Труды 3-его Совещания “Управление движением малогабаритных спутников”
|
|
От редактора ………………………………………………. |
3 |
|
Ю.Г.Мартыненко,
А.В.Влахова, Т.Карлос. Оценка
точности системы пассивной магнитной стабилизации искусственного спутника
Земли……………………………………………………………………….. |
3 |
|
Н.В.Куприянова,
Д.С.Ролдугин. Алгоритм активного
магнитного управления для малого осесимметричного спутника ………………….. |
6 |
|
М. Баттальере, Ф. Пиерджентили. Определение фактической
ориентации микроспутника УНИСАТ-3 …………………. |
9 |
|
И.В.Прилепский. Исследование динамики
спутника с магнитной системой ориентации на струнном подвесе ………..…………………… |
13 |
|
С.С.Ткачёв. Использование второго
метода Ляпунова для построения закона управления маховичной системой
ориентации .………………... |
15 |
|
Х.Котсоми Палета. Анализ функций пространственного
распределения заряженных частиц широких атмосферных ливней по данным
установок Якутск, AGASA и МГУ ……………………………... |
19 |
|
Э.Понсе, Б.А.Хренов. Камера-обскура с
многоанодным фотоумножителем для получения изображения транзиентных световых
вспышек в верхней атмосфере ………………………………… |
22 |
От редактора
Начиная с 2004 года группой профессоров в составе
В.В.Александрова (МГУ им.М.В.Ломоносова), М.Ю.Овчинникова (ИПМ им.М.В.Келдыша
РАН и МФТИ), Филиппо Грациани (Аэрокосмическая Школа Римского университета “La Sapienza”, Рим, Италия) и Анны Герман (Университет Бейра
Интериор, Кувилья, Португалия) были организовано и проведено в России, Италии и
Португалии шесть международных совещаний (Workshops), ориентированных в
основном на студентов старших курсов, аспирантов и молодых исследователей,
занимающихся моделированием динамики микроспутников, разработкой их систем
ориентации и рассмотрением смежных вопросов. Встречи разноязычных студентов,
прошедших обучение не только в разных частях Европы, но и в разных полушариях
Земли, сочетание идеологий будущих инженеров и будущих исследователей,
использующих различные подходы к решению указанных проблем, несомненно,
приводит к их взаимному обогащению. Последнее совещание, проходившее в МГУ
10-11 апреля 2007 года при участии студентов и аспирантов из России, Италии и
Мексики (условием было представление докладов на русском языке), в основном
было посвящено алгоритмам управления микроспутниками.
М.Ю.Овчинников
Оценка точности системы пассивной магнитной
стабилизации искусственного спутника Земли
Ю.Г.Мартыненко,
А.В.Влахова, Т.Карлос
(Московский государственный университет им.
М.В.Ломоносова, Москва, Россия)
Разработка систем угловой
стабилизации искусственных спутников Земли (ИСЗ) была начата еще в середине
прошлого века (см. обзор [1, 2]). За это время было выполнено огромное число
исследований, позволивших создать стройную теорию ориентации орбитальных
объектов и сконструировать разнообразные системы управления угловым положением
спутников. В настоящее время возрастание интереса к проблемам стабилизации ИСЗ
стимулируется появлением нового класса малых спутников [3], для которых необходимы надежные и дешевые системы
управления ориентацией. Бесспорным лидером среди подобных систем являются
пассивные магнитные системы стабилизации, которые отличаются простотой
изготовления и исключительной надежностью. В состав этих систем обычно входит
один или несколько постоянных магнитов, закрепленных вдоль ориентируемой оси
спутника, и наборы гистерезисных стержней из магнитомягкого материала. Величина
собственного магнитного момента системы постоянных магнитов должна быть
достаточной для создания восстанавливающего момента, необходимого для
ориентации оси спутника вдоль вектора напряженности геомагнитного поля Земли.
Перемагничивание гистерезисных стержней во время полета обеспечивает
рассеивание энергии вращательного движения спутника, возникающей на начальном
этапе, и демпфирование случайных возмущений. Пассивные магнитные системы
применяются в случаях, когда выполняемые ИСЗ задачи не требуют высокой точности
ориентации и выполнения сложных программных разворотов.
Вместе с тем в теории систем
пассивной магнитной стабилизации еще остались нерешенные вопросы, которые
связаны с многозначностью функций, описывающих гистерезисные петли,
существенным разнесением частот составляющих движения, резонансными явлениями,
хаотизацией движений спутника [4], возникновением скользящих режимов и т.д.
Целью
данной работы является создание математической модели, численный анализ которой
позволяет оценивать точность пассивной магнитной стабилизации малогабаритного
ИСЗ. Центр масс спутника движется по произвольной кеплеровой орбите. Для
описания магнитного поля Земли используется модель косого (наклонного) диполя [5], которая учитывает отклонение оси диполя
геомагнитного поля Земли от оси вращения Земли на постоянный угол ![]() .
.
Вектор
магнитной напряженности в точке пространства с радиус – вектором ![]() определяется формулой
[2, 5]
определяется формулой
[2, 5]
где ![]() - величина дипольного
момента,
- величина дипольного
момента, ![]() - единичный вектор по
направлению оси диполя,
- единичный вектор по
направлению оси диполя, ![]() - единичный вектор по
направлению
- единичный вектор по
направлению ![]() .
.
Для описания углового положения
спутника с его центром масс ![]() связываются системы
координат
связываются системы
координат ![]() и
и ![]() . Ось
. Ось ![]() направлена по продолжению
радиус-вектора
направлена по продолжению
радиус-вектора ![]() центра масс спутника,
ось
центра масс спутника,
ось ![]() – перпендикулярно
плоскости орбиты, ось
– перпендикулярно
плоскости орбиты, ось ![]() – образует правую тройку
с единичными векторами осей
– образует правую тройку
с единичными векторами осей ![]() ,
, ![]() и направлено с сторону
касательной к орбите спутника. Оси системы координат
и направлено с сторону
касательной к орбите спутника. Оси системы координат ![]() направлены по главным
центральным осям инерции спутника.
направлены по главным
центральным осям инерции спутника.
Движение ИСЗ относительно центра масс описывается
следующими уравнениями:
 .
.
Здесь ![]() ,
, ![]() ,
, ![]() - углы курса, тангажа
и крена, определяющие ориентацию спутника относительно системы координат
- углы курса, тангажа
и крена, определяющие ориентацию спутника относительно системы координат ![]() ,
, ![]() ,
, ![]() ,
, ![]() - проекции вектора
угловой скорости ИСЗ на оси системы координат
- проекции вектора
угловой скорости ИСЗ на оси системы координат ![]() ,
, ![]() - истинная аномалия,
определяющая положение центра масс спутника на орбите,
- истинная аномалия,
определяющая положение центра масс спутника на орбите, ![]() ,
, ![]() ,
, ![]() - его главные моменты
инерции относительно осей
- его главные моменты
инерции относительно осей ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – проекции главного
момента внешних сил,
– проекции главного
момента внешних сил, ![]() - эксцентриситет,
- эксцентриситет, ![]() - фокальный параметр
орбиты,
- фокальный параметр
орбиты, ![]() - радиус Земли,
- радиус Земли, ![]() - ускорение свободного
падения.
- ускорение свободного
падения.
Пренебрегая
моментами всех прочих сил (гравитационных, аэродинамических, светового давления
и т.д.) по сравнению с магнитным моментом, примем главный момент действующих на
спутник сил, равным [5]
![]() .
.
Здесь ![]() - магнитный момент
спутника, в котором не учитывается момент от вихревых токов, наводимых в
проводящих деталях спутника [6],
- магнитный момент
спутника, в котором не учитывается момент от вихревых токов, наводимых в
проводящих деталях спутника [6], ![]() - дипольный момент
постоянного магнита, неизменный в осях
- дипольный момент
постоянного магнита, неизменный в осях ![]() ,
,  - магнитный момент
гистерезисных стержней, где
- магнитный момент
гистерезисных стержней, где ![]() - число стержней, входящих
в систему стабилизации.
- число стержней, входящих
в систему стабилизации.
При взаимодействии внешнего
геомагнитного поля с гистерезисным стержнем в стержне наводится магнитный
момент, который момент быть вычислен по формуле Корчинского [5]
 .
.Здесь
![]() ,
, ![]() - постоянные,
- постоянные, ![]() - единичный вектор по
направлению
- единичный вектор по
направлению ![]() -го стержня,
-го стержня, ![]() . В
петля гистерезиса, определяющая зависимость величины
вектора
. В
петля гистерезиса, определяющая зависимость величины
вектора ![]() от
от ![]() , имеет форму параллелограмма. Такая модель корректна в
случае, когда потери энергии за цикл перемагничивания стержней значительно
меньше энергии вращения спутника. При этом определяющим фактором при работе
пассивной системы стабилизации является не форма, а площадь петли гистерезиса.
, имеет форму параллелограмма. Такая модель корректна в
случае, когда потери энергии за цикл перемагничивания стержней значительно
меньше энергии вращения спутника. При этом определяющим фактором при работе
пассивной системы стабилизации является не форма, а площадь петли гистерезиса.
При ![]() уравнения
имеют особенность и для численного анализа уравнений
ИСЗ удобно задавать угловую ориентацию спутника в орбитальной системе координат
при помощи кватерниона
уравнения
имеют особенность и для численного анализа уравнений
ИСЗ удобно задавать угловую ориентацию спутника в орбитальной системе координат
при помощи кватерниона ![]() , удовлетворяющего условию нормировки
, удовлетворяющего условию нормировки
![]() .
.
Кинематические уравнения для
кватерниона представляют собой линейные дифференциальные уравнения четвертого
порядка [7]
Здесь точка
означает дифференцирование по времени ![]() .
.
При движении спутника по орбите
величина и направление вектора напряженности геомагнитного поля Земли непрерывно
изменяются, что делает принципиально невозможным обеспечение точной ориентации
спутника. Математически это выражается в зависимости правых частей дифференциальных
уравнений движения спутника от времени и отсутствии «простых» стационарных
решений. Постоянно действующие возмущения могут приводить к возникновению
резонансных колебаний спутника.
При выполнении численных
экспериментов с построенной математической моделью движения ИСЗ использовались
параметры системы пассивной магнитной стабилизации первого Российского
наноспутника ТНС-0, успешно выведенного на орбиту с борта Международной
космической станции в марте 2005 г. [3].
В результате математического
моделирования углового движения спутника на разных орбитах, проведенного при
помощи пакета компьютерной алгебры Mathematica, исследованы влияние
эллиптичности орбиты, суточного движения Земли, параметров ИСЗ и начальных
условий на точность системы пассивной магнитной стабилизации. В результате
численных экспериментов получены следующие результаты.
·
Увеличение ширины
петли гистерезиса в два раза практически вдвое уменьшает время демпфирования
колебаний и почти не влияет на точность стабилизации ИСЗ.
·
Модель «косой
диполь» позволяет говорить о более «нерегулярном» движении спутника по
сравнению с моделью «прямой диполь». Ошибки ориентации оси спутника в обеих
моделях отличаются несущественно.
·
Для выбранного
диапазона варьирования магнитного момента увеличение последнего улучшает
точность стабилизации и слабо влияет на время демпфирования.
Литература
1.
Овчинников М.Ю. Системы ориентации спутников: от Лагранжа до Королева.
//Соросовский Образовательный Журнал. 1999. №12. С. 91-96.
2.
Сарычев В.А., Овчинников М.Ю. Магнитные системы ориентации искусственных спутников
Земли. Итоги науки и техники. Сер.: Исследование космического пространства. М.:
ВИНИТИ, 1985. Т.23.
3.
Куприянова Н.В., Овчинников М.Ю., Пеньков В.И.,
Селиванов А.С. Пассивная
магнитная система ориентации первого российского наноспутника ТНС-0. Препринт №
46. М.: ИПМ им. М.В. Келдыша РАН, 2005.
4.
Белецкий В.В. Регулярные и
хаотические движения в задаче ориентации спутника - Препринт № 53. М.: ИПМ им.
М.В. Келдыша АН СССР, 1990.
5.
Белецкий В.В., Хентов А.А. Вращательное
движение намагниченного спутника. М.: Наука, 1985.
6.
Мартыненко Ю.Г. Движение
твердого тела в электрических и магнитных полях. М.: Наука, 1988.
7.
Мартыненко Ю.Г. Методика изложения кинематики твердого тела с одной
неподвижной точкой. //Сборник
научно-методических статей по теоретической механике. М.: Изд-во МГУ, 2003. № 24.
С. 3-10.
Алгоритм
активного магнитного управления для малого осесимметричного спутника
Н.В.Куприянова,
Д.С.Ролдугин
(Московский физико-технический институт)
Рассматривается малый
осесимметричный спутник, который необходимо ориентировать вдоль местного
вектора индукции геомагнитного поля. Предлагается использовать активную систему
ориентации, состоящую из трех токовых катушек, расположенных вдоль главных осей
инерции аппарата, трехосного магнитометра и солнечных датчиков.
Спутник представляет цилиндрическое
твердое тело. Изучается движение в постоянном магнитном поле (модельная
постановка), учитывается влияние только магнитного момента. Для записи
уравнений движения спутика относительно центра масс используются следующие
правые системы координат:
![]() - система координат,
связанная с вектором
- система координат,
связанная с вектором ![]() индукции геомагнитного
поля, вектор
индукции геомагнитного
поля, вектор ![]() направлен вдоль оси
направлен вдоль оси ![]() .
. ![]() - центр масс спутника.
- центр масс спутника.
![]() - система координат,
связанная со спутником. Оси направлены вдоль главных осей инерции. Ось
- система координат,
связанная со спутником. Оси направлены вдоль главных осей инерции. Ось ![]() направлена вдоль оси
симметрии.
направлена вдоль оси
симметрии.
Положение системы ![]() относительно
относительно ![]() задается с помощью
углов Эйлера (
задается с помощью
углов Эйлера (![]() - угол прецессии,
- угол прецессии, ![]() - угол нутации,
- угол нутации, ![]() - угол собственного
вращения). В системе координат
- угол собственного
вращения). В системе координат ![]() уравнения движения
принимают вид
уравнения движения
принимают вид
 ,
,
где ![]() - главные моменты
инерции,
- главные моменты
инерции, ![]() - дипольные моменты
токовых катушек вдоль соответствующих осей,
- дипольные моменты
токовых катушек вдоль соответствующих осей, ![]() - модуль вектора
индукции магнитного поля. Катушка, создающая дипольный момент вдоль оси
симметрии, работает как постоянный магнит, полагаем ее дипольный момент
постоянным и равным
- модуль вектора
индукции магнитного поля. Катушка, создающая дипольный момент вдоль оси
симметрии, работает как постоянный магнит, полагаем ее дипольный момент
постоянным и равным ![]() . Дипольные моменты двух других катушек принимают значения
. Дипольные моменты двух других катушек принимают значения ![]() ,
, ![]() . Кинематические соотношение Эйлера имеют вид
. Кинематические соотношение Эйлера имеют вид
 .
.
В случае, когда на спутнике
включена только одна катушка, создающая момент вдоль оси симметрии (![]() ,
, ![]() ) существует функция Ляпунова
) существует функция Ляпунова
![]() .
.
В силу уравнений движения
производная этой функции равна нулю и движение является устойчивым.
В случае работы трех токовых
катушек можно построить функцию ![]() , как в случае работы одной катушки, и управлять значением ее
производной, которое должно быть неположительным
, как в случае работы одной катушки, и управлять значением ее
производной, которое должно быть неположительным
![]() ,
,
где ![]() - компоненты вектора
индукции магнитного поля в связанных координатах. Предлагается следующий
алгоритм управления катушками:
- компоненты вектора
индукции магнитного поля в связанных координатах. Предлагается следующий
алгоритм управления катушками:
 .
.
Было проведено численное
моделирование алгоритма управления. На рис.1 изображена зависимость проекции
вектора индукции геомагнитного поля на экваториальную плоскость спутника от
времени. На рис.2 представлено изменение проекции вектора индукции на ось
симметрии спутника (ориентируемую ось) при движении спутника по орбите.
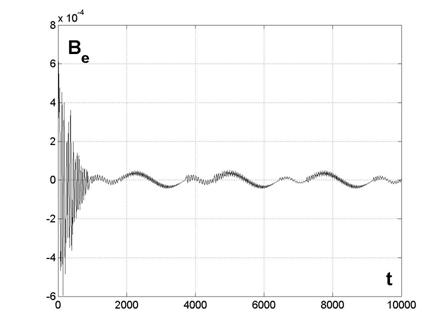
Рис.1.
Зависимость проекции вектора индукции геомагнитного поля на экваториальную
плоскость спутника от времени. Время измеряется в секундах, индукция поля – в
теслах
Для управления спутником необходимо
в режиме реального времени знать значения компонент вектора индукции и скорости
вращения. Компоненты вектора индукции в связанной системе координат
определяются с помощью магнитометра. В случае, когда на спутнике работает одна
токовая катушка, расположенная вдоль оси симметрии (эквивалентно ориентации с
помощью постоянного магнита), движение представляет собой регулярную прецессию
вокруг вектора напряженности. В случае работы трех токовых катушек движение так
же можно рассматривать как прецессию. Тогда по изменению компонент ![]() можно оценить величину
скорости собственного вращения
можно оценить величину
скорости собственного вращения ![]() . Используя показания двух солнечных датчиков, расположенных
на основаниях цилиндра, можно оценить величину угла нутации
. Используя показания двух солнечных датчиков, расположенных
на основаниях цилиндра, можно оценить величину угла нутации ![]() , скорость его изменения
, скорость его изменения ![]() и скорость
и скорость ![]() , а, значит, получить оценки компонент скорости вращения в
связанной системе координат.
, а, значит, получить оценки компонент скорости вращения в
связанной системе координат.

Рис.2.
Зависимость проекции вектора индукции геомагнитного поля на ось симметрии
спутника от времени. Время измеряется в секундах, индукция поля – в теслах
Работа поддержана РФФИ (грант 06-01-00389), Роснаукой
(Гос.контракт N 02.514.11.4011) и Программой поддержки ведущих научных школ
России (грант НШ-2448.2006.1).
Определение
фактической ориентации микроспутника УНИСАТ-3
М.
Баттальере, Ф. Пиерджентили
(Аэрокосмическая Школа Римского Университета “La SApienza”, Рим, Италия)
Тема
доклада - изучение фактической ориентации микроспутника Унисат-3, который был
запущен на орбиту ракетой-носителем «ДНЕПР» с космодрома Байконур в 2004 году.
Унисат-3 - это третий учебный микроспутник, запущенный для исследований,
проводимых Аэрокосмической Школой Университета “La Sapienza” (рис.1). Спутник
был создан группой студентов, возглавляемой профессором Филиппо Грациани и
научными сотрудниками Школы. Основные характеристики спутника
Унисат-3: масса - 10/14 килограмм; орбита - круговая, солнечно-синхронная,
высотой 750 километров; конструкция - Унисат-3, как все спутники серии Унисат,
имеет форму октогональной призмы; каждая сторона призмы имеет ширину 15 см и
высоту 25 см; система стабилизации - пассивная магнитная; радиоканал - VHF и
UHF; система энергообеспечении - мы используем панели с солнечными элементами с
тремя переходами и с кремневыми элементами.

Рис.1. Унисат 3 выведен на орбиту ракетой-носителем
«ДНЕПР» с космодрома Байконур в 2004 году, по сей день находится в рабочем
состоянии
Чтобы узнать ориентацию спутника Унисат-3, мы
используем измерения с магнитометров и солнечных панелей. Как датчики
ориентации мы используем три магнитометра, связанные с осями спутника, и как
солнечные датчики мы используем три солнечные панели, расположенные
перпендикулярно друг другу (рис.2). Эти три солнечные панели сконструированы с
использованием трех разных типов технологий.
Рис.2. Оси спутника и солнечные
взаимно-перпендикулярные панели
Мы определяем ориентацию спутника сравнением между
направлением вектора Солнце-спутник и вычисленным по орбитальному движению
вектором магнитной индукции диполя Земли с измеренными на борту спутника их
направлениями. Мы используем три взаимно-перпендикулярные солнечные панели,
чтобы определить положение Солнца в системе координат, связанной с главными
осями инерции спутника. У нас были разные пробпемы на орбите:
·
первая проблема
была в том, что нам надо знать максимум тока панели по орбите, чтобы посчитать
угол между солнечными панелями и направлением на Солнце.
·
вторая проблема
была в том, что у нас было ошибка на оси «Z» магнитометра во время запуска
спутника на орбиту.
·
третья проблема
была в том, что мы не знали напряжение на осях Х и У. На самом деле, по осям Х
и У есть “шум”, потому что на борту спутника есть магнитный диполь и
гистерезисные стержни, и этот шум трудно предсказать заранее.
Итак,
сформулируем гипотезы: мы знаем магнитную индукция диполя Земли в инерциальной
системы координат из модели «IGRF» и эфемерид; мы знаем угол между направлением
на Солнце и магнитным диполем Земли.
Чтобы
определить максимум неизвестного тока на орбите, мы использовали два разных
метода:
·
первый метод
использует измерения трех перпендикулярных панелей во время движения на
освещенной части орбиты. Зададим постоянный максимальный ток на орбите во время
одного прохода над станцией
·
Чтобы подтвердить
этот результат, мы используем второй метод во время одного специфического
положения, когда две панели переходят от освещенной части орбиты в тень. Это
подтверждает первый результат
Сейчас
надо знать магнитное поле Земли на борту спутника. Можно узнать компоненту «Z»,
потому что мы знаем две другие компоненты Х и У, и потому что можно узнать
погрешности на оси Х и У; на самом деле у нас есть другая информация - угол
между направленнем на Солнце и вектором магнитного поля Земли. С этой
информацией вычислим ориентацию спутника традиционным методом (рис.3).
Рис.3.
Результаты для угла между направлением на Солнце и вектором магнитной индукции
диполя Земли (точность около 10 градусов)
Благодарности
Благодарю проф. Филиппо Грациани, проф. Фабио Сантони
и доктора Фабрицио Пиерджентили за предоставленную мне возможность участия в
Программе Унисат и проф. Михаила Овчинникова за предложение выступить на этой
конференции и организацию моей стажировки в Москве.
Литература
1. F. Santoni, F.
Piergentili, Unisat-3 Attitude Determination using solar panel and magnetometer
data, IAC-05-C1.2.06, 2-6 Oct. 2006, Valencia, Spain.
2. F. Graziani, F.
Santoni, F. Piergentili, F. Bulgarelli, M. Sgubini, M. Ronzitti, M. L.
Battagliere, “UNISAT microsatellites: an affordable way to test in orbit
innovative technologies and ideas”, 23rd AIAA International Communications
Satellite Systems Conference (ICSSC-2005), 25-28 Sept., Rome, Italy.
Исследование
динамики спутника с магнитной системой ориентации на струнном подвесе
И.В.Прилепский
(Московский физико-технический институт)
В процессе создания новых образцов космической и
авиационной техники необходимо решать задачу экспериментальной отработки
соответствующих макетов в лабораторных условиях. При этом могут использоваться
различные экспериментальные установки – испытательные стенды, на которых должны
обеспечиваться условия, максимально приближенные к условиям реального полета.
Разработанный в Институте прикладной математики им. М.В. Келдыша РАН
лабораторный стенд (рис. 1) используется для анализа динамики макета
спутника с активной магнитной системой ориентации и тестирования алгоритмов
управления его угловым движением. Поскольку управляющий момент в таких системах
создается за счет взаимодействия собственного магнитного момента спутника с
окружающим геомагнитным полем, существенным элементом лабораторного стенда
является имитатор магнитного поля [1]. В некоторой области пространства (рабочей
области), куда и помещается макет спутника, создается магнитное поле ![]() , характеристики которого соответствуют геомагнитному полю
вдоль траектории спутника. Еще одним важным элементом лабораторного стенда
является струнный подвес, при помощи которого макет спутника помещается в
рабочую область. Следует отметить, что струнный подвес привлекает не только
простотой реализации, но накладывает сравнительно небольшие ограничения на
движение макета относительно центра масс, что особенно важно при тестировании
алгоритмов управления угловым движением макета. Собственный магнитный момент
спутника (макета)
, характеристики которого соответствуют геомагнитному полю
вдоль траектории спутника. Еще одним важным элементом лабораторного стенда
является струнный подвес, при помощи которого макет спутника помещается в
рабочую область. Следует отметить, что струнный подвес привлекает не только
простотой реализации, но накладывает сравнительно небольшие ограничения на
движение макета относительно центра масс, что особенно важно при тестировании
алгоритмов управления угловым движением макета. Собственный магнитный момент
спутника (макета) ![]() создается
установленными на нем токовыми катушками. При этом требуемая величина и
направление магнитного момента обеспечивается выбором соответствующих значений
токов, пропускаемых через катушки.
создается
установленными на нем токовыми катушками. При этом требуемая величина и
направление магнитного момента обеспечивается выбором соответствующих значений
токов, пропускаемых через катушки.
В докладе предложена математическая модель макета (твердого тела) на струнном подвесе (рис. 2)

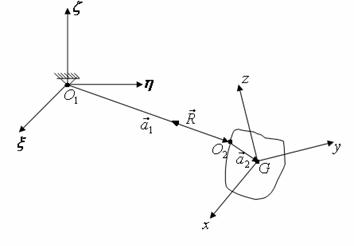
Рис. 1
Рис. 2


Здесь ![]() - управляющий
момент, который синтезируется в
соответствии с конкретным алгоритмом управления.
- управляющий
момент, который синтезируется в
соответствии с конкретным алгоритмом управления.
При численном моделировании управляемого движения
макета на стенде рассмотрены два алгоритма гашения нутационных колебаний и один
алгоритм раскрутки [2]. Основное внимание уделяется оценке эффективности
алгоритмов управления при различных значениях параметров системы –
массово-инерционных характеристик макета (![]() ,
, ![]() ), смещения точки подвеса макета к струне относительно его
центра масс (|
), смещения точки подвеса макета к струне относительно его
центра масс (|![]() |), длины струны (|
|), длины струны (|![]() |), параметров алгоритма управления.
|), параметров алгоритма управления.
В результате установлено, что эффективность работы алгоритмов демпфирования (в качестве меры эффективности принято время, за которое рассеивается 90% начальной энергии) определяется главным образом массой макета и смещением точки подвеса, причём эта зависимость является монотонной (рис. 3).
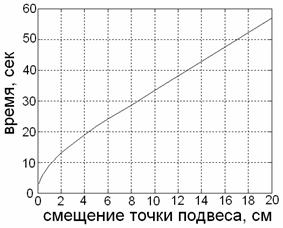
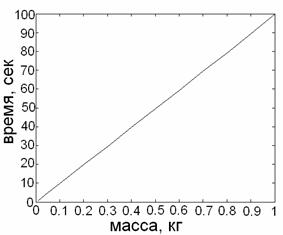
Рис. 3. Зависимость эффективности демпфирования от
смещения точки подвеса и массы макета
Этот вывод, вообще говоря,
неудивителен, поскольку возмущающий механический момент, действующий на тело со
стороны струны, имеет порядок ![]()
Что касается зависимости эффективности демпфирования
от других параметров, например, от длины струны (рис. 4), то она уже
немонотонна, причём эффективность резко падает при сближении значений двух
характерных частот системы ![]() и
и ![]() .
.
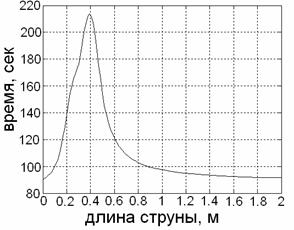
Рис. 4.Зависимость эфективности демпфирования от длины струны.
Работа поддержана РФФИ (грант 07-01-00040), Роснаукой
(Гос.контракт N 02.514.11.4011) и Программой поддержки ведущих научных школ
России (грант НШ-2448.2006.1).
Литература
1. Овчинников М.Ю., Цветков Е.А. Проектирование имитатора геомагнит-ного поля в составе лабораторного стенда для отработки способов управления ориентацией микроспутников. Препринт ИПМ им. М.В.Келдыша РАН, 2005, №55.
2. Ильин А.А., Овчинников М.Ю., Пеньков В.И. Алгоритмы магнитной ориентации спутника, стабилизируемого собственным вращением. Препринт ИПМ им. М.В.Келдыша РАН, 2005, №19.
Использование
второго метода Ляпунова для построения закона управления маховичной системой
ориентации
С.С.Ткачёв
(Московский физико-технический институт)
Системы ориентации условно можно разделить на два типа. К первому относятся те, которые для своей работы используют внешние поля, такие как, например, магнитные или гравитационные. К ним относятся магнитные и гравитационные системы ориентации. Ко второму типу можно отнести все системы, работа которых не требует наличия внешних полей. Примером таких систем являются маховичные, принцип работы которых основан на сохранении суммарного кинетического момента системы спутник-маховики. Их достоинством является как раз то, что их можно использовать тогда, когда действие, например, гравитационного или магнитного полей является мешающим фактором или оно слишком слабое, чтобы строить эффективное управление. В настоящей работе речь идёт именно о таких системах.
Будем рассматривать движение аппарата, управляемого
тремя маховиками, оси вращения которых расположены вдоль главных центральных
осей инерции спутника. Требуется так управлять этими маховиками, чтобы спутник
постоянно отслеживал заданное направление в пространстве, к примеру,
направление на Солнце. Это может быть необходимо, например, для того, чтобы
эффективно работали солнечные батареи. Тогда введём две правые прямоугольные
системы координат. Первая – это связанная со спутником система координат ![]() , оси которой направление по его главным центральным
осям инерции. Вторая система
, оси которой направление по его главным центральным
осям инерции. Вторая система ![]() связана с
центром масс спутника. Одна из ее осей направлена на Солнце, вторая ось
перпендикулярна плоскости эклиптики, а третья достраивает ее соответствующим
образом до правой. Целью управления является совмещение этих систем координат и
обеспечение устойчивости такого положения.
связана с
центром масс спутника. Одна из ее осей направлена на Солнце, вторая ось
перпендикулярна плоскости эклиптики, а третья достраивает ее соответствующим
образом до правой. Целью управления является совмещение этих систем координат и
обеспечение устойчивости такого положения.
Угловое движение спутника описывается динамическим уравнением в векторной форме
![]() ,
,
где ![]() - кинетический момент спутника,
- кинетический момент спутника, ![]() - его тензор инерции тела вместе с маховиками,
- его тензор инерции тела вместе с маховиками, ![]() - тензор инерции, составленный из моментов инерции маховиков,
- тензор инерции, составленный из моментов инерции маховиков,
![]() - абсолютная угловая скорость спутника в связанных осях,
- абсолютная угловая скорость спутника в связанных осях, ![]() - вектор, компонентами которого являются угловые скорости, с
которыми вращаются маховики относительно спутника, что собственно и является
управлением. Пусть теперь ориентация тела задаётся матрицей направляющих
косинусов А связанной системы координат относительно системы
- вектор, компонентами которого являются угловые скорости, с
которыми вращаются маховики относительно спутника, что собственно и является
управлением. Пусть теперь ориентация тела задаётся матрицей направляющих
косинусов А связанной системы координат относительно системы ![]() , тогда угловую скорость аппарата в связанных осях можно
записать следующим образом:
, тогда угловую скорость аппарата в связанных осях можно
записать следующим образом:
![]() .
.
Здесь ![]() - угловая скорость системы координат, отслеживающей
направление на Солнце, а
- угловая скорость системы координат, отслеживающей
направление на Солнце, а ![]() - угловая скорость связанной системы координат относительно
системы координат
- угловая скорость связанной системы координат относительно
системы координат ![]() . Таким образом, получаем следующую систему уравнений,
описывающую движение спутника:
. Таким образом, получаем следующую систему уравнений,
описывающую движение спутника:
![]()
Как известно [1], ![]()
 .
.
Далее, строим функцию Ляпунова для этой механической
системы в виде
![]() ,
,
где ![]() - диагональные
элементы матрицы A. Требуемая ориентация достигается когда
- диагональные
элементы матрицы A. Требуемая ориентация достигается когда ![]() , а диагональные элементы матрицы направляющих косинусов
равны единице. Производную функции V перепишем с учётом уравнений движения в
следующей форме:
, а диагональные элементы матрицы направляющих косинусов
равны единице. Производную функции V перепишем с учётом уравнений движения в
следующей форме:
![]() .
.
Здесь ![]() . Для асимптотической устойчивости рассматриваемого положения
равновесия требуется, чтобы
. Для асимптотической устойчивости рассматриваемого положения
равновесия требуется, чтобы ![]() (теорема Барбашина-Красовского [2]). Поэтому потребуем
выполнения следующего равенства [3]:
(теорема Барбашина-Красовского [2]). Поэтому потребуем
выполнения следующего равенства [3]:
![]() .
.
Откуда окончательно получаем уравнение для определения закона управления скоростью вращения маховиков
![]() .
.
Для иллюстрации приведём результаты численного интегрирование этого уравнения с учётом следующих начальных условий и параметров системы:
![]()
Орбита выбрана круговой с наклонением 70°. Далее приведены графики для направляющих косинусов, угловой скорости, управляющих угловых скоростей маховиков, а так же функции Ляпунова.
Рис.1. Изменение направляющих косинусов оси ![]() и компонент вектора
относительной угловой скорости спутника
и компонент вектора
относительной угловой скорости спутника
Рис.2. Изменение угловой скорости маховиков и функции
Ляпунова
Как видно из графиков, получается достаточно эффективное управление, позволяющее полностью погасить начальную закрутку и выйти на заданный режим. Отрадным является тот факт, что не происходит насыщения маховиков, что позволяется надеяться на возможность реализации этого алгоритма управления.
Работа поддержана РФФИ (грант 06-01-00389), Роснаукой
(Гос.контракт N 02.514.11.4011) и Программой поддержки ведущих научных школ России
(грант НШ-2448.2006.1).
Литература
1.
Г.Н.Яковенко. Краткий курс теоретической механики. М.: Бином. Лаборатория знаний. 2006. – 116 с.
2.
Г.Н.Яковенко. Краткий курс аналитической динамики. М.: Бином. Лаборатория
знаний. 2006.
– 238 с.
3. F.Fiorilli, Attitude control for a
small satellite with reaction wheels, Master Degree Thesis, Roma University “La
Sapienza”, 2006
Анализ
функций пространственного распределения заряженных частиц широких атмосферных
ливней по данным установок Якутск, AGASA и МГУ
Х.Котсоми
Палета
(НИИЯФ МГУ им.М.В.Ломоносова и Автономный университет Пуэбла, Мексика)
Проведено сравнение экспериментальных пространственных распределений заряженных частиц, полученных на различных установках. Показано, что данные установок МГУ и AGASA могут быть согласованы друг с другом.
Введение
Исследование широких
атмосферных ливней (ШАЛ) является единственным методом изучения космических
лучей сверхвысоких энергий. На большинстве наземных установок по изучению
первичных космических лучей сверхвысоких энергий методом ШАЛ в качестве
классификационного параметра для построения энергетического спектра
используется полное число заряженных частиц, если первичная энергия ![]() не превосходит
не превосходит ![]() эВ. Определение полного числа частиц в ШАЛ производится с
использованием какой-либо априорной функции пространственного распределения
(ФПР) заряженных частиц.
эВ. Определение полного числа частиц в ШАЛ производится с
использованием какой-либо априорной функции пространственного распределения
(ФПР) заряженных частиц.
При энергии ![]() эВ в качестве классификационного параметра ШАЛ обычно
используется плотность заряженных частиц на расстоянии 600 м от оси. Во всех
случаях знание ФПР заряженных частиц является необходимым условием для анализа
данных установки.
эВ в качестве классификационного параметра ШАЛ обычно
используется плотность заряженных частиц на расстоянии 600 м от оси. Во всех
случаях знание ФПР заряженных частиц является необходимым условием для анализа
данных установки.
Данные, полученные с установок, работающих в области выше ![]() эВ, немногочисленны и при этом противоречивы.
эВ, немногочисленны и при этом противоречивы.
На установках AGASA [1] и Якутск [2] использовались сцинтилляционные детекторы. Полученные на них ФПР заряженных частиц различаются как по форме функциональной зависимости, так и по поведению ФПР с увеличением первичной энергии. Данные установки AGASA хорошо описываются формулой:
![]()
 , (1)
, (1)
где ![]() =91.6 м,
=91.6 м, ![]() . Существенно, что параметр
. Существенно, что параметр ![]() не зависит от энергии.
Напротив, данные Якутска обнаруживают зависимость параметров ФПР от энергии.
не зависит от энергии.
Напротив, данные Якутска обнаруживают зависимость параметров ФПР от энергии.
В работе [3] было
показано, что ФПР AGASA может быть хорошо понята в рамках современных
теоретических представлений, тогда как экспериментальные данные Якутска нельзя
воспроизвести с удовлетворительной точностью. Это противоречие не исчерпывается
только формой ФПР, так как, по-видимому, оценка ![]() по
по ![]() на Якутской установке
завышена.
на Якутской установке
завышена.
На установке ШАЛ МГУ [4] было зарегистрировано около сотни событий с ![]() , которые ранее не рассматривались. В связи с отмеченным выше
противоречием есть смысл их проанализировать.
, которые ранее не рассматривались. В связи с отмеченным выше
противоречием есть смысл их проанализировать.
Экспериментальные
результаты и их обсуждение
Для работы с банком
экспериментальных данных установки ШАЛ МГУ был написан модифицированный вариант
программы, в которой для каждого ливня считывались первичные экспериментальные
данные и проводилась их обработка. Отбирались ливни, для которых выполнялись
следующие условия: ![]() ,
, ![]() , параметр s от 0.8 до 1.4. По методу максимума правдоподобия для данной
группы ливней c
числом частиц
, параметр s от 0.8 до 1.4. По методу максимума правдоподобия для данной
группы ливней c
числом частиц![]() (120 ливней) была построена
средняя ФПР и сопоставлена с
данными AGASA и Якутска. Было
учтено, что установка ШАЛ МГУ измеряет число заряженных частиц, а не отклик
сцинтилляционного детектора, как установки AGASA и Якутск. Кроме того, значения
(120 ливней) была построена
средняя ФПР и сопоставлена с
данными AGASA и Якутска. Было
учтено, что установка ШАЛ МГУ измеряет число заряженных частиц, а не отклик
сцинтилляционного детектора, как установки AGASA и Якутск. Кроме того, значения ![]() , полученные в различных работах, были пересчитаны к
одинаковой величине мольеровского радиуса, как это было сделано в [5].
, полученные в различных работах, были пересчитаны к
одинаковой величине мольеровского радиуса, как это было сделано в [5].
Как показано в [4], наилучшее описание экспериментальной ФПР, полученной на установке ШАЛ МГУ, достигается для функции
 , (2)
, (2)
где rm=80 м, s-возраст
ливня и величина α является функцией r.
Проведенный анализ
показал, что ФПР, используемые на установках Якутск и AGASA, плохо согласуются
друг с другом и демонстрируют
систематические отклонения. Сравнение показало также, что можно добиться
хорошего согласия ФПР ШАЛ МГУ и AGASA,
если изменить показатель степени при ![]() в формуле (1) с 1.2 на
1.04. Это можно сделать, так как установка ШАЛ МГУ расположена на большей
глубине, чем установка AGASA.
Расчёты, проведенные с использованием программы AIRES [6], подтвердили справедливость
такого вывода.
в формуле (1) с 1.2 на
1.04. Это можно сделать, так как установка ШАЛ МГУ расположена на большей
глубине, чем установка AGASA.
Расчёты, проведенные с использованием программы AIRES [6], подтвердили справедливость
такого вывода.
Сравнение данных ШАЛ МГУ и Якутска показало, что использование ФПР Якутска для описания данных установки ШАЛ МГУ не представляется возможным.
Результаты настоящей работы могут быть использованы при анализе экспериментальных данных установки Университета г.Пуэбла [7].
Автор благодарен Н.Н.Калмыкову и В.П.Сулакову за помощь в работе и
полезные обсуждения.
Литература
1. Yoshida S.,
Hayashida N., Honda K. et al. J. Phys. G: Nucl. Part. Phys. 1994, vol. 20, p.
651.
2. Глушков А. В.,
Правдин М. И., Слепцов И. Е., и др. Ядерная Физика, 2000, т.63, с.1
3. Raikin R. I.,
Layutin A. A., Inoue N. et al. Proc. 27th ICRC, Hamburg 2001, vol. 1, p. 290.
4. Fomin Yu. A.,
Kalmykov N. N., Kalmykov V. N. et al. Proc 28th ICRC, Tsukuba, 2003, vol. 1,
p.119.
5. Райкин Р.И.,
Масштабная инвариантность радиального распределения электронов в широких
атмосферных ливнях сверхвысоких энергий. Диссертация канд. физ.-мат. наук,
Барнаул, 2000.
6. Sciutto S. J., AIRES: A system for air shower
simulations (version 2.2.0), astro-ph/9911331 (216 pages).
7. O. Martinez, E. Moreno, G. Perez, H. Salazar and L.
Villasenor, Proc. 29th ICRC, Pune, 2005, vol. 6, p.217.
Камера-обскура
с многоанодным фотоумножителем для получения изображения транзиентных световых
вспышек в верхней атмосфере
Э.Понсе,
Б.А.Хренов
(НИИЯФ МГУ им.М.В.Ломоносова)
Создается портативная камера-обскура (камера с точечным отверстием и многоанодным фотоумножителем в качестве фотоприемника) с переменным фокусным расстоянием (переменным расстоянием между отверстием и фотоприемником). Фотоприемник работает в области ближнего УФ (длины волн 300-400 нм). Камера позволит получить изображение вспышек с различным разрешением в пространстве и во времени. Измерения с помощью камеры позволят проверить эффективность метода изучения атмосферных электрических разрядов по их изображению в УФ. Вместе с тем методика работы камеры обскура аналогична методу получения изображения с помощью зеркала-концентратора и матрицы фотоумножителей, применяемому для изучения флуоресцентного изображения диска ШАЛ (детектор ТУС). Электроника камеры-обскуры является прототипом электроники детектора ТУС. Измерения вспышек в атмосфере с помощью камеры-обскуры можно рассматривать как вклад в подготовку эксперимента TUS, так как эти измерения позволяют оценить роль фона сигналов, подобных сигналам ШАЛ.
Введение
Свечение ночной атмосферы в области ближнего ультрафиолета и, особенно, транзиентные вспышки в атмосфере являются источником фона в измерениях космических лучей ультра высоких энергий (КЛ УВЭ) по сигналу флуоресценции в атмосфере. Природа ультрафиолетовых атмосферных транзиентных событий неизвестна и поэтому необходимо накопить для них как можно больше экспериментальных данных. Исследование развития ультрафиолетовых транзиентных событий во времени и пространстве предлагается провести с помощью нового быстрого детектора изображения: камеры с точечным отверстием и многоканальным фотоумножителем (фотоприемником).
Экспериментальная
установка
Схема простой камеры с одним отверстием показана на рис.1(а). Фотоприемник представляет собой 64-анодный фотоэлектронный умножитель типа Hamamatsu Photonics H7546B. Испытания камеры будут проводиться в наземных условиях, но для основной работы по изучению вспышек в атмосфере прибор будет размещен на спутнике Земли.
Разрешение изображения в фотоприемнике, наблюдающем событие через отверстие, определяется расстоянием фотоприемника от отверстия. Поле зрения камеры определяется размером приемника. В нашем случае расстояние между основным фотоприемником и отверстием выбирается равным L= 20 см, размер фотоприемника из 64 ячеек 1.6х1.6 см, размер ячейки 2х2 мм. Через отверстие приемник осматривает поле зрения 0.16х0.16 рад с полем зрения ячейки 0.01 рад. Изменяя фокусное расстояние можно изменить разрешение и поле зрения камеры. В конструкции бокса камеры предусматривается возможность смены той части бокса, где находится отверстие.
(а) (б)
(б) (в)
(в)
Рис.1. а - схема расположения основных частей камеры
(точечного отверстия и фотоприемника), светонепроницаемый бокс не показан; б -
камера со многими отверстиями; в - второй фотоприемник, позволяющий определить
адрес отверстия, через которое принимается сигнал от данного события
Для предполагаемой орбиты спутника 400 км получаем, что одна ячейка фотоприемника будет собирать сигнал с площадки в атмосфере 4х4 км, и через одно отверстие приемник получает изображение события на площади атмосферы 32х32 км с разрешением 4 км. Диаметр отверстия выбираем так, чтобы площадь отверстия была равно площади ячейки приемника, это означает, что диаметр отверстия равен 2.26 мм.
Поле зрения прибора можно
увеличить при использовании большого числа отверстий (на рис.1б приведен пример камеры с 64
отверстиями), расстояние между которыми равно размеру фотоприемника (в нашем
примере – 2.6 мм). В таком случае камера-обскура равномерно перекрывает поле
зрения 256х256 км, но каждое событие
будет принято только одним отверстием. Для того, чтобы знать, какое именно
отверстие принимает сигнал вспышки, следует использовать второй фотоприемник,
расположенный ближе к приемнику, рис.1в.
В этом фотоприемнике разрешение значительно ниже, чем в первом - его фокусное
расстояние подбирается так, чтобы сигнал вспышки оставался только в одной
ячейке приемника. Адрес «сработавшей ячейки» дает адрес «сработавшего»
отверстия.
На рис.2 показан блок для испытания многоанодного ФЭУ типа H7546B. Фотоумножитель и светодиод находятся внутри блока. Блок-схема


Рис.2. Блока испытания многоанодного ФЭУ Н7546В
электроники основного ФЭУ показана на рис.3.
Светодиод, работающий от сигнала генератора, освещает фотоприемник. Аналоговый
сигнал снимается с анода канала фотоприемника и поступает на вход 64-канального
аналогового мультиплексора. Через мультиплексор каждый сигнал от анода попадает
на АЦП. Частота управления мультиплексором и АЦП равна 0.5 Мгц. Цифровый сигнал
от ячеек подается в программируемый чип ПЛИС (FPGA), и проводится запись данных каждой ячейки в
соответствующую циклическую оперативную память.
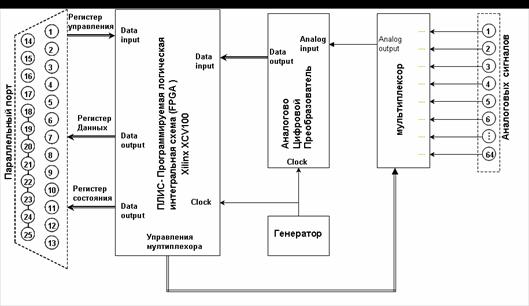
Рис.3 Блок- схема электроники
основного ФЭУ камеры обскуры
Через паралельный порт с помощью программы LabView в ПЛИС задается порог для записи цифровыех данных от
ячеек фотоприемника. Число шагов развертки уточняется при проектировании в
соответствии с возможностями памяти ПЛИС. Данные объединяются в центральном
чипе ПЛИС, где они используются для выработки триггера и вывода данных в
компьютер с помощью програма LabView.
Заключение
1.
Испытания камеры будут проводиться в Москве в ясные ночи. В первую очередь
будут проводиться измерения света от звезд, пересекающих ячейки. Для известных
звезд и доступных данных относительно прозрачности атмосферы (из обсерватории
МГУ) эти измерения позволят провести абсолютную калибровку камеры.
2.
На следующем этапе будет проведено измерение
ночного свечения атмосферы над Москвой. Будет проведен поиск
искусственных вспышек УФ, возникающих в городе (например, при искрении линий
троллейбусов и трамваев) . Это даст первое впечатление, какой шум по вспышкам
создает большой город. Такие вспышки могут внести вклад в создание ложных ШАЛ.
Данные спутника "Татьяна" дали только среднюю интенсивность ультрафиолетового
излучения над городами.
3.
Летом в Пуэбла в Мексике мы надеемся повторить измерение света звезд в горах и
попробовать регистрировать в горах атмосферные вспышки.