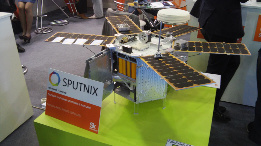
Microsatellite TabletSat-Aurora
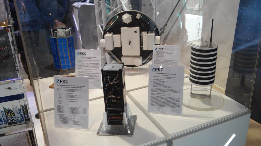
Nanosatellites of TNS series family
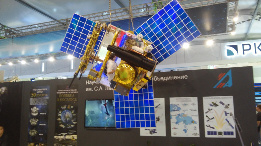
Small satellite of Lavochkin Company

Head of the Laboratory Nikita Ivlev

Artem Vasunik with microsatellite Chibis-M model
31st August 2015
| | |
The 12th International Aviation
and Space Salon MAKS 2015 was held in Zhukovsky district (Moscow region) on
24–30 August. Dr. Danil Ivanov has visited the salon and discussed
collaboration with our partners from space industry.
Our colleagues
from Sputnix Ltd presented a mock-up of the microsatellite TabletSat-Aurora (launched successfully last year) at the stand of the Skolkovo
innovation center. Our team provided algorithms for the attitude control system
of the satellite. Now we are constructing a unique facility for simulation of formation
flying motion.
The stand
of JSC Russian
Space Systems hosted an exhibition on nanosatellites.
The first one of TNS series (on the R of the photo) was launched in 2005, the
second satellite (on the L of the photo) is to be launched this year. Our group
provides angular motion control and supplies elements of passive attitude
control system for these satellites.
Lavochkin
Research and Production Association demonstrated a project for a
small asteroid-exploring satellite. Our group evaluates both reaction wheel desaturation
under disturbances effecting the satellite and thruster execution errors.
Vivid interest
was attracted to the stand of the Laboratory of high-precision attitude control
systems by Moscow Institute of Physics and Technology and Sputnix Ltd. There a
pilot model of reaction wheel for small satellites for high-resolution
photography was demonstrated. The high-precision reaction wheels with broad range
of control torques can be mounted on various satellites including the nano-
ones.
The salon’s
education stand hosted a lot of interesting school projects. Artyom Vasyunik has
presented a 3D model of the microsatellite Chibis-M. The highly detailed model
is well suited for simulation of satellite
attitude motion control algorithms studied by our group. We have developed the
algorithms of angular motion control for Chibis-M as well.
|
| |
|