Компьютерное и полунатурное моделирование динамики управляемых систем
|

|
|
|
|
|
|
Угол [o] |
0 |
50 |
0 |
|
Угловая скорость [o/c] |
200 |
0 |
900 |
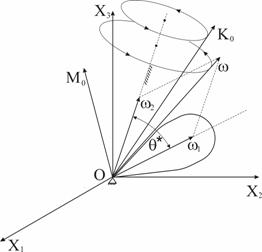
На
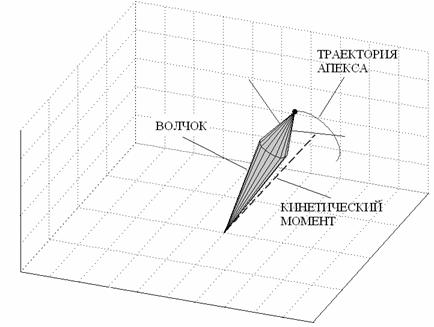
рис.8 показан кадр динамической визуализации движения. Видно, что тело
прецессирует относительно неподвижного вектора кинетического момента
(пунктирная линия). На рис.9 показана траектория апекса волчка. Пунктирные
линии соответствуют минимальному и максимальному значению угла нутации.
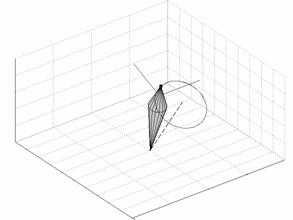
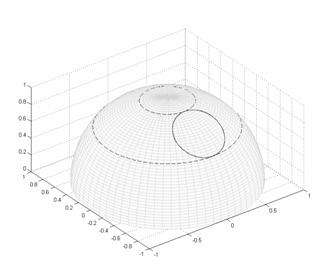
Рис.8. Динамическая визуализация движения Рис.9. Траектория апекса волчка
Случай
Лагранжа
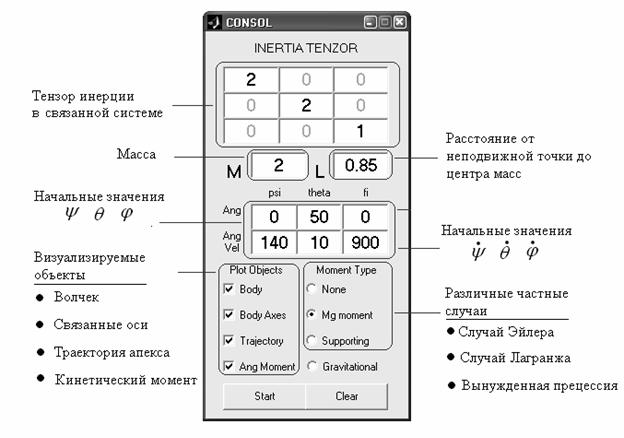
Рассмотрены три набора начальных данных (табл. 2).
Значения массы тела и расстояния от неподвижной точки до центра масс показаны
на рис.5.
Таблица 2. Начальные условия движения
|
|
|
|
|
|
Угол [o] |
0 |
50 |
0 |
|
Угловая скорость [o/c] |
80/110/140 |
10 |
900 |
На
рис.10 показаны траектории апекса волчка на единичной сфере. Данные типы
траекторий хорошо известны из аналитических исследований движения твердого тела
в случае Лагранжа.
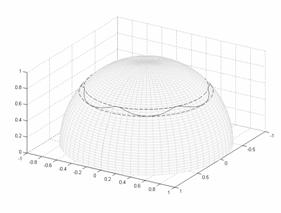
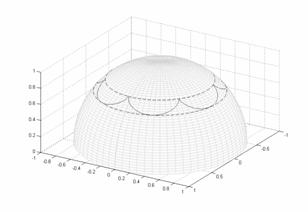
Рис.10 Траектории
апекса волчка на единичной сфере
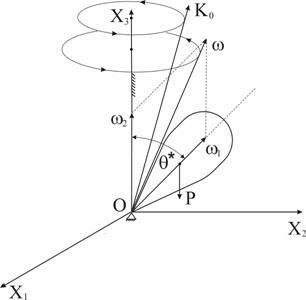
Вынужденная
регулярная прецессия
Начальные значения параметров приведены в таблице 3.
Момент, поддерживающий регулярную прецессию, вычисляется по формуле (5).
Качественный вид движения (кадр динамической визуализации) показан на рис.11, а
траектория апекса волчка на единичной сфере на рис.12. Тело прецессирует
относительно фиксированной в пространстве оси (направление переносной скорости ![]() ). Кинетический момент тела также прецессирует относительно
этой оси.
). Кинетический момент тела также прецессирует относительно
этой оси.
Таблица 3. Начальные условия движения
|
|
|
|
|
|
Угол [o] |
0 |
20 |
0 |
|
Угловая скорость [o/c] |
200 |
150 |
900 |
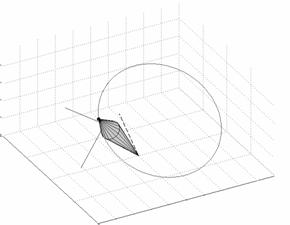
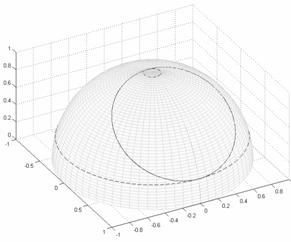
Рис.11. Качественный вид движения Рис.12.Траектория апекса волчка
Необходимо отметить тот факт, что природа вынуждающего
момента (природа сил, действующих на тело) не уточняется. Нахождение этих сил и
точек их приложения (конечно, при некоторых дополнительных предположениях)
может быть предметом лабораторной работы предлагаемой студентам. Программа
может быть не только средством демонстрации, но также и средством для
самостоятельной теоретической работы.
Вынужденная
регулярная прецессия в случае Лагранжа
Для качественной демонстрации вынужденной регулярной
прецессии в случае Лагранжа достаточно положить значение угловой нутации ![]() равным нулю, а
вынуждающий момент вычислять согласно (5). Начальные значения всех параметров
приведены в таблице 4
равным нулю, а
вынуждающий момент вычислять согласно (5). Начальные значения всех параметров
приведены в таблице 4
Таблица 4. Начальные условия движения
|
|
|
|
|
|
Угол [o] |
0 |
40 |
0 |
|
Угловая скорость [o/c] |
100 |
0 |
600 |
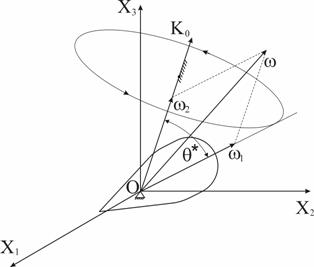
Тело
совершает вращение относительно оси динамической симметрии с постоянной угловой
скоростью ![]() . Ось динамической симметрии, в свою очередь, вращается с
постоянной угловой скоростью
. Ось динамической симметрии, в свою очередь, вращается с
постоянной угловой скоростью ![]() относительно истинной
вертикали. Угол между осью динамической симметрии и истиной вертикалью (угол
нутации
относительно истинной
вертикали. Угол между осью динамической симметрии и истиной вертикалью (угол
нутации ![]() ) остается постоянным. Вектор кинетического момента также
вращается с постоянной угловой скоростью
) остается постоянным. Вектор кинетического момента также
вращается с постоянной угловой скоростью ![]() относительно истинной
вертикали. Описанное движение (кадр динамической визуализации) представлено на
рис.13.
относительно истинной
вертикали. Описанное движение (кадр динамической визуализации) представлено на
рис.13.
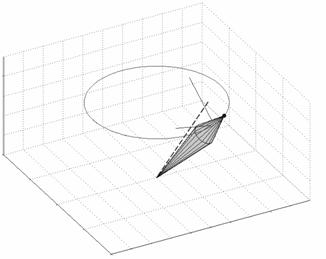
Рис.13. Качественный вид движения
Необходимо отметить, что масса тела и расстояние от
неподвижной точки до центра масс в данном случае не соответствуют значениям,
указанным на рис.5. Для нахождения этих параметров необходимо приравнять
абсолютные величины момента силы тяжести (как функции массы тела и расстояния
до центра масс) и вынуждающего момента (4’).
2.5. Компьютерная модель тела на струне
Кроме программы, описанной выше, создано так же
программное обеспечение, демонстрирующее движение тела, управляемого токовыми
катушками и маховиками, на струне.
Для моделирования динамики тела на струне и
исследования работы предложенных в [2] алгоритмов управления разработан
программный комплекс на ПЭВМ с использованием интегрированной среды.
Программный комплекс осуществляет численное интегрирование системы уравнений
движения [3] тела на струне методом Рунге-Кутта четвертого порядка с постоянным
шагом. Входными данными программного комплекса являются параметры стенда и
макета: длина струны, смещение точки подвеса, масса и тензор инерции макета.
Также задаются пользователем начальные данные, алгоритмы управления и их
параметры, модель магнитного поля.
Выходными данными программного комплекса являются
графики зависимости компонент вектора текущей угловой скорости и углов,
задающих ориентацию тела (Эйлера либо самолётных) от времени. Дополнительно
могут выводиться графики зависимости нагрузки на узел подвеса струны и энергии
системы от времени.
При запуске программы на процессоре с тактовой
частотой 2.2 ГГц и демонстрации результатов интегрирования в процессе работы
программы 10 сек моделирования осуществляется за 8 сек реального времени (при
шаге 0.01 сек).
На рис.14 представлен интерфейс программы, на котором
виден ряд функциональных клавиш:
start, stop, pause – начать,
остановить, приостановить расчёт, соответственно,
view previous results –
показать результаты предыдущих расчётов,
set default parameters –
установка параметров системы по умолчанию, в соответствии с “базовым вариантом”
(длина струны ![]() м), смещение точки подвеса от центра масс макета
м), смещение точки подвеса от центра масс макета ![]() см вдоль оси симметрии макета, масса тела
см вдоль оси симметрии макета, масса тела ![]() кг, тензор инерции
кг, тензор инерции ![]() кг·м2,
максимальный дипольный момент, создаваемый каждой катушкой
кг·м2,
максимальный дипольный момент, создаваемый каждой катушкой ![]() А·м2,
внешнее магнитное поле, создаваемое имитатором магнитного поля,
А·м2,
внешнее магнитное поле, создаваемое имитатором магнитного поля, ![]() Тл, начальная ориентация спутника задавалась с помощью углов
Эйлера, угол прецессии
Тл, начальная ориентация спутника задавалась с помощью углов
Эйлера, угол прецессии ![]() (углы здесь и далее в радианах), угол нутации
(углы здесь и далее в радианах), угол нутации ![]() , угол собственного вращения
, угол собственного вращения ![]() ),
),
body and string parameters – задание параметров тела и струны (длина струны,
смещение точки подвеса от центра масс макета вдоль оси симметрии тела, масса
тела, тензор инерции (рис.15)),
‘orbit’ parameters – параметры изменения внешнего магнитного поля,
initial conditions – начальные условия движения (ориентация и угловая
скорость)
algorithms – выбор алгоритма, который
будет использоваться в системе управления ориентацией, и его параметров
(рис.16),
extra – дополнительные
параметры (вывод дополнительных графиков, сохранение результатов в файл).
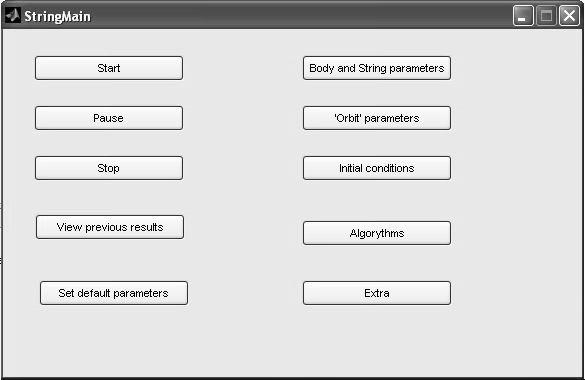
Рис.14. Интерфейс программы для моделирования движения тела на струне
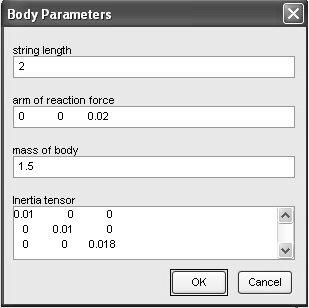
Рис.15. Меню для задания параметров тела и струны
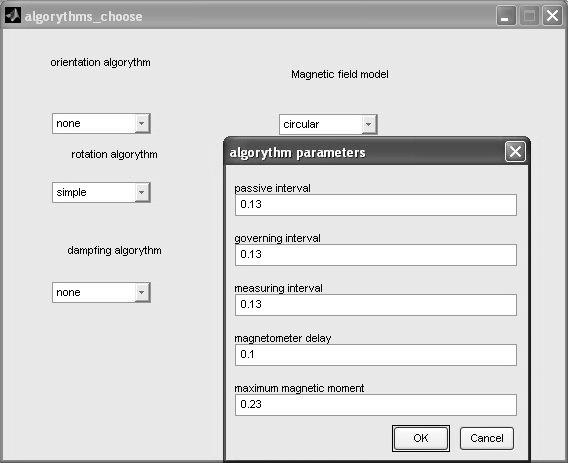
Рис.16. Меню выбора алгоритма и задания его параметров
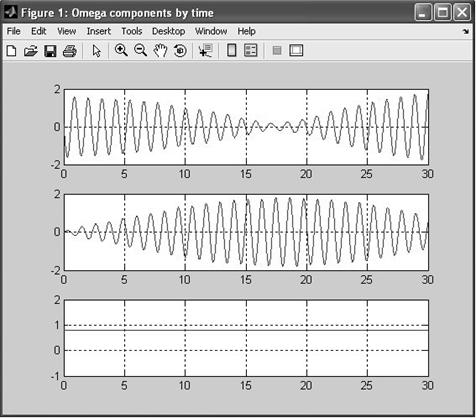
Рис.17. Выводимые графики
3. Полунатурное моделирование
Остановимся на возможностях имитационного
оборудования, приобретенного МФТИ в рамках Мегапроекта и доработанного в
Лаборатории “Управление и динамика сложных информационно-механических систем”.
В состав этого оборудования на настоящий момент входит имитатор магнитного
поля, несколько макетов, имитатор звездной камеры с имитатором звездного неба.
3.1. Имитатор магнитного поля Земли
Установленный в МФТИ имитатор геомагнитного поля
разработан в ИПМ им.М.В.Келдыша РАН и позволяет изменять магнитного поле по
величине и направлению в диапазоне, превышающем реальное магнитное поле Земли в
несколько раз. Имитатор представляет собой три взаимно перпендикулярные пары
токовых катушек и систему их управления, включающую в себя персональный
компьютер, программное обеспечение и широтно-импульсные модуляторы,
преобразующие управляющие сигналы, идущие от компьютера, в электрический ток
(рис.14).
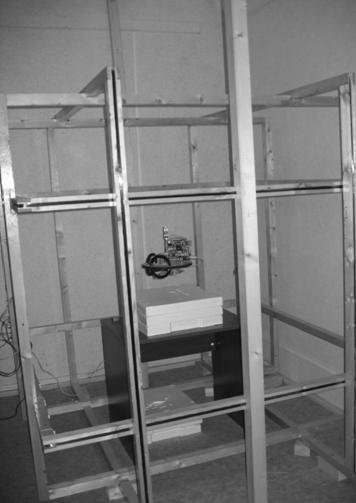
Рис.14. Общий вид имитатора геомагнитного поля
Имитатор
позволяет моделировать изменение магнитного поля, например, при движении
спутника по орбите Земли. В состав системы управления катушками входят три
широтно-импульсных модулятора (ШИМ), интерфейс управления ШИМ URC201, два блока питания и персональный компьютер. Общая
схема управления имитатором представлена на рис.15.
Рис.15. Схема управления имитатором геомагнитного поля
Специальное программное обеспечение, установленное на
персональном компьютере, рассчитывает требуемую величину магнитной индукции,
которую должен генерировать имитатор, и, используя известную характеристику B(I) (зависимость
величины индукции от силы тока), выдаёт команды интерфейсу управления ШИМ
установить заданную величину силы тока в катушках [4].
Имитатор используется как самостоятельная установка
для изучения моделей магнитного поля Земли, так и совместно с макетами
подвижных объектов, в частности, наноспутников для имитации их управляемого
движения.
3.2. Макеты управляемых систем
В настоящий момент имеется два различных по составу
измерительных и исполнительных элементов макета. Остановимся подробнее на
каждом из них.
Макет с
магнитной системой ориентации
В состав макета входят следующие элементы (рис. 16):
·
бортовой
компьютер (одноплатный компьютер JRex);
·
три токовые
катушки;
·
система
управления катушками;
·
плата питания;
·
аккумуляторные
батареи;
·
трёхосный
магнитометр;
·
Wi-Fi адаптер.
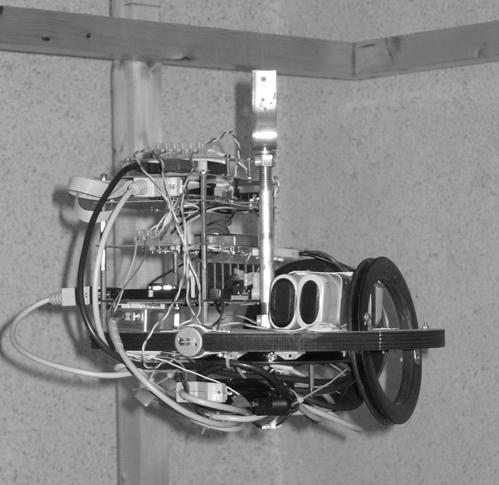
Рис.16. Макет с магнитной системой ориентации
При включении питания макета от аккумуляторных батарей
подаётся питание на все его системы с помощью преобразователей напряжения,
входящих состав платы питания. С компакт-флеш-диска бортового вычислителя
загружается операционная система Windows
XP Embedded.
Далее, с помощью утилиты Remote
Desktop (Удалённый рабочий стол) персонального компьютера
управления стендом осуществляется подключение к компьютеру макета через Wi-Fi. Там
запускается приложение MicrosatelliteModeller, созданное в ИПМ им. М.В.Келдыша РАН [4]. После этого можно приступать
к проведению моделирования. Этот макет вместе с имитатором магнитного поля
образует стенд с магнитными элементами. Его схема представлена на рис.17
(пунктирной линией показаны взаимодействующие элементы стенда).
Рис.17. Схема стенда с магнитными элементами
Первые лабораторные работы на этом макете связаны с
получением навыков работы с измерительным оборудованием, в частности, трёхосным
магнитометром, а так же с определением параметров макета и струны: момента
инерции тела относительно оси вращения и коэффициента упругости нити.
Лабораторная работа основана на сравнении свободных
крутильных колебаний тела на струне и колебаний под действием магнитного
управления, демпфирующего угловую скорость. В ходе этой работы студенты
применяют полученные на лекциях и семинарах навыки построения математических
моделей механических систем и знакомятся с алгоритмами управления ориентацией
спутников с помощью активных магнитных систем. Кроме того, изучаются методы
определения угловой скорости и угла поворота по косвенным измерениям, например,
по измерениям магнитометра.
Макет с
гироскопическими элементами
Структура этого макета идентична структуре предыдущего
макета, но есть существенное отличие по составу измерительных и исполнительных
элементов. Макет состоит из следующих элементов (рис.18):
·
бортовой
компьютер (одноплатный компьютер JRex);
·
двигатель-маховик;
·
имитатор
реактивных двигателей;
·
система
управления исполнительными элементами;
·
плата питания;
·
аккумуляторные
батареи;
·
одноосный
оптоволоконный датчик вращения;
·
одноосный МЭМС
датчик угловой скорости;
·
Wi-Fi адаптер.
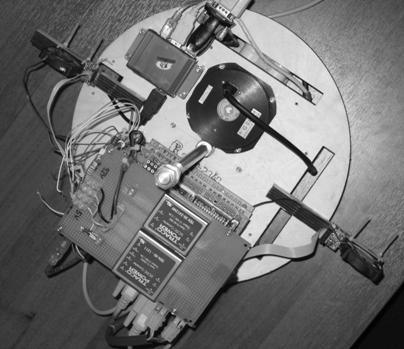
Рис.18. Макет с гироскопическими элементами
Принцип работы во многом аналогичен макету с
магнитными элементами. Отличие состоит в том, что макет теперь управляется с
помощью реактивных исполнительных элементов (двигатель-маховик, имитатор
реактивных двигателей). Принцип их работы, как известно, основан на законах
сохранения в первом случая кинетического момента (момента импульса), во втором
количества движения (импульса). Общая схема стенда с гироскопическими
элементами, который состоит из этого макета и подвеса, представлена на рис.19.
Рис.19. Общая схема лабораторного стенда с гироскопическими элементами
Первые лабораторные работы посвящены знакомству
студентов с датчиками угловой скорости. Обсуждаются их принципы и особенности
работы. В ходе этого студенты сталкиваются с проблемой работы с зашумлёнными
данными измерений. Излагаются элементы теории фильтра Калмана [5], являющего
одним из распространенных фильтров, использующихся в
процессе управления сложными динамическими системами, например, спутниками. Здесь на примере задачи определения ориентации тела,
подвешенного на струне, предлагается создать простейшие модели движения
(перманентное вращение, крутильные колебания, крутильные колебания с
затуханием) и использовать их в фильтре для определения угловой скорости и угла
поворота.
На макете применяются принципиально разные
по своим свойствам и характеристикам датчики угловой скорости. Это
оптоволоконный датчик вращения VG-910D и МЭМС-датчик угловой скорости ADIS16100. Это позволяет рассказать о принципах работы
современных датчиков угловой скорости и дать студентам представление об области
применимости каждого из них.
Следующим этапом является работа с исполнительными
элементами системы ориентации тела. Изучаются способы калибровки маховиков и
имитатора реактивных двигателей. Это требует создания математических моделей
движения тела на струне с реактивным управлением.
В результате выполнения лабораторных работы у
студентов формируются навыки создания математических моделей сложных
механических систем и практического использования измерительного оборудования.
3.3. Стенд для изучения работы звездной камеры
Ещё одной лабораторной установкой, разработанной в ИПМ
им.М.В.Келдыша РАН и воспроизведенной в МФТИ, является стенд для изучения
работы звездной камеры, состоящий из имитаторов звездной камеры и звёздного
неба [6]. Схема, описывающая его работу, изображена на рис.20 (пунктирной
линией обозначены взаимодействующие элементы).
Рис.20. Схема взаимодействия имитаторов звёздного неба и звёздной камеры
С помощью программного обеспечения на экране симулируется
картина звёздного неба, как бы видела его камера, установленная на спутнике,
который движется по орбите и совершает вращательное движение относительно
своего центра масс. Входными параметрами программы являются параметры орбиты и
начальные условия углового движения. Для симуляции используется звёздный
каталог. С помощью видеокамеры изображение снимается и сохраняется на
компьютере, где уже происходит его обработка. На снимке звёздного неба
выделяется несколько самых ярких звёзд, они сравниваются с каталогом и, таким
образом определяется ориентация аппарата. Угловая скорость вычисляется с
помощью обработки нескольких последовательных кадров. Таким образом, выходными
данными программы являются параметры углового движения спутника. Программное
обеспечение для имитации звездного неба и обработки изображений может
устанавливаться, как на разных компьютерах, так и на одном. В нашем случае
используется ноутбук, к которому подсоединяется внешний монитор (рис.21).
В ходе выполнения лабораторных работ студенты получают
представление о назначении звёздного каталога и учатся с ним работать. Кроме
этого, приобретаются навыки калибровки камеры и обработки изображения. Так же
студенты применяют знания, полученные на этапе изучения теории движения тела и
математического моделирования динамики спутника, для определения параметров его
углового движения.

Рис.21. Имитаторы звездной камеры и звёздного неба
4. Заключение
Все описанные выше лабораторные работы выполняются в
рамках созданного в МФТИ учебного курса “Динамика и управление механическими
системами”. Кроме практических занятий курс так же включает в себя лекции.
Тематика лекции разнообразна, но основное направление - это теория пассивного и
управляемого движения спутников относительно центра масс. В курс входят также
лекции по групповым полётам спутников (Formation Flying),
по ГОСТ и ЕСПД как необходимом элементе проведения любой НИОКР. Структура курса
достаточно гибкая. Подобный курс позволяет комплексно подойти к процессу
обучения и пройти со студентами основные этапы разработки и создания
информационно-механических систем. Предложенная структура курса может без труда
быть применена и для обучения студентов по другим тематикам, требующим тесного
сочетания теоретических знаний с практических навыков в работе с инженерными
приложениями.
Учитывая склонность студентов активно работать с
Интернетом, а не бумажными статьями, в списке литературы специально приведены
ссылки на препринты, имеющие доступные версии в электронной библиотеке ИПМ
им.М.В.Келдыша РАН.
Благодарности
Работа
выполнена при поддержке Минобрнауки, Роснауки, РФФИ и кафедры теоретической
механики МФТИ.
Литература
1. М.Ю.Овчинников, А.А.Дегтярёв. Применение компьютерных технологий при изучении теоретической механики и исследовании динамики сложных механических систем: Учебно-методическое пособие. М.: МФТИ, 2007, 56 с.
2. А.А.Ильин, М.Ю.Овчинников, В.И.Пеньков. Алгоритмы
магнитной ориентации спутника, стабилизируемого собственным вращением. Препринт
ИПМ им. М.В.Келдыша РАН, 2005, №19, 32 c.
http://www.keldysh.ru/papers/2005/prep19/prep2005_19.html.
3. И.В.Прилепский. Математическое моделирование динамики
прототипа малого спутника с активной МСО на испытательном стенде. Труды 49-й
научной конференции МФТИ "Современные проблемы фундаментальных наук".
Часть III. Аэрофизика и космические исследования. М.: 2006, с. 226-228.
4. С.О.Карпенко, М.Ю.Овчинников. Лабораторный стенд для
полунатурной отработки систем ориентации микро- и наноспутников. Препринт ИПМ
им. М.В.Келдыша РАН, 2008, №38, 32 c.
http://www.keldysh.ru/papers/2008/source/prep2008_38.doc.
5. Д.С.Иванов, М.Ю.Овчинников. Использование одноосного
гироскопа для определения ориентации макета в лабораторных условиях. Препринт
ИПМ им. М.В.Келдыша РАН, 2008, №11, 32 c.
http://www.keldysh.ru/papers/2008/prep11/
prep2008_11.html .
6. М.Ю.Овчинников, А.С.Середницкий, А.М.Овчинников.
Лабораторный стенд для отработки алгоритмов определения движения по снимкам
звёздного неба. Препринт ИПМ им. М.В.Келдыша РАН, 2006, №43,
32 c.
http://www.keldysh.ru/papers/2006/prep43/prep2006_43.html.