рассматривать
не будем).
Отметим, что с точки зрения
простоты математической модели удобно расширить множество значений w,
добавив к ним нулевое значение. Т.е. в случае идеальной тяги считать w ³ 0, а в случае ступенчатой
вместо w Î { w1} или w Î { w1, w2 } соответственно w Î { 0, w1 } или w Î { 0, w1, w2 }. Тогда можно положить N º Nmax . Пассивному полету будет
соответствовать N = Nmax, w = 0.
Задача
оптимизации.
Задачу оптимизации
будем решать в два этапа.
Сначала, с использованием модели идеальной малой тяги, рассмотрим задачу оптимизации перелетов Земля – Марс – астероид в целом, а затем, используя модель ступенчатой тяги, уточним параметры траектории для конкретного перелета.
Основную оптимизационную
задачу разделим на две: внутреннюю – решение краевой задачи для заданных
значений параметров { t З , t M
, t A }, и внешнюю – поиск
оптимальных значений этих параметров. Организовать итерационный поиск
оптимальных параметров возможно только в тех областях пространства параметров,
в которых существует решение краевой задачи. Для модели ступенчатой тяги это
очень затруднительно, поскольку из-за ограниченности ступенчатой тяги такие
области, если и существуют (для конкретного астероида), то очень ограниченны. А
для большинства астероидов Главного пояса их просто не существует. В отличие от
ступенчатой тяги идеальная малая тяга – неограниченна, и поэтому решение, в
принципе, должно существовать для любых наборов параметров { t З , t M
, t A }. Хотя, конечно, и в этом случае решение краевой
задачи представляет немалые трудности, и практически ее удается решать только в
случае «удачного» взаимного расположения трех планет, и при наличии «хорошего»
начального приближения для краевой задачи – обычно какого-либо уже найденного
решения для астероида с близкими значениями параметров орбиты.
Краевая
задача.
Для идеальной малой тяги уравнения движения (3), (6) с учетом (14), (15), (17) приводятся к виду:
![]() =
= ![]() ;
; ![]() =
= ![]() + Nmax×
+ Nmax×![]() V / (2m2 ×lm ×R S) ;
V / (2m2 ×lm ×R S) ; ![]() = – Nmax×|
= – Nmax×|![]() V|2 /(4m2 ×lm2×R S);
V|2 /(4m2 ×lm2×R S);
![]() R = –
R = – ![]()
![]() V +
V + ![]() Nmax×|
Nmax×|![]() V|2 /(4m2×lm);
V|2 /(4m2×lm); ![]() V = –
V = –![]() R;
R; ![]() m = Nmax×|
m = Nmax×|![]() V|2 /(2m3 ×lm×R S).
V|2 /(2m3 ×lm×R S).
Эту систему можно упростить,
если учесть, что m2×lm
= const (16), и что сопряженные переменные определены с точностью до
произвольного положительного множителя, который можно выбрать так, чтобы
выполнялось условие m2×lm
= Nmax/2. В результате система уравнений преобразуется к
виду:
![]() =
= ![]() ;
; ![]() =
= ![]() +
+ ![]() V / R S
;
V / R S
; ![]() R = –
R = – ![]()
![]() V +
V + ![]() ×s×|
×s×|![]() V|2 /(2RS+2);
V|2 /(2RS+2); ![]() V = –
V = –![]() R ; (18)
R ; (18)
![]() = – |
= – |![]() V|2 ×m2 /(Nmax×RS) . (19)
V|2 ×m2 /(Nmax×RS) . (19)
Таким образом, мы получили
хорошо известное для модели идеальной малой тяги разделение оптимизационной
задачи на траекторную и массовую, что позволяет понизить размерность краевой
задачи. При ее формировании будем рассматривать только уравнения (18) (без
уравнения (19) для массы m).
Краевая задача в рассматриваемом
случае является трехточечной, и может быть сформирована различными способами.
Причем обычный вариант, при котором траектория интегрируется от начала и до
конца с требованием обеспечить выполнение условий в моменты времени t M , t A , неудобен тем, что малые
вариации переменных в начальный момент времени из-за наличия гравитационного
маневра приводят к очень большим вариациям в конечный момент времени.
Менее капризная краевая
задача получается, если разбить траекторию полета на два участка: перелет от Земли
к Марсу, и перелет «в обратном времени» от астероида к Марсу, со сшивкой их на
сфере действия (рис. 6). Тем более, что в конечный момент времени tA полностью определены
фазовые переменные ![]() ,
,![]() ,
а опыт решения двухточечной краевой задачи [4] позволяет получить приемлемое
начальное приближение для организации итерационного процесса решения трехточечной
краевой задачи.
,
а опыт решения двухточечной краевой задачи [4] позволяет получить приемлемое
начальное приближение для организации итерационного процесса решения трехточечной
краевой задачи.
Итак, необходимо найти значения 12 сопряженных переменных
![]() R (tЗ),
R (tЗ), ![]() V (tЗ), и
V (tЗ), и ![]() R (tM),
R (tM), ![]() V (tM),
V (tM),
которые при
![]() (tЗ) =
(tЗ) = ![]() З,
З, ![]() (tЗ) =
(tЗ) = ![]() З + V¥ ×
З + V¥ × ![]() V /ú
V /ú ![]() Vú ,
Vú , ![]() (tA) =
(tA) = ![]() A,
A, ![]() (tA) =
(tA) = ![]() A
A
обеспечили ли бы выполнение условий (5,11):
![]() –
=
–
= ![]() М,
М, ![]() +
=
+
= ![]() М,
М, ![]() +
= G(
+
= G( ![]() ,
g, w ),
,
g, w ), ![]() V – = (
V – = (![]() V + ,
V + , ![]() )
,
)
,
где w удовлетворяет (9).
Остается только
определиться с g
и ограничением (4). Отметим, что для конкретных значений параметров { t З , t M , t A }
это ограничение может быть несущественным. Поэтому после интегрирования обеих
частей траектории необходимо определить два значения угла g:
одно – из условия (1) с q=qmax, второе – из
(10), и использовать меньшее значение в формулах (1) и (11). Соответственно
выбрать (12) или (12’) для сопряжения ![]() V – и
V – и ![]() V + .
V + .
Поскольку мы
рассматриваем оптимизационную задачу шире – варьируем также параметры { t З , t M , t A
}, логично предположить, что в таком случае оптимальное решение должно в
максимальной степени использовать возможности гравитационного маневра. А т.к.
гравитационное поле Марса относительно слабое, то почти наверняка оптимальная
траектория выйдет на ограничение (4). Раз так, можно ограничиться выбором g из
(1), тем самым упростив вычислительный процесс. И лишь после нахождения
«оптимального решения» осуществлять проверку того, действительно ли для него
выполнено условие оптимальности по g.
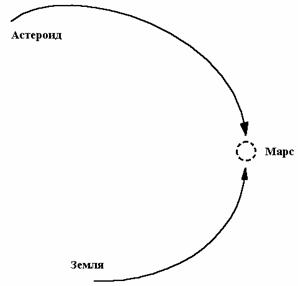 Рис.
6.
Рис.
6.
Полеты к астероидам и
кометам с идеально регулируемой малой тягой.
Оценка
достижимости при различной мощности солнечных батарей.
Известно, что в случае
идеально регулируемой малой тяги (МТ) с постоянной мощностью NC [6] возможен пересчет массовых характеристик полета КА с
МТ на другие параметры аппарата и энергетической установки. По известной
величине затрат J*, его начальной массе M0 и эффективной мощности
энергоустановки «в струе» NC величина MK в конце полета вычисляется по формуле
MK
= MO / (1+n), n =
J* MO /2 NC , MП = MK – MБ
– MБЛ , (20)
где MPT – масса затрат рабочего
тела на полет, MБ – масса баков, MБЛ – масса блока с ЭРД вместе с
СБ. Используя это свойство полетов КА с МТ, удается получить оценки для возможностей
полетов к астероидам с центральной части Главного пояса. Для досчетов были
взяты полеты КА с МТ и СБ к ряду астероидов [9] с разнообразными параметрами
орбит, представленными в табл. 9.
Таблица 9. Характеристики орбит целей полета.
|
Астероид а e i D T цели, близкие по параметрам а.е. град км годы орбиты 19 Фортуна 2.44 0.16 1.5 99 3.80 Веста, Флора, Лютеция, Ниса 3 Юнона 2.67 0.26 13 124 4.34 Ио, Сива, Жуева, Евномия 4 Веста 2.36 0.09 7 288 3.64 Массалия, Немауза, Метиса 6 Геба 2.42 0.20 14.8 102 3.77 Ирида, Виктория Мельпомена 10 Гигея 3.13 0.12 3.8 215 5.55 Церера, Психея, Европа, Фисба комета Копф 3.45 0.54 4.7 6.43 Кларк, Чурюмов-Герасименко |
Параметры КА с МТ при
досчете принимались близкими к параметрам КА, разрабатываемого в рамках проекта
«Фобос-Грунт»: масса в начале межпланетной траектории M0 = 2000 кг при V¥ = 1 км/с (1800 кг при V¥ = 3 км/с), MБЛ = 320 кг, MБ = 0.2 MPT . Рассмотрены варианты мощности
СБ – эффективной «в струе» NC = 5,7,10 Квт при
электрической NЭ = 10, 14, 20 Квт, – в полтора, два и три раза выше,
чем стандартная мощность КА в проекте «Фобос-Грунт». Результаты расчетов собраны
в таблице 10.
Как видно из таблицы, для полетов к астероидам средней части Главного пояса (Юнона и Геба), приемлемые для экспедиции величины полезной массы у цели (около 900 кг) удается получить при = 7 Квт. Для дальней части пояса (астероид Гигея) даже при = 10 Квт (в три раза выше, чем проектируемая) полезная масса недостаточна для осуществления экспедиции и доставки образца вещества, учитывая большую, чем у Фортуны, величину импульса у астероида, нужную для старта возвращаемой ракеты.
Дополнительные возможности для реализуемости
экспедиции, как было показано выше, может дать использование гравитационного маневра
у Марса.
Таблица 10.
Оценки возможностей полетов КА с ЭРД к астероидам и
кометам при
различных величинах Nэл электрической мощности
солнечных батарей.
_________________________________________________________________________________________________________
цель to T j J* Nс Nэл Mo Mк Mп
полета годы рад м2/с3 kW kW кг кг кг
_________________________________________________________________________________________________________
Земля- 5.2001 1.5 4.4 4.0 3.5 7.0 1800 845 333
Фортуна 5.0 10.0 1800 1004 525
7.0 14.0 1800 1190 778
_________________________________________________________________________________________________________
Земля-Гигея 4.1999 3.0 5.2 4.6 5.0 10. 1800 985 502
7.0 14. 1800 1130 677
10.0 20. 1800 1272 846
_________________________________________________________________________________________________________
Земля-Веста 6.2002 2.5 6.1 3.0 5.0 10. 1800 1170 723
7.0 14. 1800 1300 879
6.2002 2.0 4.6 3.3 5.0 10. 1800 1130 675
7.0 14. 1800 1264 836
7.2002 2.0 4.7 4.1 7.0 14. 2000 1261 793
_________________________________________________________________________________________________________
Земля-Геба 8.2000 2.5 6.7 4.0 7.0 14. 1800 1189 746
10.0 20. 1800 1324 908
8.2000 3.0 8.1 3.4 7.0 14. 1800 1252 823
10.0 20. 1800 1378 974
________________________________________________________________________________________________________
Земля- 2.2000 2.5 7.1 4.8 7.0 14. 1800 1113 655
Юнона 10.0 20. 1800 1257 828
9.1999 3.0 9.6 3.3 7.0 14. 1800 1264 836
10.0 20. 1800 1388 985
________________________________________________________________________________________________________
Земля- 7.2000 2.5 6.6 3.6 5.0 10. 1800 1092 630
комета 7.0 14. 1800 1230 796
Копф 10.0 20. 1800 1360 951
7.2000 2.75 7.6 2.9 7.0 14. 1800 1311 893
Проведем оценки для полетов к рассмотренным астероидам и комете КА с ЭРД и пертурбационным маневром у Марса. Используя формулы (12), можно вычислить затраты J*, которые соответствуют тому или другому варианту полета. Вариантам полетов к Фортуне с различной мощностью Nэл = 7.5-14 kW (без маневра у Марса), собранным в табл.2,7,8, соответствуют значения J*= 2.49, 2.59, 2.65 м2/с3 , вариант полета с маневром (табл.4) имеет J*=1.12 м2/с3 . Оценим выигрыш при использовании маневра у Марса величиной DJ* = 1.2 м2/с3 (с запасом), и проведем досчеты для полетов к астероидам и кометам с величинами J** =J* - DJ*. Результаты досчетов собраны в табл.11. Полеты к Фортуне и близкий по достижимости полет к Весте рассмотрены выше и здесь не оцениваются
Таблица 11. Оценки для полетов КА с ЭРД с пертурбационным маневром.
|
вариант to T j J** Nc Nэл Mo Mk Mn цель годы рад м2/с3 kW kW кг кг кг Гигея 4.1999 3.0 5.2 3.4 7.0 14. 1800 1252 823 Геба 8.2000 2.5 6.7 2.8 7.0 14. 1800 1324 908 8.2000 3.0 8.1 2.2 5.0 10. 1800 1209 865 7.0 14. 1800 1403 1004 Юнона 2.2000 2.5 7.1 3.6 7.0 14. 1800 1230 796 9.1999 3.0 9.6 2.1 5.0 10. 1800 1306 877 7.0 14. 1800 1417 1021 Копф 7.2000 2.5 6.6 2.4 5.0 10. 1800 1257 828 7.2000 2.75 7.6 1.7 3.5 7. 1800 1252 823 |
Из табл.11 видно, что использование пертурбационного маневра существенно расширяет достижимость астероидов с разными типами орбит.
Эффективность использования
пертурбационного маневра у Марса при полете к астероидам может быть заметна
улучшена. Известно, что многие астероиды Главного пояса образуют семейства,
члены которых имеют достаточно близкие элементы орбит и, вероятно, являются
осколками общего «родительского» небесного тела. Вероятно, и состав членов
семейства достаточно близок и содержит реликтовое вещество, сохранившееся в
слабо измененном виде со времени образования планет. Главной трудностью
использования пертурбационного маневра, как видно из табл.3, является близость
синодических периодов тел перелетов Земля-Марс и Марс-Астероид. Из-за их
совпадения окна старта Земля-Марс-Астероид разнесены на десятки лет. Если для
астероидов семейства рассмотреть некую среднюю орбиту, достаточно близкую
орбитам членов семейства, то астероиды с учетом фазы будут расположены в каждый
момент во многих областях ее. Поэтому для каждого окна старта перелета
Земля-Марс с большой вероятностью найдется член семейства астероидов,
подходящий для перелета Марс-Астероид. Поскольку орбиты членов семейства
близки, – трудности из-за близости синодических периодов для перелетов
Земля-Марс и Марс-Астероид в большой степени снимаются.
Литература.
1. T.M.Энеев, Н.Н.Козлов.
Модель аккумуляционного процесса форми-рования планетных систем. I. Численные
эксперименты. Астрон. вестник. 1981, т.15, N2, 80-94. II. Вращение планет и
связь с теорией гравита-ционной неустойчивости. Астрон. вестник.1981, т.15, N3,
131-141.
2. T.M.Энеев. Новая
аккумуляционная модель формирования планет и структура внешних областей
Солнечной системы. Препринт ИПМ им. М.В. Келдыша АН СССР, 1979 N 166. О
возможной структуре внешних (занептунных) областей Солнечной системы. Письма в
Астрон.журнал. 1980, т.6, N.5, pp.295-303.
3. С.И.Ипатов. Миграция
небесных тел в Солнечной системе. М.,2000.318 с.
4. В.С.Авдуевский, Э.Л.Аким,
Р.С.Кремнев, С.Д.Куликов, М.Я.Маров, К.М.Пичхадзе, Г.А.Попов, Т.М.Энеев.
Космический проект «Фобос-Грунт»: основные характеристики и стратегия
развития. Космонавтика и ракетостроение. 2000, Т.19, 8–21.
5. Т.М.Энеев, Х.В.Леб,
Г.А.Попов и др. Перспективные межпланетные полеты с иcпользованием
электроракетных двигателей и ядерных энергетических установок. Итоговый отчет
Объединенной Российско- Германской исследовательской группы. Москва-Бонн-Париж.
1995. 217 с.
6.
T.M.Eneev, R.Z.Akhmetshin,
G.B.Efimov, V.A.Yegorov. Asteroid and Comet Rendezvous Missions Using
Low-thrust Nuclear Electric Propulsion. Space Forum, 2000, Vol.5, 279–305.
7.
T.M.Eneev, M.Hechler,
L.A.Latyshev, H.W. Loeb, G.A. Popov, G. Schwemm. Advanced Solar System Exploration Missions
Using Nuclear-Electric Propulsion, IAF-94-353, Jerusalem, October 1994.
8.
V.S.Avduevsky, E.L.Akim,
T.M.Eneev, M.S.Konstantinov and all. Space
vehicle of new generation for solar system study. Paper IAF-98-Q.2.06,
Melbourne, Australia, Sept 28-October 2, 1998.
9.
T.M.Eneev, M.S.Konstantinov,
R.Z.Akhmetshin, G.B.Efimov, G.G.Fedotov, V.G.Petukhov. Mercury-to-Pluto Range
Missions Using Solar-Nuclear Electric Propulsion. Preprint, 1996, N 111.
10. R.Z. Akhmetshin, T.M. Eneev. Main belt asteroid missions with low thrust
and gravity assist of Mars. 17th International Simposium on Space Flight
Dynamics. Proceedings, Moscow, 2003. Vol 2, 307-313.