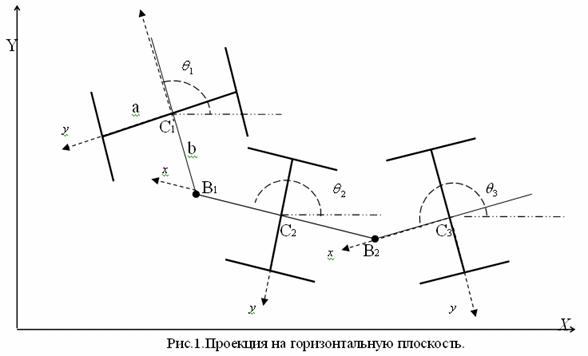
Исследование динамики движения цепочки "Робопоезд". Методы планирования движения
|






|
|
1 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
|
3.02 |
3.16 |
3.28 |
3.35 |
3.38 |
3.37 |
3.3 |
3.19 |
3.03 |
2.83 |
|
|
0.03 |
0.28 |
0.58 |
0.9 |
1.23 |
1.57 |
1.91 |
2.23 |
2.54 |
2.83 |
|
|
0.01 |
0.09 |
0.18 |
0.27 |
0.36 |
0.47 |
0.58 |
0.7 |
0.84 |
1 |
|
|
100 |
110 |
120 |
130 |
140 |
150 |
160 |
170 |
179 |
180 |
|
|
2.59 |
2.31 |
2.01 |
1.68 |
1.34 |
1 |
0.65 |
0.32 |
0.03 |
0 |
|
|
3.08 |
3.3 |
3.48 |
3.61 |
3.69 |
3.72 |
3.7 |
3.63 |
3.53 |
3.51 |
|
|
1.19 |
1.43 |
1.73 |
2.15 |
2.75 |
3.72 |
5.69 |
11.3 |
118 |
|
Таким
образом, из численного эксперимента можно сделать предположение, что при равных
интервалах движения по одной и второй спирали (Т1=Т2)
геометрическим местом финальных точек будет прямая.
Докажем
это аналитически.
Рассмотрим
уравнения движения по двум спиралям в предположении, что Т1=Т2=Т, ![]() , тогда, преобразуя уравнения (3.5), получим:
, тогда, преобразуя уравнения (3.5), получим:
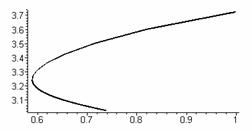
Из
полученных уравнений следует, что координаты результирующей точки линейно
зависят от параметра К1 и
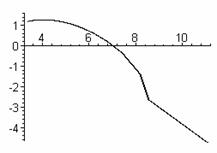
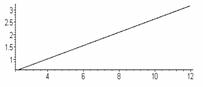
параметрически задают прямую. На рис.5 изображены графики зависимостей
координат х и у от параметра К1 при ![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() , Т=1.
, Т=1.

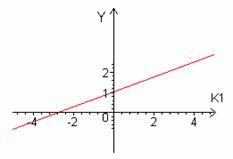
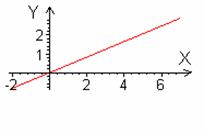
Рис.5 Зависимость
координат х и у от параметра К1 и результирующая прямая.
Геометрическое
место конечных точек показано на подграфике 3 рис.5. Оно представляет собой
прямую, уравнение которой имеет вид:
Проанализируем
полученные параметрические уравнения
Из
этих уравнений видно, что положение финальной точки на найденной прямой зависит
не только от коэффициента К1,
но и от таких параметров системы как начальные скорости вращения колес ведущей
тележки ![]() , интервала времени Т движения
по дугам первой и второй спиралей,
геометрических параметров тележки. Чем больше начальная скорость и временной
интервал, тем дальше будет находиться на этой прямой конечная точка от начальной.
, интервала времени Т движения
по дугам первой и второй спиралей,
геометрических параметров тележки. Чем больше начальная скорость и временной
интервал, тем дальше будет находиться на этой прямой конечная точка от начальной.
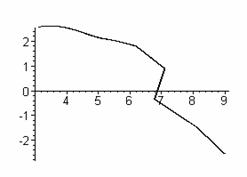
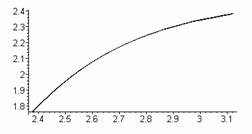
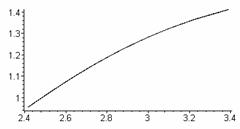
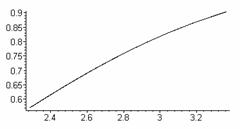
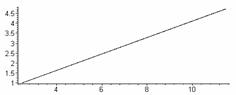
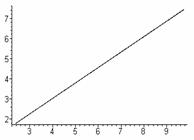
На
рис.6 показана закономерность изменения координат финальной точки от параметра
Т при фиксированном К1. Из
первого графика видно, что эта зависимость квадратичная, второй график
подтверждает, что конечные точки лежат на одной прямой.
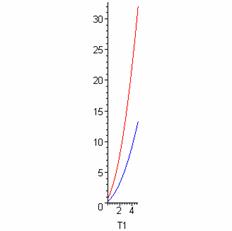
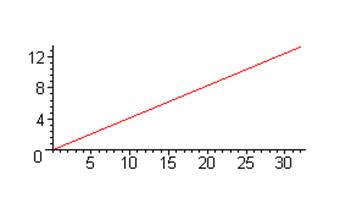
Рис.6. Закономерность
изменения координат финальной точки от параметра Т.
Таким
образом, известен аналитический вид уравнения характеристической прямой, которой
будут принадлежать финальные точки и, используя это параметрическое описание,
можно задавать параметр К1
таким образом, чтобы за интервал времени 2Т из начальной точки система
переходила в заданную конечную точку на этой характеристической прямой. Именно
это свойство будем использовать для планирования движения.
5. Принцип «коридоров» планирования траектории.
Трассу
движения можно задавать различными способами. Рассмотрим два принципа задания
трассы. В этом параграфе будем исследовать возможность планирования траектории
по принципу «коридоров». Трасса в этом случае задается следующим образом:
заданы отрезки некоторых прямых и окрестность около них. Необходимо
спланировать движение системы в окрестности заданных отрезков. Вид подобной траектории
показан на следующем рисунке 7:
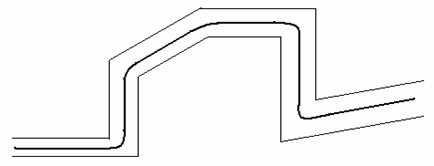
Рис.7.
Задание трассы методом «коридоров»
Зададим
траекторию движения следующим образом. Пусть траектория состоит из четырех
отрезков, каждый из которых задается уравнениями прямой:
![]()
![]()
![]()
![]()
При
этом начало и конец отрезков определяются точками пересечения прямых, строго в
указанном порядке. Начало и конец трассы заданы точками ![]() и
и ![]() , расположенными на первой и последней прямой.
, расположенными на первой и последней прямой.
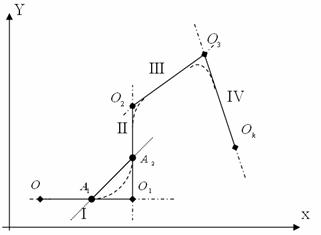
Рис.8. Этапы планирования движения.
 Предположим, что в начальной
точке трассы угловые скорости вращения колес равны, угол ориентации ведущей
тележки совпадает с углом наклона прямой, задающей первый отрезок. Условия
движения по прямой при таких начальных условиях известны. Переход с одной
прямой на другую будем осуществлять при помощи движения по двум спиралям,
используя результаты предыдущего параграфа. Движение по коридору, заданному
двумя отрезками, разбивается на три участка:
Предположим, что в начальной
точке трассы угловые скорости вращения колес равны, угол ориентации ведущей
тележки совпадает с углом наклона прямой, задающей первый отрезок. Условия
движения по прямой при таких начальных условиях известны. Переход с одной
прямой на другую будем осуществлять при помощи движения по двум спиралям,
используя результаты предыдущего параграфа. Движение по коридору, заданному
двумя отрезками, разбивается на три участка:
-
движение по прямой, задающей первый отрезок, от начальной точки до точки ![]() (выбирается
самостоятельно на первой прямой):
(выбирается
самостоятельно на первой прямой):
-движение
по двум дугам спиралей от точки ![]() до точки
до точки ![]() (принадлежит прямой,
задающей второй отрезок движения, точные координаты определяются ниже):
(принадлежит прямой,
задающей второй отрезок движения, точные координаты определяются ниже):
-движение
по прямой, задающей второй отрезок, до нужной точки.
При
движении по прямой, задающей первый отрезок, от начальной точки до точки ![]() угол ориентации не
меняется и совпадает с углом наклона прямой, задающей первый отрезок. Угловая
скорость вращения колес может равномерно меняться до необходимой (при этом, в
точке
угол ориентации не
меняется и совпадает с углом наклона прямой, задающей первый отрезок. Угловая
скорость вращения колес может равномерно меняться до необходимой (при этом, в
точке![]() угловые скорости обоих колес
ведущей тележки будут одинаковыми). Определим параметры для осуществления
такого движения. Пусть угловые скорости вращения колес ведущей тележки меняются
по следующему закону:
угловые скорости обоих колес
ведущей тележки будут одинаковыми). Определим параметры для осуществления
такого движения. Пусть угловые скорости вращения колес ведущей тележки меняются
по следующему закону:
![]()
Тогда,
координаты центра ведущей тележки будут меняться по следующему закону:

Из
этих уравнений можно определить интервал времени, за который центр ведущей
тележки переместится из начальной точки с координатами ![]() в точку
в точку ![]() .
.
Для
того чтобы система могла перейти на второй отрезок из точки ![]() , которая принадлежит первому отрезку, двигаясь по двум
спиралям с заданной ориентацией, необходимо подобрать параметры движения по
этим спиралям. Для этого рассмотрим следующую последовательность действий.
, которая принадлежит первому отрезку, двигаясь по двум
спиралям с заданной ориентацией, необходимо подобрать параметры движения по
этим спиралям. Для этого рассмотрим следующую последовательность действий.
Первый шаг.
Найдем углы ориентации ведущей тележки в начальный и конечный момент для движения
по заданным отрезкам. В точке ![]() угол ориентации
совпадает с углом наклона прямой, задающей первый отрезок. В конечной точке
угол ориентации должен совпадать с углом наклона прямой, задающей второй
отрезок.
угол ориентации
совпадает с углом наклона прямой, задающей первый отрезок. В конечной точке
угол ориентации должен совпадать с углом наклона прямой, задающей второй
отрезок.
Таким
образом, имеем
 ,
, ![]() ,
,
откуда находим начальный и конечный углы
ориентации.
Второй шаг.
Найдем точку пересечения прямых, задающих первый и второй отрезки движения. Эта
точка будет иметь следующие координаты:
Третий шаг.
Находим координаты точки ![]() . Принадлежность этой точки первой прямой выражается
условием:
. Принадлежность этой точки первой прямой выражается
условием: ![]() .
.
Допустим,
система должна начать поворот на расстоянии
![]() от точки пересечения
первой и второй прямой, т.е.
от точки пересечения
первой и второй прямой, т.е. ![]() , это условие выражается следующей формулой:
, это условие выражается следующей формулой:
 .
.
Используя
первое и второе условие, получим следующие координаты точки![]() :
:
Так
получаем начальные координаты для движения по двум спиралям.
Четвертый шаг.
Из предыдущего параграфа следует, что геометрическим местом финальных точек,
конечный угол ориентации в которых совпадает с заданным, является прямая вида:
где ![]() ,
, ![]() .
.
Запишем уравнение этой прямой в следующем виде: ![]() .
.
Найдем
точку пересечения этой прямой и прямой, задающей второй отрезок. Это будет точка
![]() с координатами
с координатами ![]() .
.
где
![]()
Пятый шаг.
Так как точка ![]()
![]() принадлежит прямой
принадлежит прямой ![]() , то ее координаты удовлетворяют параметрическим уравнениям
этой прямой, а, следовательно, верно следующее уравнение
, то ее координаты удовлетворяют параметрическим уравнениям
этой прямой, а, следовательно, верно следующее уравнение
Откуда находим параметр К1
Теперь,
зная параметр К1, и,
используя выводы предыдущего параграфа, можно определить значения основных характеристик для движения по двум
спиралям, для того чтобы из одной точки система могла перейти в другую с заданной
ориентацией.
Движение
по второму отрезку из точки ![]() до нужной точки
осуществляется так же, как и по первому
отрезку прямой, но для него ищется свой интервал времени.
до нужной точки
осуществляется так же, как и по первому
отрезку прямой, но для него ищется свой интервал времени.
Далее
проведем ту же процедуру для второго и третьего отрезков движения и так далее
до конечной точки.
Следует
заметить, что ширина «коридора» зависит от точности прохождения трассы системой
тележек. Этот вопрос рассматривался в [2].
6. Принцип реперных точек планирования
траектории.
В
этом параграфе рассмотрим другой принцип задания трассы. Предположим, на
исходном этапе планирования трасса задана следующим образом. Пусть на плоскости
задано нумерованное множество точек своими координатами. Так же в каждой точке
заданы скорости вращения колес ведущей тележки (в данном случае будем считать,
что они в каждой точке равны), и углы ориентации. Нужно пройти все точки заданного
множества в нужном порядке и с заданными в каждой точке условиями на угол
ориентации и скорость.
Y
X
Рис.
9. Задание трассы методом реперных точек.
В реализации такого движения возникают следующие
трудности. В предыдущих параграфах
данной главы было показано, что существуют ограничения в возможностях
перемещения из одной точки декартового, конфигурационного и фазового пространства
в другую заданную точку. А именно, если мы хотим попасть из одной точки с
заданными начальными условиями в другую точку, угол ориентации в которой будет
точно задан, то при движении по двум спиралям эта точка должна будет лежать на
заданной определенным образом прямой и никак иначе. Таким образом, далеко не
всегда можно попасть из одной точки в другую с заданными таким образом
условиями. Для преодоления указанного ограничения нужно планировать движение
при помощи отрезков прямых и дуг спиралей. Для этого построим траекторию
движения следующим образом.
Рассмотрим две соседние точки ![]() и
и ![]() . Каждая из них задает прямую, проходящую через эту точку, и
угол наклона которой совпадает с углом ориентации в этой точке
. Каждая из них задает прямую, проходящую через эту точку, и
угол наклона которой совпадает с углом ориентации в этой точке ![]() и
и ![]() . Тогда уравнения этих прямых будут иметь следующий вид:
. Тогда уравнения этих прямых будут иметь следующий вид:
![]()
![]()
Тогда на первой
прямой рассмотрим точку ![]() , находящуюся на расстоянии
, находящуюся на расстоянии ![]() от заданной точки в
направлении движения, а на второй прямой рассмотрим точку
от заданной точки в
направлении движения, а на второй прямой рассмотрим точку ![]() , находящуюся на расстоянии
, находящуюся на расстоянии ![]() от второй заданной
точки, но в направлении, обратном направлению движения. Координаты этих точек
выражаются следующим образом:
от второй заданной
точки, но в направлении, обратном направлению движения. Координаты этих точек
выражаются следующим образом:
и
Теперь построим прямую, соединяющую эти две точки. Её
уравнение будет иметь следующий вид:
Y
![]()
![]()
![]()
![]() X
X
Рис.10.
Построение дополнительной прямой при переходе из одной точки в другую.
Таким образом, мы построили траекторию, состоящую из
отрезков прямых (Уравнение каждой прямой задано). Планировать движение по такой
траектории мы можем при помощи принципа «коридоров». Следовательно, задача
планирования траектории по реперным точкам сводится к задаче планирования движения по принципу
«коридоров».
7. Реализация алгоритмов движения в
пакете Matlab.
Сначала рассмотрим реализацию принципа «коридоров».
Пусть траектория движения задана отрезками следующих прямых:
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
Тогда точками пересечения
этих прямых будут:
![]() ,
, ![]() ,
, ![]() ,
, ![]()
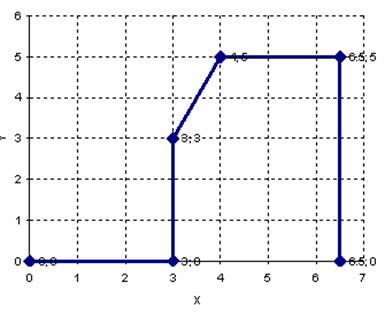
Рис.11.Траектория
планируемого движения.
Начальная точка ![]() имеет координаты
(0,0), конечная
имеет координаты
(0,0), конечная ![]() имеет координаты (6.5,
0). Положим, что ориентация системы в начальный момент совпадает с направлением
прямой, задающей первый отрезок движения. Скорости вращения колес ведущей
тележки в начальной и конечной точке равны нулю. Определим параметры для
осуществления движения по такой траектории.
имеет координаты (6.5,
0). Положим, что ориентация системы в начальный момент совпадает с направлением
прямой, задающей первый отрезок движения. Скорости вращения колес ведущей
тележки в начальной и конечной точке равны нулю. Определим параметры для
осуществления движения по такой траектории.
Вначале зададим координаты точек, в которых нужно
начинать переход с одного отрезка заданной траектории на другой. Положим, что
расстояния от точки пересечения прямых, задающих рассматриваемые отрезки до
точки начала перехода с одной прямой на другую, для каждого отрезка равны
единице. Тогда координаты начальных точек
переходного процесса для каждого отрезка будут следующими: ![]() ,
,![]() ,
,![]() ,
,![]() .
.
Далее найдем уравнения вспомогательных прямых,
проходящих через полученные точки и имеющих вид ().
Для точки ![]() это будет прямая
это будет прямая ![]() . Она пересекает второй отрезок в точке
. Она пересекает второй отрезок в точке ![]() . Для точки
. Для точки ![]() это будет прямая
это будет прямая ![]() . Она пересекает третий отрезок в точке
. Она пересекает третий отрезок в точке ![]() . Для точки
. Для точки ![]() это будет прямая
это будет прямая ![]() . Она пересекает четвертый отрезок в точке
. Она пересекает четвертый отрезок в точке ![]() . Для точки
. Для точки ![]() это будет прямая
это будет прямая ![]() . Она пересекает пятый отрезок в точке
. Она пересекает пятый отрезок в точке ![]() .
.
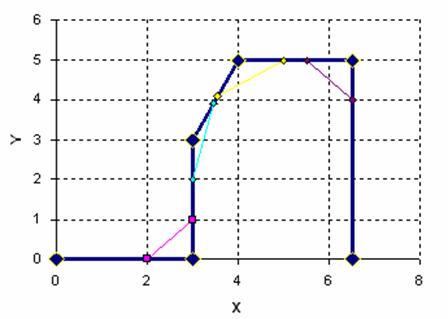
Рис.12. Траектория планируемого движения и отрезки
вспомогательных прямых.
Тогда движения по заданной траектории можно разбить на
следующие этапы:
- разгон по прямой ![]() из начальной точки
из начальной точки ![]() до точки
до точки ![]() , (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 0 до 1). Параметры движения следующие: Т=1,
К1=К2=1.
, (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 0 до 1). Параметры движения следующие: Т=1,
К1=К2=1.
- равномерное движение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() . Параметры движения следующие: Т=1, К1=К2=0.
. Параметры движения следующие: Т=1, К1=К2=0.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки ![]() первого отрезка в
точку
первого отрезка в
точку ![]() второго отрезка. Параметры движения определяются, используя
результаты предыдущего параграфа. Т=1, К1=-1,87, К2=1.27,
k1=1,87, k2=-1,27.
второго отрезка. Параметры движения определяются, используя
результаты предыдущего параграфа. Т=1, К1=-1,87, К2=1.27,
k1=1,87, k2=-1,27.
-
равномерное движение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() . Параметры движения следующие: Т=1, К1=К2=0.
. Параметры движения следующие: Т=1, К1=К2=0.
- переход со второго отрезка траектории (заданного
прямой ![]() ) на третий отрезок (заданный прямой
) на третий отрезок (заданный прямой ![]() ). Движение по дугам двух спиралей из точки
). Движение по дугам двух спиралей из точки ![]() второго отрезка в
точку
второго отрезка в
точку ![]() третьего отрезка. Параметры движения определяются, с
использованием результатов предыдущего параграфа. Т=1, К1=0,45, К2=-0,47,
k1=-0,45, k2=0,45.
третьего отрезка. Параметры движения определяются, с
использованием результатов предыдущего параграфа. Т=1, К1=0,45, К2=-0,47,
k1=-0,45, k2=0,45.
- равномерное
движение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() . Параметры движения следующие: Т=0,23, К1=К2=0.
. Параметры движения следующие: Т=0,23, К1=К2=0.
- переход с третьего отрезка траектории (заданного
прямой ![]() ) на четвертый отрезок (заданный прямой
) на четвертый отрезок (заданный прямой ![]() ). Движение по дугам двух спиралей из точки
). Движение по дугам двух спиралей из точки ![]() третьего отрезка в
точку
третьего отрезка в
точку ![]() четвертого отрезка.
Параметры движения определяются, используя результаты предыдущего параграфа.
Т=1, К1=0,97, К2=-1,24, k1=-0,97, k2=1,24.
четвертого отрезка.
Параметры движения определяются, используя результаты предыдущего параграфа.
Т=1, К1=0,97, К2=-1,24, k1=-0,97, k2=1,24.
- равномерное движение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() . Параметры движения следующие: Т=0,5, К1=К2=0.
. Параметры движения следующие: Т=0,5, К1=К2=0.
- переход с четвертого отрезка траектории (заданного
прямой ![]() ) на пятый отрезок (заданный прямой
) на пятый отрезок (заданный прямой ![]() ). Движение по дугам двух спиралей из точки
). Движение по дугам двух спиралей из точки ![]() четвертого отрезка в
точку
четвертого отрезка в
точку ![]() пятого отрезка.
Параметры движения определяются с использованием результатов предыдущего
параграфа. Т=1, К1=1,27, К2=-1,87, k1=-1,27, k2=1,87.
пятого отрезка.
Параметры движения определяются с использованием результатов предыдущего
параграфа. Т=1, К1=1,27, К2=-1,87, k1=-1,27, k2=1,87.
- торможение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() , (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 1 до 0). Параметры движения следующие: Т=8,
К1=К2=-0,125.
, (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 1 до 0). Параметры движения следующие: Т=8,
К1=К2=-0,125.
На рисунке 13 приведены графики изменения основных характеристик движения при
выполнении описанной выше траектории. При этом геометрические параметры системы
таковы: a=b=r=1. Из последнего графика видно, как отличается
траектория движения второй тележки от траектории движения первой. Максимальное
отклонение равно 0,5.
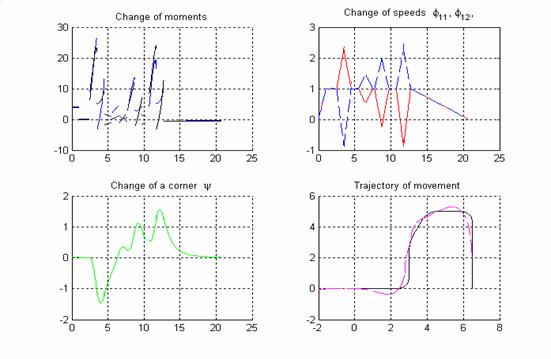
Рис.13 Траектория движения и его основные параметры
при реализации принципа
«коридоров» планирования движения
Теперь рассмотрим реализацию принципа реперных точек. Пусть траектория
движения задана реперными точками: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и углами ориентации
ведущей тележки в данных точках:
и углами ориентации
ведущей тележки в данных точках: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Тогда, следуя выводам предыдущего параграфа, для
осуществления заданного движения необходимо построить вспомогательную
траекторию.
. Тогда, следуя выводам предыдущего параграфа, для
осуществления заданного движения необходимо построить вспомогательную
траекторию.
Рис.14.
Траектория планируемого движения методом реперных точек.
Вспомогательная траектория строится согласно предыдущему параграфу
следующим образом. Сначала необходимо построить вспомогательные точки, которые
для каждой заданной реперной точки лежат на прямой, заданной углом ориентации в
этой точке на заданном расстоянии от неё. Положим, что для всех реперных точек
это расстояние задано и равно 0.5. Тогда в рассматриваемом примере координаты
вспомогательных точек будут следующими:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Теперь, соединим эти точки и
реперные точки отрезками прямых, уравнения которых в данном случае будут иметь
вид:
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
6. ![]()
7. ![]()
8. ![]()
9. ![]()
Теперь можно использовать метод «коридоров» для
построения алгоритма управления. Тогда движения по заданной траектории можно разбить
на следующие этапы:
- разгон по прямой ![]() из начальной точки
из начальной точки ![]() до точки (0.1,0), (при
этом, значения угловых скоростей вращения колес ведущей тележки линейно
меняются от 0 до 1). Параметры движения следующие: Т=0.2, К1=К2=5.
до точки (0.1,0), (при
этом, значения угловых скоростей вращения колес ведущей тележки линейно
меняются от 0 до 1). Параметры движения следующие: Т=0.2, К1=К2=5.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (0.1, 0) в точку (0.89, -0,08).
Параметры движения таковы: Т=1, К1=-0.9, К2=-1.1, k1=0.9, k2=1.1.
- равномерное движение по прямой ![]() из точки (0.89, -0,08)
до точки (2.51,-0.42). Параметры движения следующие: Т=1.75, К1=К2=0.
из точки (0.89, -0,08)
до точки (2.51,-0.42). Параметры движения следующие: Т=1.75, К1=К2=0.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (2.51,-0.42) в точку (3,0). Параметры
движения таковы: Т=1, К1=-2.87, К2=-1.1, k1=2.87, k2=1.1.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (3,0) в точку (2.95, 0,99). Параметры
движения таковы: Т=1, К1=-1.07, К2=-0.96, k1=1.07, k2=0.96.
- равномерное движение по прямой ![]() из точки (2.95,0,99)
до точки (2.83, 2.06). Параметры движения следующие: Т=1.05, К1=К2=0.
из точки (2.95,0,99)
до точки (2.83, 2.06). Параметры движения следующие: Т=1.05, К1=К2=0.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (2.83, 2.06) в точку (3, 3). Параметры
движения таковы: Т=1, К1=-0.43, К2=-1, k1=0.43, k2=1.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (3,3) в точку (3.31, 3.95). Параметры
движения таковы: Т=1, К1=-1.28, К2=-0.99, k1=1.28, k2=0.99.
- равномерное
движение по прямой ![]() из точки
(3.31,3.95) до точки (3.41, 4.5).
Параметры движения следующие: Т=0,54, К1=К2=0.
из точки
(3.31,3.95) до точки (3.41, 4.5).
Параметры движения следующие: Т=0,54, К1=К2=0.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (3.41, 4.5)в точку (4, 5). Параметры
движения таковы: Т=1, К1=0.33, К2=-1.06, k1=-0.33, k2=1.06.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (4,5) в точку (4,99, 5,12). Параметры
движения таковы: Т=1, К1=-1.25, К2=-1, k1=1.25, k2=1.
- равномерное движение по прямой ![]() из точки (4,99,
5,12) до точки (6.02, 5.38). Параметры
движения следующие: Т=1.06, К1=К2=0.
из точки (4,99,
5,12) до точки (6.02, 5.38). Параметры
движения следующие: Т=1.06, К1=К2=0.
- переход с одного отрезка траектории на другой.
Движение по дугам двух спиралей из точки (6.02, 5.38) в точку (6.5, 5).
Параметры движения таковы: Т=1, К1=0.7, К2=-1.11, k1=-0.7, k2=1.11.
- равномерное движение по прямой ![]() из точки (6.5, 5) до точки (6.5, 4). Параметры движения
следующие: Т=1, К1=К2=0.
из точки (6.5, 5) до точки (6.5, 4). Параметры движения
следующие: Т=1, К1=К2=0.
- торможение по прямой ![]() из точки
из точки ![]() до точки
до точки ![]() , (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 1 до 0). Параметры движения следующие: Т=8,
К1=К2=-0,125.
, (при этом, значения угловых скоростей вращения колес
ведущей тележки линейно меняются от 1 до 0). Параметры движения следующие: Т=8,
К1=К2=-0,125.
На
рис.15 изображены графики изменения основных характеристик движения при
исполнении данной траектории и сама траектория движения ведущей тележки и
хвостовой части цепи.
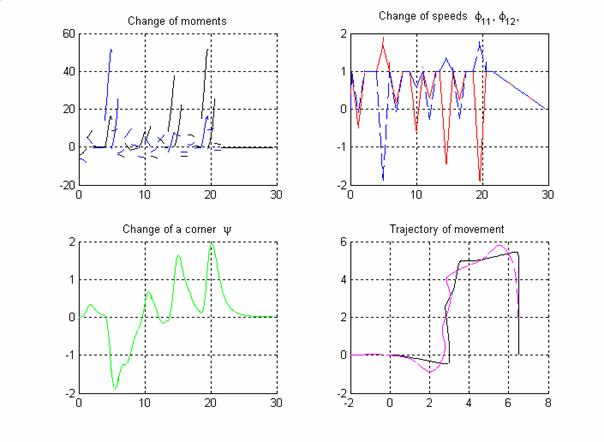
Рис.15.
Траектория движения и его основные параметры при реализации принципа реперных точек планирования движения.
В
данном случае отклонение реальной траектории от спланированной не превышает 0.7. Достигнутую точность можно считать достаточной, при
необходимости точность можно улучшить
соответствующей коррекцией промежуточных точек.
ЗАКЛЮЧЕНИЕ
Предложены методы управления цепочкой «робопоезд» при переходе между
точками различных пространств – декартова, конфигурационного и фазового.
Фактически, это задачи следующих классов: переход системы в заданную конечную
точку, переход системы в заданную конечную точку с заданной ориентацией в ней,
переход системы в заданную конечную точку с заданными в ней ориентацией и
скоростями. Показана разрешимость перечисленных задач.
На основе предложенных методов разработаны два принципа планирования
движения описанной системы принцип «коридоров» и принцип реперных (опорных)
точек. Дана оценка размеров коридора, необходимого для прохождения всей системой заданной трассы. Численные
расчеты показали эффективность предложенных методов построения движения цепочки
«робопоезд» и достаточные точности исполнения движения.
Данная работа завершает цикл, начатый в [1-2] и позволяет перейти к
фазе экспериментальных исследований.
Список литературы
1. В.Е.Павловский, Н.В.Петровская. Исследование динамики
движения цепочки «робопоезд». Уравнения движения, частные решения. Препринт ИПМ
им.М.В.Келдыша РАН, 2005.
2. В.Е.Павловский, Н.В.Петровская, В.В.Евграфов.
Исследование динамики движения цепочки «робопоезд».. Управляемое движение.
Препринт ИПМ им.М.В.Келдыша РАН, 2005.
3.
Неймарк Ю.И.,
Фуфаев Н.А. Динамика неголономных систем. − М.: Наука, 1967.−520 с.
4. Голубев Ю.Ф.
Основы теоретической механики: Учебник.
М.: Изд-во Моск. Ун-та., 2000.-719c.
5.
Маркеев А.П. Теоретическая механика: Учебное пособие. М.: Наука, 1990.-416c.