
Робототехника
и мехатроника
Исследования по робототехнике и мехатронике начались в Институте практически в самом начале 70-х годов по инициативе академика Д.Е.Охоцимского. Они были связаны с проблемой создания роботов и транспортных средств нового типа - шагающих аппаратов. С теоретической точки зрения, задачи управления движением таких механических объектов составили принципиально новый класс задач управления сложными системами с многими механическими степенями свободы.
Примеры математических компьютерных моделей и лабораторных макетов, применявшихся в исследованиях шагающих аппаратов, показаны на рис. 33. Эти работы практически впервые в мире показали возможность решения задачи управления ходьбой технических устройств - роботов (первые публикации цикла [166,167,168], фундаментальные результаты обобщены в монографии [169]).
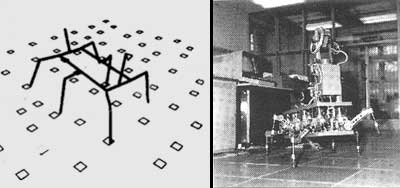
В настоящее время эти исследования продолжаются. Широко используются современные средства работы на ЭВМ (например, графика и мультимедиа), применяется современная микрокомпьютерная техника, бортовые ЭВМ, интегральные датчиковые системы. Создаются реальные прототипы будущих машин.
Позднее были проведены другие циклы исследований робототехнических систем, заложившие основу теории построения роботов и методов их реализации как технических устройств. Разработана теория и проведено моделирование двуногой ходьбы [170,171]. Рассмотрен большой класс задач автоматизации сборки. Проведены исследования сенсорных систем роботов и систем их приводов, найдены оптимальные варианты их конструкций.
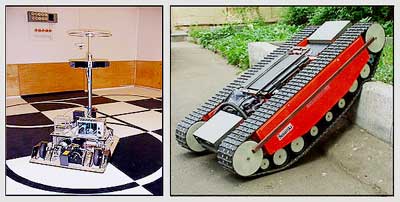
Рис. 35. Гусеничный "вседорожный" робот
В настоящее время исследования идут также по таким направлениям, как создание интеллектуальных автономных колесных роботов [172] (пример показан на рис. 34), роботов с гибридными колесно-шагающими движителями [173], разработка гусеничного автономного робота для естественной среды [174] (рис. 35), управление мини-роботами, управление роботами-манипуляторами.
Разработаны методы автоматического взаимодействия робота-манипулятора с быстрыми подвижными объектами, совершающими заранее неизвестные движения под действием естественных сил [175,176]. Эксперименты проводились с двумя типами объектов - стержнем на бифилярном подвесе (рис. 36) и сферическими маятниками. Контур управления роботом содержит систему технического зрения. Выполняется прогноз движения объектов на основе их динамических моделей.
Разработаны эффективные методы удаленного управления роботами через Интернет и, более широко, в случаях управления роботами с задержками управляющего сигнала и при нагруженных каналах связи. Методы основаны на использовании "виртуального дублера" - трехмерных моделей робота и его рабочего пространства, функционирующих в масштабе реального времени [177,178,179] (рис. 37).
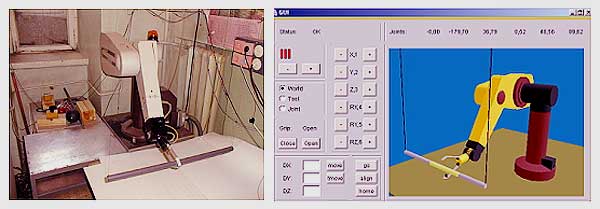
Рис. 37. "Виртуальный дублер" реального робота

Разработаны эффективные методы удаленного управления роботами через Интернет и, более широко, в случаях управления роботами с задержками управляющего сигнала и при нагруженных каналах связи. Методы основаны на использовании "виртуального дублера" - трехмерных моделей робота и его рабочего пространства, функционирующих в масштабе реального времени [177,178,179] (рис. 37).
Удаленное управление роботом через сеть общего пользования было продемонстрировано во время Международной конференции по робототехнике ICRA'2001 (Сеул, Южная Корея, май 2001). Робот-манипулятор управлялся из конференц-зала конференции на расстоянии свыше 10000 км.
И, наконец, еще один класс новых, весьма актуальных задач - задачи группового управления коллективом роботов, совместно решающих общую задачу. Эти задачи начали развиваться как задачи управления командой роботов, в том числе - играющих в командную игру. В рамках этого направления в Институте рассматривается задача управления командой роботов, играющих в футбол (это эффективный "полигон" для отработки новых методов).
Исследования задач управления роботами позволили создать и развить теории и методы, открывшие новые страницы в теоретической механике, теории управления, программировании и смежных научных дисциплинах. Сейчас они также составляют содержание новых курсов лекций и новых практических занятий, которые их авторы читают и ведут в МГУ, МФТИ, МГТУ им. Н.Э.Баумана, других вузах.