 |
Траектории возвращения с геостационарной орбиты к Земле при использовании гравитационного поля Луны
|
1. ВВЕДЕНИЕ
Геостационарные
спутники, практически неподвижно «висящие» над соответствующими точками Земли,
важны для обеспечения линий космической связи и наблюдения за Землей. В рамках
центрального ньютоновского гравитационного поля такой спутник, как известно,
должен двигаться по т.н. геостационарной орбите – круговой геоэкваториальной
орбите радиуса R»42164 км, с
звездно-суточным периодом обращения. С точки зрения прикладной небесной
механики для обеспечения функционирования таких спутников надо решить ряд
задач, в частности, задачу выведения космического аппарата с Земли на ГСО и
задачу удаления КА с ГСО [1]. Относительно выведения КА на ГСО с использованием
двигателя большой тяги анализ показал [2-4], что при достаточно большой широте
точки старта, свыше ~ 28° (это
выполняется для Российских космодромов Байконур и Плисецк), энергетически
выгоднее использовать не «прямую» схему полета, а «обходную», с предварительным
подлетом к Луне. При этом выполняется лунный гравитационный маневр с пассивным
изменением наклонения и перигейного расстояния и затем осуществляется подлет к
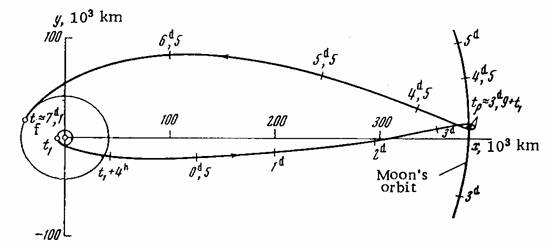
ГСО, см. рис. 1 [2-4]. В силу важности этого
результата данное исследование позднее было повторено европейскими учеными [5].
Рис. 1. Траектория выведения КА на
геостационарную орбиту с гравитационным маневром у Луны.
На рис. 2 приведена зависимость характеристической
скорости выведения на ГСО от начального наклонения - для двух схем полета [2-4]. Здесь кривая wкI
соответствует двух- и трехимпульсному полету в поле притяжения Земли, а кривая wкII – полету с
маневром у Луны. Последняя схема выведения, основанная на идеях А. Штернфельда
об «обходных» перелетах [6-7] и идеях Ф.А. Цандера о гравитационных маневрах
[8], была реализована на практике космонавтики для выведения спутника ASIASAT 3/HGS-1 [9, 10], и это было названо «наиболее впечатляющим»
событием космонавтики в
Рис. 2. Энергетика выведения на ГСО
для двух схем полета.
Рис. 3. Траектория выведения КА ASIA SAT 3/HGS-1 на ГСО.
Вторая
задача – задача увода КА с ГСО, являющаяся предметом нашего анализа, возникает,
в первую очередь, ввиду того, что места на ГСО очень дефицитны. Так, уже сейчас
на ГСО работает ~ 350 КА. Поэтому, чтобы не создавать «космического мусора» на
ГСО, КА после окончания своего функционирования должен быть уведен с этой
орбиты. Сейчас этот увод осуществляется поднятием высоты его орбиты на
несколько сотен километров. Однако это представляется временной мерой, и в
будущем скоро должен встать вопрос о кардинальном решении данной задачи.
Таким решением является,
например, возвращение КА с ГСО к Земле. При этом будет происходить сгорание и
разрушение КА в атмосфере или посадка его на поверхность Земли. Последний
вариант может быть необходим, в частности (и это вторая причина постановки
данной задачи), для возвращения на Землю ценного оборудования, результатов
научных исследований или многоразового аппарата обслуживания объектов на ГСО
[11]. В настоящей работе изложены основные результаты численного и
аналитического исследования данной задачи при использовании двигателя большой
тяги. Показано, что «обходные» траектории, использующие предварительный подлет
к Луне для выполнения специального лунного гравитационного маневра торможения и
последующий полет к Земле, энергетически всегда выгоднее обычных
«прямых» траекторий возврата к Земле. Выявлены условия реализуемости
«обходной» схемы возвращения с ГСО. Построено семейство таких траекторий,
выполнен анализ их характеристик [1, 12].
2. «ПРЯМОЙ»
СПУСК КА С ГСО К ЗЕМЛЕ
В случае «прямого» возвращения
космическому аппарату на ГСО сообщается тормозной импульс скорости DV(I), см. рис. 4,
уменьшающий скорость КА с начальной скорости V1 (» 3,075 км/с) до некоторой скорости Va2 (<V1) и
переводящий КА на эллиптическую экваториальную орбиту подлета к Земле.
Рис. 4. Схема «прямого» спуска КА с ГСО на Землю.
Апогейное расстояние орбиты Т2 равно R, геоцентрическое расстояние в условном перигее rpf должно обеспечить спуск КА, это варьируемый
параметр задачи:
0£ rpf £ rpf max »
На рис. 5 кривая DV(I) дает
изменение величины этого импульса скорости как функцию от конечного расстояния rpf, DV(I) » (1,49-3,075) км/с.
Рис. 5. Зависимость
характеристик возвращения КА с ГСО на Землю от конечного расстояния в условном
перигее.
3.
«ОБХОДНЫЕ» ПЕРЕЛЕТЫ ГСО-ЗЕМЛЯ С ОБЛЕТОМ ЛУНЫ. ЧИСЛЕННЫЙ
АНАЛИЗ
Если учесть результаты
анализа задачи выведения КА на ГСО, то естественно предположить, что и для
задачи спуска энергетически оптимальной может быть «обходная» схема полета с гравитационным
маневром у Луны. На основе качественного анализа проблемы, который рассмотрим
далее, и с учетом опыта построения и исследования траекторий Земля-ГСО [2-4], а
также обходных перелетов между Землей и Луной [13-14] разработан численный
алгоритм, с помощью которого построено семейство «обходных» траекторий
полета к Земле с ГСО. При этом траектории КА определяются интегрированием
уравнений движения точки в невращающейся геоэкваториальной геоцентрической
прямоугольной системе координат OXYZ. Используется
метод интегрирования [15], разработанный в ИПМ им. Келдыша для расчета
траекторий КА. Учтено поле притяжения Земли (вместе с ее главной гармоникой с20), Луны и
Солнца. Координаты Луны и Солнца вычисляются по JPL–эфемеридам DE403.
Определяется также движение точки в селеноцентрической системе координат MXYZ.
На Рис. 6, 7 приведены
характеристики одной типичной «обходной» траектории возвращения с ГСО к Земле
[16-18].
Рис.
6. Геоцентрическая траектория "обходного" типа для спуска КА с ГСО на
Землю при использовании Лунного гравитационного маневра, в проекции XY.
Здесь E – Земля, M – Луна. На
рис. 6 сплошная кривая дает геоцентрическое движение КА, штрих-пунктир - орбиту
Луны, пунктир – орбиту ГСО. В начальный момент t1 (29 декабря
На рис. 7 представлено движение
КА относительно Луны на участке ее облета. Здесь дана также схема изменения
скорости КА в результате облета Луны. Под влиянием ее гравитации происходит
поворот вектора селеноцентрической скорости «на бесконечности» на некоторый
угол d (от V¥- к V¥+). Новая
селеноцентрическая скорость V¥+ направлена
практически противоположно скорости Луны VM, т.е. происходит торможение геоцентрической скорости
КА (от V2 к V3),
уменьшение перигейного расстояния его орбиты с R »
4. КАЧЕСТВЕННЫЙ
АНАЛИЗ «ОБХОДНЫХ» ПЕРЕЛЕТОВ ГСО-ЗЕМЛЯ
Для более глубокого исследования
характеристик «обходной» схемы полета с ГСО к Земле дадим качественный
анализ этой схемы. При этом применим модель точечной
сферы действия Луны, эффективность которой для данного класса задач
показана при анализе перелета с Земли на ГСО [2-4]. В соответствии с этим
методом сфера действия Луны стягивается в точку, так что
геоцентрическая траектория КА для полета с начальной орбиты T1 (ГСО) к Земле представляется двумя дугами кеплеровских
орбит T2 и T3, соединенных в центре Луны при ее облете в момент t2. Здесь
геоцентрическая скорость КА меняется скачком с V2 до V3 в соответствии с поворотом на
некоторый угол d вектора селеноцентрической скорости КА
«на бесконечности» от V¥- к V¥+ (см. рис.
8).
В рамках данной модели примем
следующую расчетную схему «обходной» траектории. В некоторой точке
начальной орбиты T1 (ГСО)
космическому аппарату сообщается вдоль его скорости ускоряющий импульс скорости
DV(II), увеличивающий скорость КА от начальной V1 до скорости
Vp2 (Vp2 >V1) и
переводящий КА на вытянутую эллиптическую экваториальную орбиту Т2
для полета к Луне. Перигейное расстояние орбиты Т2 равно R, ее апогейное расстояние ra2 есть второй
варьируемый параметр задачи. Чтобы, двигаясь по орбите Т2, КА
встретился с Луной, Луна при встрече должна находится в плоскости Земного
экватора, т.е. в узле ее орбиты относительно экватора Земли.

Рис. 8.
Схема полета в модели точечной сферы действия Луны.
Пусть
выбран некоторый момент tM прохождения Луной узла ее орбиты
при облете КА, ему соответствуют параметры движения центра Луны: радиус-вектор rM и вектор скорости VM. Это задает время t2 и
радиус-вектор r2 КА при
сближении с Луной:
t2 = tM;
r2 = rM; z2 = zM
(tM)=0; (2)
здесь z – координата по оси OZ, перпендикулярной плоскости экватора Земли. Тем самым
определяется момент отлета с ГСО t1 и положение
орбиты Т2 в пространстве, в частности, геоцентрическая скорость КА
при подлете к Луне V2 . Это
позволяет найти вектор селеноцентрической скорости КА «на бесконечности» при
подлете к Луне:
V¥- = V2 - VМ; | V¥-| = V¥. (3)
После его
поворота на некоторый угол d,
определяемый расстоянием до Луны в периселении орбиты, получаем селеноцентрическую скорость КА
«на бесконечности» при отлете от Луны и, тем самым, геоцентрическую скорость КА
полета к Земле V3 (рис. 8):
V3 = VМ + V¥+; |V¥+|
= V¥; (4)
cos d=(V¥-,V¥+)/V¥2; (5)
rp= a (1/sin(d/2)-1); a = mM/V¥2; (6)
где mM (»4902,8 км3/с2) – гравитационная
константа Луны, rp -
расстояние до Луны в периселении, a –
действительная полуось гиперболы, селеноцентрической орбиты КА.
Условие
(4) показывает, что в пространстве скоростей V конец вектора скорости V3 лежит на сфере S с центром в конце вектора скорости Луны VM и радиусом V¥ , см. рис.
9:
S: ![]() (7)
(7)
где Vr, Vm, Vb –
компоненты скорости по радиусу, трансверсали и бинормали орбиты Т2 в
момент tM (т.е. оси Vr, Vm лежит в плоскости экватора Земли,
ось Vb направлена
по оси вращения Земли OZ); VMr, VMm, VMb – аналогичные компоненты вектора
скорости Луны.
Вектор
(tM, rM, V3) задает
геоцентрическую орбиту T3 движения КА к Земле после облета Луны. Ее
перигейное расстояние rp3 должно быть
равно заданному значению rpf (1):
![]() (8)
(8)
Это условие
геометрически задает в пространстве V гиперболоид вращения H, которому
должен принадлежать конец вектора скорости V3, см. рис. 9:
H:  (9)
(9)
здесь mE (»398600,45 км3/с2) – гравитационная
константа Земли, r=rM, rp= rpf.
а)
Вид с оси Vt на
множество решений A=H∩S.
Пересечение сферы S (4) и гиперболоида
H (9) задает в
пространстве V множество A решений
задачи, см. рис. 9. Здесь начало пространства скоростей V помещено в центр Луны M, ось Vt
направлена по трансверсальной скорости Луны VMt, поэтому
плоскость (Vr, Vt) есть плоскость орбиты Луны, в ней
лежит скорость Луны VM и, следовательно, центр OS
сферы S и ось
симметрии гиперболоида H. Она является поэтому плоскостью симметрии множества
решений A=H∩S. На рис. 9
справа приведен вид на это множество A с оси Vt для
приведенного варианта пересечения поверхностей H и S. Здесь Vn – компонента
скорости по нормали к плоскости орбиты Луны.
В
общем случае, если d – наименьшее
расстояние от центра сферы до гиперболоида, то решение задачи существует, когда
V¥ ³ V¥ min=d.
(10)
При этом
для реализуемости маневра должно быть также выполнено условие на расстояние
до Луны в периселении орбиты (6):
rp ³ rp min º RM+DR,
(11)
где RM (=1838 км) – средний радиус Луны, DR (~
Замечание. Аналитическая
запись условия (10) несложна, но в общем случае довольно громоздка. Однако в
данной задаче, когда гиперболоид очень близок к круговому цилиндру ![]() =
= ![]() , и, кроме того, V¥/tp<<1, ½VMr½/tp<<1
(ибо sp/tp<<1, sp »0,2 км/с, tp »11 км/с, V¥ »1 км/с, ½VMr½»0,05 км/с, здесь VMr - радиальная скорость Луны), это условие довольно
хорошо (с относительной точностью ~ 2×10-6) записывается в виде:
, и, кроме того, V¥/tp<<1, ½VMr½/tp<<1
(ибо sp/tp<<1, sp »0,2 км/с, tp »11 км/с, V¥ »1 км/с, ½VMr½»0,05 км/с, здесь VMr - радиальная скорость Луны), это условие довольно
хорошо (с относительной точностью ~ 2×10-6) записывается в виде:
![]() (12)
(12)
где
![]() (13)
(13)
трансверсальная
компонента скорости Луны.
Так как функция ![]() монотонна,
то из условия (10, 12) следует ограничение:
монотонна,
то из условия (10, 12) следует ограничение:
![]() (14)
(14)
где V¥ (ra2 min)=V¥ min.
При V¥ = V¥ min,
ra2 = ra2 min имеем касание поверхностей S, H и единственное решение задачи. На рис. 5
сплошная кривая ra2 (rpf) дает
минимальное расстояние
ra2 min как
функцию конечного перигейного расстояния rpf :
ra2 min » (450-570)×103
км. Другие сплошные кривые на рис. 5 дают минимальное расстояние от Луны rp, время
полета DtS, величину
импульса скорости DV(II) при
разгоне с ГСО – для данного оптимального варианта, при ra2=ra2
min. Для всех
этих решений выполняется с большим запасом условие (11) нестолкновения КА с
поверхностью Луны. Величина импульса скорости «обходной» схемы DV(II)
существенно меньше импульса DV(I) для случая
«прямого» спуска, DV(II) » 1,1 км/с, DV(I) - DV(II) ~
(0,4-1,9) км/с.
Если V¥ > V¥ min, то множество решений A в
пространстве V
образует
одну или две замкнутых кривых. За параметр на этом множестве решений взята
радиальная компонента V3r скорости V3 (это третий
параметр задачи), для одной кривой:
VMr
- V¥ <V3r min
(rpf, V¥) £ V3r £ V3r max (rpf, V¥) < VMr+V¥,
(15)
причем для
каждого значения V3r внутри (15) имеется два решения,
см. рис. 9а, где представлено множество A для варианта, когда это множество есть одна кривая,
причем V3r = V3r
min в точке A1 и V3r = V3r max в точке A2. Точки пересечения сферы S (7) и
гиперболоида H (9) можно определить,
рассматривая, например, их сечения плоскостью Vr=V3r=const:
СH: ![]() (16a)
(16a)
СS: ![]() (16b)
(16b)
Здесь взяты
оси Vr,Vt, Vn . Из этих уравнений
получим (опуская для краткости индекс 3) координаты ![]() двух точек
пересечения этих окружностей:
двух точек
пересечения этих окружностей:
![]() (17a)
(17a)
![]() (17b)
(17b)
Координаты Vm(i), Vb(i):
Vm(i)
=Vt(i) cos iM
–Vn(i) sin iM ; Vb(i)=Vt(i)
sin iM + Vn(i) cos iM; (18)
где
iM есть наклонение плоскости лунной орбиты к земному
экватору:
sin iM=VMr/VMt;
cos iM=VMm/VMt. (19)
На рис. 10
при фиксированных типичных значениях rpf (=6421 км)
и ra2 (=490
Рис. 10. Изменение
основных характеристик траектории возврата с ГСО к Земле при фиксированном
конечном расстоянии в условном перигее rpf =6421 км и апогейном расстоянии ra2 =490 тыс.
км.
Внизу на рисунке указана штриховая
прямая rp min =
Видна также однозначность функции DtS (V3r). В этом
проявляется более общее интересное свойство орбиты T3. Справедлива
Теорема. Для
орбиты T3 полета от
Луны к Земле при задании перигейного расстояния, скорости на «бесконечности» и
радиальной компоненты скорости отлета от Луны оба решения задачи имеют
одинаковые параметры в плоскости орбиты (большую полуось, истинную аномалию,
время перелета) и отличаются лишь ориентацией орбиты в пространстве.
Действительно, при V3r=const сечение
гиперболоида H в пространстве
скоростей V
есть окружность ![]() =с, поэтому оба решения имеют одинаковую скорость и,
следовательно, при заданности расстояния (2), одинаковую константу энергии и
большую полуось орбиты. Далее, в силу заданности перигейного расстояния (8) для
обоих решений получим одни и те же значения эксцентриситета и апогейного
расстояния. Из этого и из равенства радиальной скорости следует равенство
истинной аномалии при t=t2 и полное
совпадение параметров в плоскости орбиты для обоих решений. Конечно, различными
будут наклонения орбит i3, как и параметры селеноцентрического движения
(например, d,
rp).
=с, поэтому оба решения имеют одинаковую скорость и,
следовательно, при заданности расстояния (2), одинаковую константу энергии и
большую полуось орбиты. Далее, в силу заданности перигейного расстояния (8) для
обоих решений получим одни и те же значения эксцентриситета и апогейного
расстояния. Из этого и из равенства радиальной скорости следует равенство
истинной аномалии при t=t2 и полное
совпадение параметров в плоскости орбиты для обоих решений. Конечно, различными
будут наклонения орбит i3, как и параметры селеноцентрического движения
(например, d,
rp).
Штриховые кривые на рис. 5 также
соответствуют случаю, когда V¥
> V¥ min, причем
для определенности здесь взято V¥
(rpf) = V¥ min+0,1 sp, скорость V3r принята
равной радиальной скорости Луны: V3r=VMr, а из двух
решений задачи взято решение с бóльшим углом наклона орбиты T3
к
экватору Земли. Импульс скорости DV(II) здесь практически тот же, что в
оптимальном случае V¥ = V¥ min,
DV(II)<DV(I).
ЗАМЕЧАНИЯ
1. Выше рассмотрен переход с орбиты. При переходе из
начальной точки ГСО следует или сначала выполнить «дрейф» КА из этой начальной
точки в точку, соответствующую «обходному» спуску с орбиты, или подбором
начального времени обеспечить дополнительное условие на долготу начальной
точки. Последнее можно сделать, например, введением пассивного витка на участке
разгона КА с ГСО. Это выгодно также для уменьшения гравитационных потерь и
расхода топлива при разгоне.
2. Из-за ошибок работы
двигателя при разгоне КА с ГСО фактическая орбита будет отличаться от
расчетной, и может потребоваться коррекция траектории, чтобы обеспечить
вхождение КА в допустимую «трубку» подлета к Земле, с допустимым отклонением от
заданного конечного расстояния в условном перигее.
3. При необходимости
обеспечить в конце полета, кроме перигейного расстояния, некоторое
дополнительное условие, например наклонение орбиты, можем для этого
использовать параметр на множестве решений, например, радиальную скорость V3r,
см. рис. 10.
5. ВЫВОДЫ
Суммируя результаты анализа
задачи, можем сделать вывод, что использование гравитационного поля
Луны позволяет осуществить «обходные» слабоэнергетические траектории
возвращения с ГСО к Земле с пассивным уменьшением перигейного расстояния орбиты КА. Это дает
возможность реализовать полет с ГСО к Земле заметно более экономично, при
мéньшем расходе топлива, хотя и приводит к бóльшему времени
полета и требует более точной системы управления, чем для обычных, «прямых»
перелетов КА.
Данное исследование выполнено при поддержке Российского Фонда
Фундаментальных исследований (Гранты 06-01-00531а, НШ-2003.2003.1).
6.
СПИСОК ЛИТЕРАТУРЫ
1.
Ивашкин В.В. О траекториях возвращения космического
аппарата с геостационарной орбиты к Земле при использовании гравитационного
поля Луны. // Актуальные проблемы космонавтики: Труды XXX Академических чтений по космонавтике. Москва, январь
2.
Ивашкин В.В., Тупицын Н.Н. Об использовании
гравитационного поля Луны для выведения космического аппарата на стационарную
орбиту спутника Земли. // Препринт, Институт прикладной математики Академии наук
СССР, Москва, 1970. 32 с.
3.
Ивашкин В.В., Тупицын Н.Н. Об использовании
гравитационного поля Луны для выведения космического аппарата на стационарную
орбиту спутника Земли. // Космические исследования. 1971, т. IX, вып. 2, c. 163-172.
4.
Ивашкин В.В. Оптимизация космических маневров при
ограничениях на расстояния до планет. М.: Наука, 1975, 392 с.
5. Graziani F., Gastronuovo M.M. and Teofilatto P.
Geostationary obits from mid-latitude launch sites via lunar gravity assist. //
American
Astronautical Society Publications,
Advances in Astronautical Sciences. V. 84. 1993. AAS 93-289. P. 561-572.
6.
Sternfeld A.
Sur les trajectoires permettant d'approcher d'un corps attractifs central
à partir d'une orbite Keplérienne donnée. // Comptes rendus de l’Académie des Sciences (Paris), 1934, vol. 198. Р. 711— 713.
7.
Штернфельд А.А. Введение в космонавтику. а)
8.
Цандер Ф.А. Перелеты на другие
планеты (Теория межпланетных путешествий). // В кн.: Пионеры
ракетной техники: Кибальчич. Циолковский. Цандер. Кондратюк. Избранные труды,
М.: Наука, 1964. С. 277-359.
9. Riebe T., and Schweitzer M. Space operations and
support. // AEROSPACE AMERICA, Dec. 1998, p. 83.
10. Ivashkin V.V. Lunar space projects. // American
Astronautical Society Publications, Science and Technology Series, Vol. 108, 2004. Proceedings of the International Lunar Conference 2003,
November 16-22, 2003, Hawaii Island, USA. Eds: Steve M. Durst, et al. AAS
03-763. P. 481-499.
11. Ивашкин
В.В., Райкунов Г.Г. Оптимальное обслуживание системы ИСЗ. // Известия Академии
Наук. Техническая кибернетика. 1993. N 1. С.
111–120.
12. Ивашкин В.В.
О траекториях возвращения космического аппарата с геостационарной орбиты к
Земле с использованием гравитационного маневра у Луны. // Доклады Академии
наук, 2006. В печати.
13. Ивашкин
В.В. О траекториях полета точки к Луне с временным захватом ее Луной. //
Доклады Академии наук, 2002, том 387, N 2, с. 196-199.
14. Ивашкин
В.В. О траекториях полета точки от Луны к Земле с гравитационным освобождением
от лунного притяжения. // Доклады Академии Наук, 2004, том 398, N 3, с. 340-342.
15. Степаньянц
В.А., Львов Д.В. Эффективный алгоритм решения системы дифференциальных
уравнений движения. // Математическое моделирование. 2000, т. 12, вып. 6, с.
9-14.
16. Ивашкин
В.В. Ари Штернфельд и космонавтика. // Препринт, ИПМ им. Келдыша РАН, 2005, N 20. 32 с. http://www.keldysh.ru/papers/2005/source/prep2005_20.pdf.
17. Ивашкин
В.В. Научное наследие А.А.Штернфельда. // Сборник: Штернфельд А.А. «Меня
считали неизлечимым фантастом…» М.: Политехнический музей. 2005. С. 8-27.
18. Ивашкин
В.В. Лунные траектории нового типа и роль гравитационных возмущений в их
формировании. // Международный симпозиум «Астрономия 2005 – современное
состояние и перспективы», 1–6 июня 2005 года, Россия, Москва. а) Труды ГАИШ МГУ,
т.
б)
http://www/keldysh/ru/paper/2005/source/article/IAS-05/pdf .